Изобретение относится к сельскому хозяйству, к области промышленного и селекционного животноводства.
Цель изобретения - повышение оперативности управления.
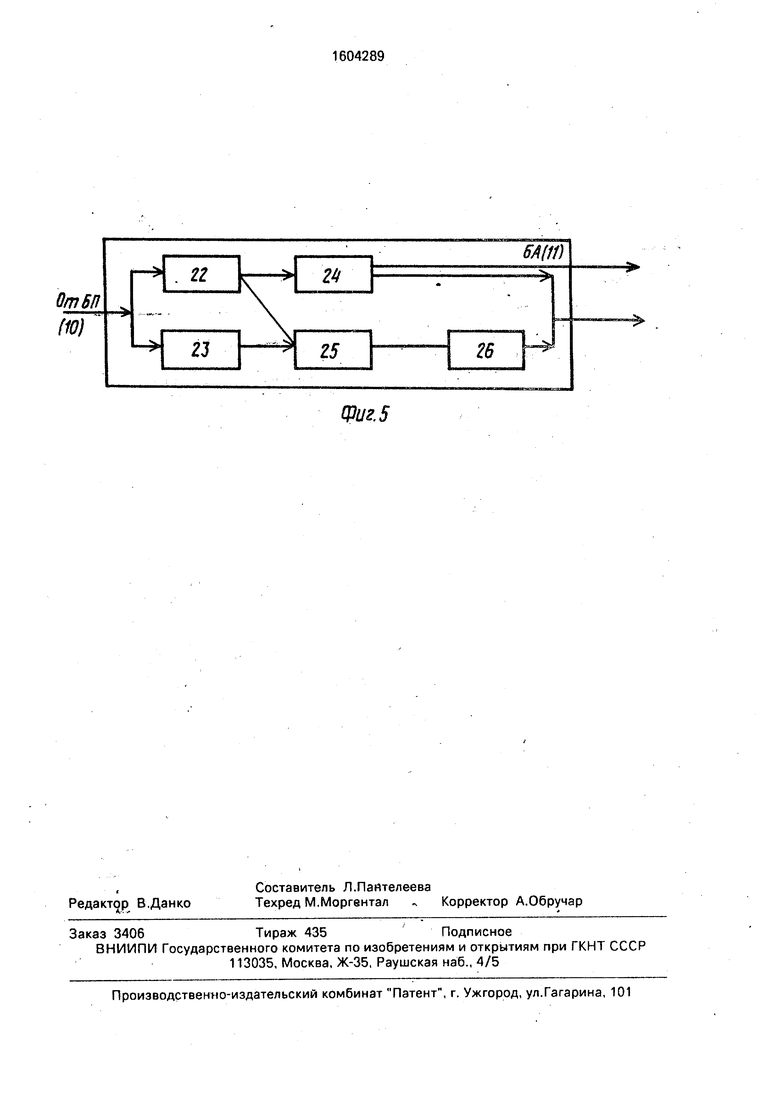
На фиг.1 представлена блок-схема устройства; на фиг.2 - блок-схема блока управления дозаторами; на фиг.З - блок-схема блока определения окончания кормления; на фиг.4 - блок-схема блока измерения объема остатка недоеденных кормов; на фиг.5 - блок-схема анализирующего блока.
Способ автоматизированного управления системой выпоенных аппаратов предусматривает идентификацию выпаемого животного, выдачу порции корма в соответствии с результатами идентификации, измерение объема остатка корма по окончании кормления животного, сравнение измеренной величины с допустимым значением объема остатка для данного животного и, при превышении по крайней мере для трех животных подряд допустимых значений остатка, оценивание состояния системы выполненных аппаратов как неудовлетворительного.
Зоотехнический смысл способа заключается в том, что молодняк сельскохозяйственных животных сосет рефлекторно, при этом происходит удовлетворение сосательного рефлекса и чувства голода (есл и при сосании животному поступает корм). В том случае, если соска выпоечного устройства или же коммуникации от емкости с. кормом к соске забиты (т.е. сопротивление продвижению ЗЦМ затруднено), то животное, удовлетворив сосательный рефлекс и частично чувство голода, получает меньше корма, чем должно было бы при нормальном состоянии соски и коммуникаций. При зтