Ф1К.1
Изобретение относится к сельскому хозяйству, а именно к ветеринарии, и может найти применение как на крупных комплексах, так и на небольших фермах
Целью изобрете1шя является повышение оперативности определения физиологически ослабленных животных.
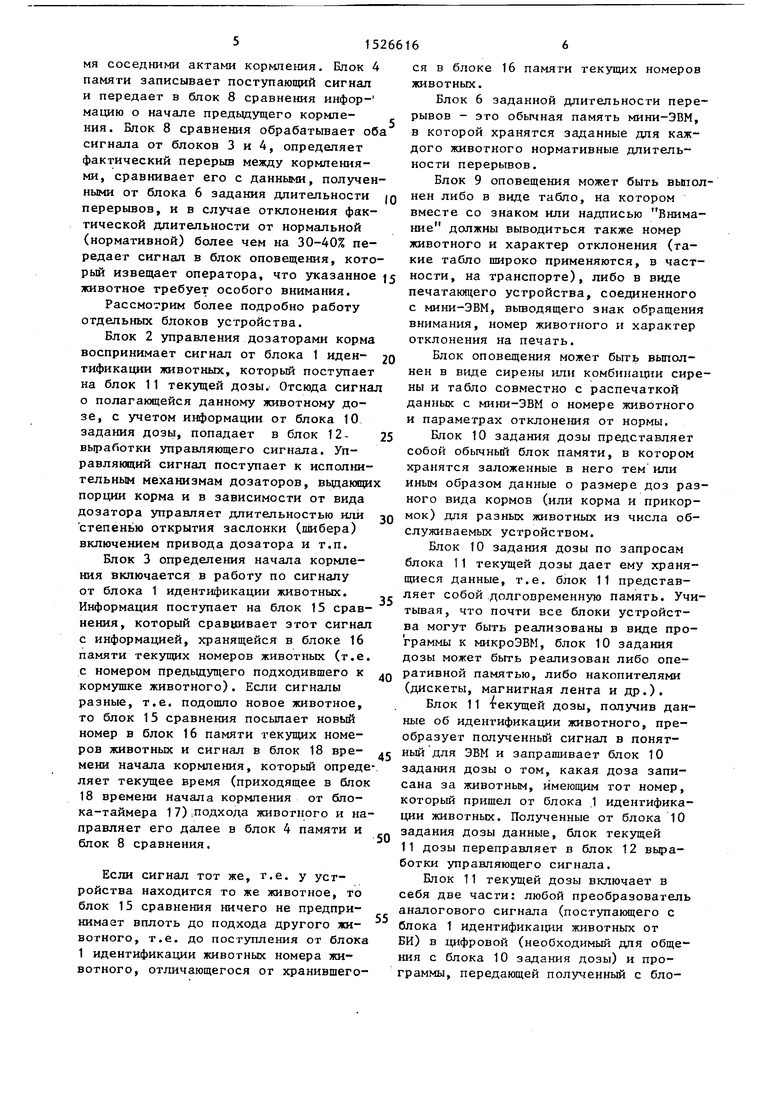
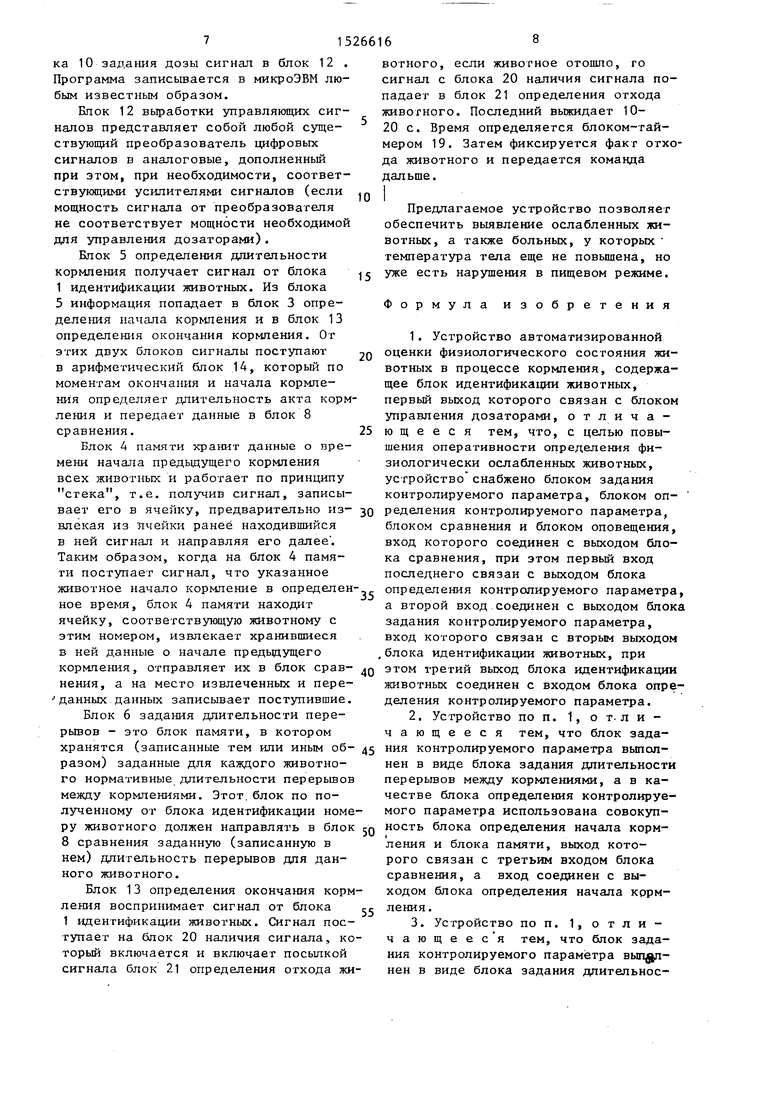
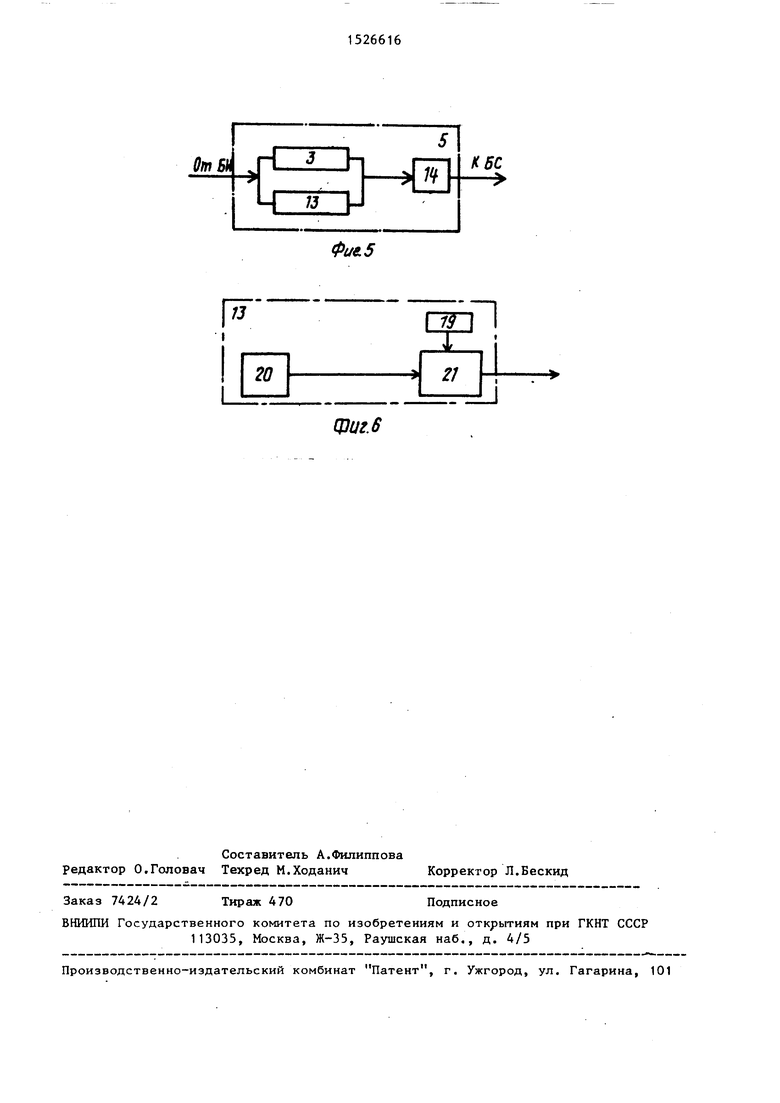
На фиг. 1 представлена блок-схема устройства автоматизированной оценки физиологического состояния животных в процессе кормления, в случае определения длигельности пер ерывов между двумя кормлениями; на фиг, 2 - то же, в случае определения длительности акта кормления; на фиг. 3 - функциональная схема блока определения начала кормле1шя на фиг. 4 - функциональная схема блока управления дозаторами корма; на фиг. 5 - функциональная схема блока определения длительности кормления; на фиг. 6 - функциональная схема блока определения окончания кормле1шя.
Устройство автоматизированной оценки физиологического состояния животных в процессе корт пения содержит блок 1 идентификации 7та:вотных, блок 2 управления дозаторами, блок определения контролируемого параметра, в состав которого входят или совокупность блока 3 определения начала корм и блока 4 памяти, или блок 5 определения длительности кормле шя. Устройство включает также блок задания контролируемого параметра, в качестве которого используют или блок, 6 задания длительности перерывов или блок 7 задания длительности кормления. В устройстве использованы блок 8 сравнения и блок 9 оповещения. В состав блока 2 управления дозаторами входит блок 10 задания дозы, блок 11 текущей дозы и блок 12 выработки управляющего сигнала. Блок 5 определения длительности кормления включает блок 3 определения начала кормления, блок 13 определения окончания кормления и арифметический блок 14. Блок 3 определения начала кормления включает блок 15 сравнения, блок 16 памяти текущих номеров животных, блок- таймер 17 и блок 18 времени начала кормления. Блок 13 определения оконч кия кормления содержит блок-таймер 19, блок 20 наличия сигнала и блок 2 определения отхода животного от кормушки .
0
5
0
5
30
35
40
45
50
55
Устройство автоматизированной оценки физиологического состояния животных в процессе кормления работает следующим образом.
При подходе животного к кормушке блок 1 идентификации животного идентифицирует его и передает сигналы в блок 2 управления дозаторами корма, в блок определения контролируемого параметра и в блок задания контролируемого параметра. Блок 2 управления дозаторами корма дает команду дозаторам на выдачу животному полагающейся ему порции корма. В зависимости от вида контролируемого параметра на этом этапе возможно два сходных случая :
Блок 7 задания длительности кормления направляет в блок сравнения заданную (нормальную для данного животного) длительность кормления, а блок 5 определения длительности кормления определяет время начала кормления посредством блока 3. После отхода животного от кормушек, т.е. после прекраще1шя кормления, сигнал от блока 1 идентификации животных перестает поступать на блок 5 определения длительности кормления и он определяет время окончания кормления посредством блока 13, затем, вычитая время начала кормления из времени окончания, получают с помощью арифметического блока 14 разность, т.е. фактическую длительность кормления. Этот сигнал направляется в блок сравнения, который сравнивает его с заданным, полученным от блока 7 задания длительности кормления. В том случае, если фактическая длительность кормления отличается от заданной более чем на определенную наперед заданную величину, определяемую для калодого вида животных и для каждой возрастной группы, то сигнал с блока 8 сравнения поступает на блок 9 оповещения. Последний извещает оператора, что указанное животное требует особого внимания и ухода, так как у него выявлены нарушения в режиме кормления. Блок 3 определения начала кормления фиксирует время начала кормления и направляет его в блок 4 памяти и в блок 8 сравнения. Блок 6 задания длительности перерывов направляет в блок 8 сравнения информацию о заданной (нормальной для данного животного) длительности перерывов между дву51526616
мя соседними актами кормления. Блок 4 памяти записывает поступающий сигнал и передает в блок 8 сравнения инфор- мацию о начале предьщущего кормления. Блок 8 сравнения обрабатывает оба сигнала от блоков 3 и 4, определяет фактический перерыв между кормлениями, сравнивает его с данными, полученными от блока 6 задания длительности |Q перерывов, и в случае отклонения фактической длительности от нормальной (нормативной) более чем на 30-40% передает сигнал в блок оповещения, котося в блоке 16 памяти текущих номеро животных.
Блок 6 заданной длительности пер рывов - это обычная память мини-ЭВМ в которой хранятся заданные для каж дого животного нормативные длительности перерывов.
Блок 9 оповещения может быть вып нен либо в виде табло, на котором вместе со знаком или надписью Вним ние должны выводиться также номер животного и характер отклонения (та кие табло широко применяются, в час
рый извещает оператора, что указанное J5 ности, на транспорте), либо в виде
20
30
35
животное требует особого внимания.
Рассмотрим более подробно работу отдельных блоков устройства.
Блок 2 управления дозаторами корма воспринимает сигнал от блока 1 идентификации животных, который поступает на блок 11 текущей дозы. Отсюда сигнал о полагающейся данному животному дозе, с учетом информации от блока 10 задания дозы, попадает в блок 12- 25 выработки управляющего сигнала. Управляющий сигнал поступает к исполнительным механизмам дозаторов, вьщающих порции корма и в зависимости от вида дозатора управляет длительностью или степенью открытия заслонки (шибера) включением привода дозатора и т.п.
Блок 3 определения начала кормления включается в работу по сигналу от блока 1 идентификации животных. Информация поступает на блок 15 сравнения, который сравнивает этот сигнал с информацией, хранящейся в блоке 16 памяти текущих номеров животных (т.е. с номером предьщущего подходившего к кормушке животного). Если сигналы разные, т.е. подошло новое животное, то блок 15 сравнения посылает новый номер в блок 16 памяти текущих номеров животных и сигнал в блок 18 времени начала кормления, который определяет текущее время (приходящее в блок 18 времени начала кормления от блока-таймера 1 7) ,подхода животного и направляет его далее в блок 4 памяти и блок 8 сравнения.
Если сигнал тот же, т.е. у устройства находится то же животное, то блок 15 сравнения ничего не предпринимает вплоть до подхода другого животного, т.е. до поступления от блока 1 идентификации животных номера животного, отличающегося от хранившего40
45
50
печатающего устройства, соединенног с мини-ЭВМ, вьшодящего знак обращен внимания, номер животного и характе отклонения на печать.
Блок оповещения может быть выпол нен в виде сирены или комби}1а1р1и си ны и табло совместно с распечаткой данных с мини-ЭВМ о номере животног и параметрах отклонения от нормы.
Блок 10 задания дозы представляе собой обычньй блок памяти, в которо хранятся заложенные в него тем или иным образом данные о размере доз р ного вида кормов (или корма и прико мок) для разных животных из числа о служиваемых устройством.
Блок 10 задания дозы по запросам блока 11 текущей дозы дает ему хран щиеся данные, т.е. блок 11 представ ляет собой .долговременную память. У тывая, что почти все блоки устройст ва могут быть реализованы в виде пр граммы к микроэвм, блок 10 задания дозы может быть реализован либо опе ративной памятью, либо накопителями (дискеты, магнитная лента и др.).
Блок 11 текущей дозы, получив да ные об идентификации животного, преобразует полученный сигнал в понятный для ЭВМ и запрашивает блок 10 задания дозы о том, какая доза записана за животным, имеющим тот номер который пришел от блока .1 идентифика ции животных. Полученные от блока 10 задания дозы данные, блок текущей 11 дозы переправляет в блок 12 вьра- ботки управляющего сигнала.
Блок 11 текущей дозы включает в себя две части: любой преобразовател аналогового сигнала (поступающего с блока 1 идентифика1щи животных от ЕЙ) в цифровой (необходимый для обще ния с блока 10 задания дозы) и программы, передающей полученный с блося в блоке 16 памяти текущих номеров животных.
Блок 6 заданной длительности перерывов - это обычная память мини-ЭВМ, в которой хранятся заданные для каждого животного нормативные длительности перерывов.
Блок 9 оповещения может быть выполнен либо в виде табло, на котором вместе со знаком или надписью Внимание должны выводиться также номер животного и характер отклонения (такие табло широко применяются, в част0
0
5
5
0
5
0
печатающего устройства, соединенного с мини-ЭВМ, вьшодящего знак обращения внимания, номер животного и характер отклонения на печать.
Блок оповещения может быть выполнен в виде сирены или комби}1а1р1и сирены и табло совместно с распечаткой данных с мини-ЭВМ о номере животного и параметрах отклонения от нормы.
Блок 10 задания дозы представляет собой обычньй блок памяти, в котором хранятся заложенные в него тем или иным образом данные о размере доз разного вида кормов (или корма и прикормок) для разных животных из числа обслуживаемых устройством.
Блок 10 задания дозы по запросам блока 11 текущей дозы дает ему хранящиеся данные, т.е. блок 11 представляет собой .долговременную память. Учитывая, что почти все блоки устройства могут быть реализованы в виде программы к микроэвм, блок 10 задания дозы может быть реализован либо оперативной памятью, либо накопителями (дискеты, магнитная лента и др.).
Блок 11 текущей дозы, получив данные об идентификации животного, преобразует полученный сигнал в понятный для ЭВМ и запрашивает блок 10 задания дозы о том, какая доза записана за животным, имеющим тот номер, который пришел от блока .1 идентификации животных. Полученные от блока 10 задания дозы данные, блок текущей 11 дозы переправляет в блок 12 вьра- ботки управляющего сигнала.
Блок 11 текущей дозы включает в себя две части: любой преобразователь аналогового сигнала (поступающего с блока 1 идентифика1щи животных от ЕЙ) в цифровой (необходимый для общения с блока 10 задания дозы) и программы, передающей полученный с бло10
71526616
ка 10 задания дозы сигнал в блок 12 . Программа записывается в микроЭВМ любым известным образом.
Блок 12 выработки управляющих сигналов представляет собой любой существующий преобразователь цифровых сигналов в аналоговые, дополненный при этом, при необходимости, соответствующими усилителями сигналов (если мощность сигнала от преобразователя не соответствует мощности необходимой для управления дозаторами).
Блок 5 определения длительности кормления получает сигнал от блока 1 идентификации животных. Из блока 5 информация попадает в блок 3 опре- делеш1я начала кормления и в блок 13 определения окончания кормления. От этих двух блоков сигналы поступают в арифметический блок 14, который по моментам окончания и начала кормления определяет длительность акта кормления и передает данные в блок 8 сравнения.25
Блок 4 памяти хранит данные о времени начала предьщущего кормления всех животных и работает по принципу
15
8
вотного, если животное отошло, то сигнал с блока 20 наличия сигнала попадает в блок 21 определения отхода животного. Последний выжидает 10- 20 с. Время определяется блоком-таймером 19. Затем фиксируется факт отхода животного и передается команда дальше.
I
Предлагаемое устройство позволяет
обеспечить выявление ослабленных животных, а также больных, у которых температура тела еще не повышена, но уже есть нарушения в пищевом режиме.
Формула изобретения
20
1. Устройство автоматизированной оценки физиологического состояния животных в процессе кормления, содержащее блок идентификации животных, первый выход которого связан с блоком управления дозаторами, отличающееся тем, что, с целью повышения оперативности определения физиологически ослабленных животных, устройство снабжено блоком задания контролируемого параметра, блоком оп- вает его в ячейку, предварительно из- зо ределения контролируемого параметра,
стека, т.е. получив сигнал, записывлекая из ячейки ранее находившийся в ней сигнал и направляя его далее . Таким образом, когда на блок 4 памяти поступает сигнал, что указанное животное начало кормление в определенное время, блок 4 памяти находит ячейку, соответствующую животному с этим номером, извлекает хранившиеся в ней данные о начале предьдущего кормления, отправляет их в блок сравнения, а на место извлеченных и пере- данных данных записывает поступившие. Блок 6 задания длительности перерывов - это блок памяти, в котором
блоком сравнения и блоком оповещения, вход которого соединен с выходом блока сравнения, при этом первый вход последнего связан с выходом блока
,с определения контролируемого параметра а второй вход соединен с выходом блок задания контролируемого параметра, вход которого связан с вторым выходом .блока идентификации животных, при
4Q этом третий выход блока идентификации животных соединен с входом блока опре деления контролируемого параметра.
2. Устройство по п. 1, о т-л и - чающееся тем, что блок задахранятся (записанные тем или иным об- дз ния контролируемого параметра выпол- разом) заданные для каждого животно-нен в виде блока задания длительности
го нормативные длительности перерьшов между кормлениями. Этот.блок по полученному от блока идентификации номеперерывов между кормлениями, а в качестве блока определения контролируемого параметра использована совокупность блока определения начала кормления и блока памяти, выход которого связан с третьим входом блока сравнения, а вход соединен с выходом блока определения начала кррм- ления.
ру животного должен направлять в блок
50
8 сравнения заданную (записанную в нем) длительность перерывов для данного животного.
Блок 13 определения окончания кормления воспринимает сигнал от блока гс 1 идентификации животных. Сигнал поступает на блок 20 наличия сигнала, который включается и включает посылкой сигнала блок 21 определения отхода жи8
вотного, если животное отошло, то сигнал с блока 20 наличия сигнала попадает в блок 21 определения отхода животного. Последний выжидает 10- 20 с. Время определяется блоком-таймером 19. Затем фиксируется факт отхода животного и передается команда дальше.
I
Предлагаемое устройство позволяет
обеспечить выявление ослабленных животных, а также больных, у которых температура тела еще не повышена, но уже есть нарушения в пищевом режиме.
Формула изобретения
блоком сравнения и блоком оповещения, вход которого соединен с выходом блока сравнения, при этом первый вход последнего связан с выходом блока
определения контролируемого параметра, а второй вход соединен с выходом блока задания контролируемого параметра, вход которого связан с вторым выходом блока идентификации животных, при
этом третий выход блока идентификации животных соединен с входом блока определения контролируемого параметра.
2. Устройство по п. 1, о т-л и - чающееся тем, что блок зада
с
перерывов между кормлениями, а в качестве блока определения контролируемого параметра использована совокупность блока определения начала кормления и блока памяти, выход которого связан с третьим входом блока сравнения, а вход соединен с выходом блока определения начала кррм- ления.
3. Устройство по п. 1, о т л и - чающеес я тем, что блок задания контролируемого параметра нен в виде блока задания длительноети кормления, а в качестве блока опре- использован блок определения длигель- деления контролируемого параметра носги кормления.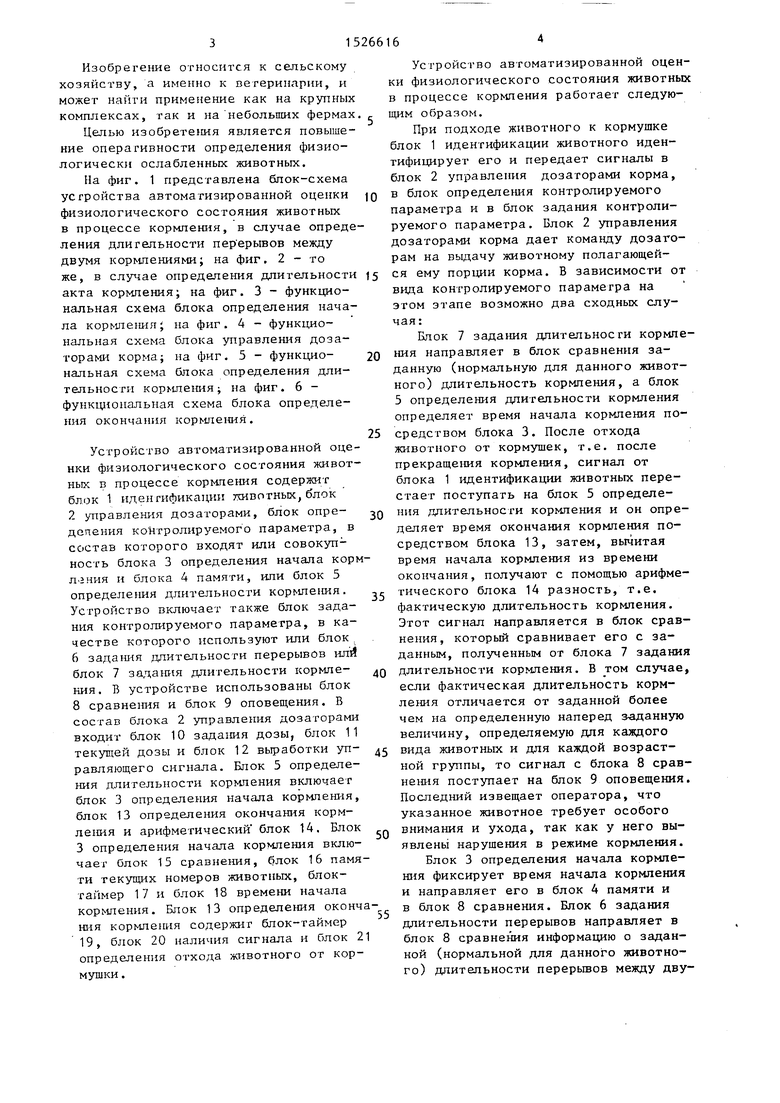
Изобретение относится к сельскому хозяйству, к области ветеринарии. Цель изобретения - повышение оперативности определения физиологически ослабленных животных. Устройство включает блок 1 идентификации животных и блок 2 управления дозаторами. В устройство введены блоки задания и определения контролируемого параметра. В качестве контролируемого параметра может выступать длительность акта кормления или длительность перерывов между двумя соседними актами кормления. В состав устройства входят блок 9 оповещения и блок 8 сравнения. После подхода животного к кормушке блок 1 идентификации животных определяет номер животного ,согласно которому блок 2 управления дозаторами обеспечивает выдачу порции корма, полагающейся данному животному. Параллельно осуществляется контроль контролируемого параметра. Блок 8 сравнения производит сравнение заданной и реальной величин данного параметра. Если отклонение разности превышает заранее установленную границу, то поступает сигнал на блок 9 оповещения. Блок оповещения сигнализирует об отклонениях в физиологическом состоянии животного, вызывающих нарушение в режиме его кормления. 2 з.п.ф-лы, 6 ил.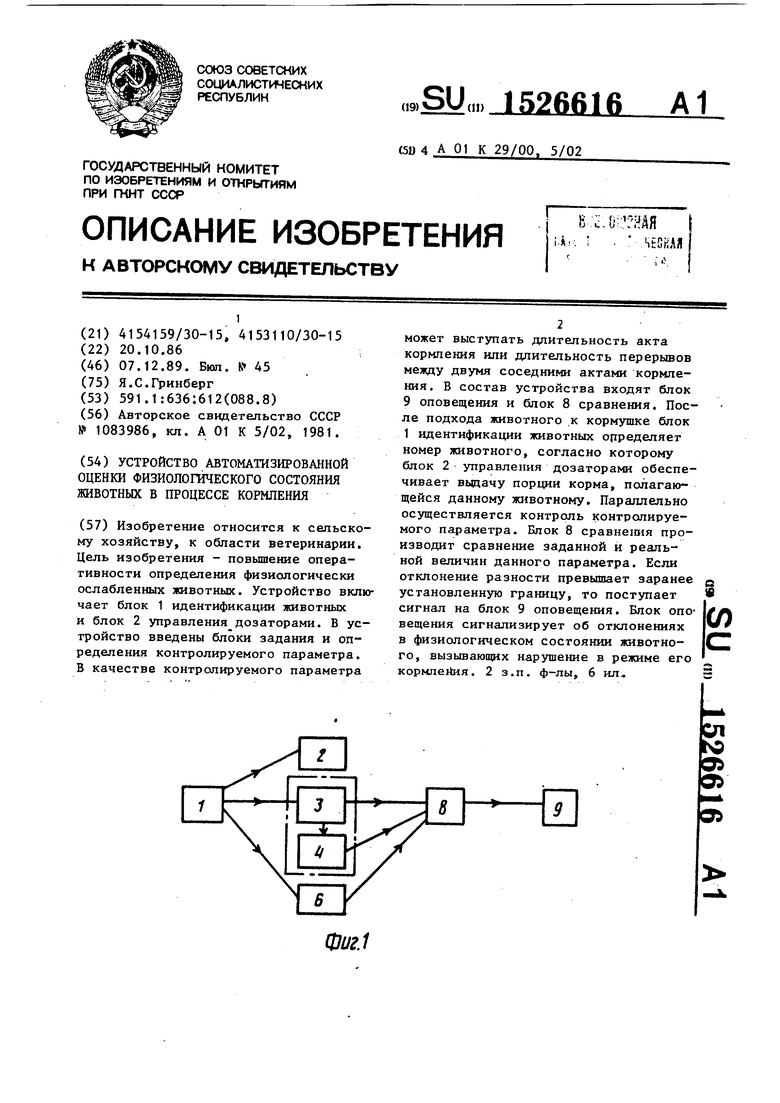
16
ОтбЛ
15
L:
Фиг. 2
Л
18
КбЛибС
I
ф1/г.З
I
Фи9.
Фие.5
Ц3иг.6
Составитель А.Филиппова Редактор О,Головач Техред М.Ходанич Корректор Л.Бескид
Заказ 7424/2
Тираж 470
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
Подписное
| Устройство порционного кормления животных | 1981 |
|
SU1083986A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
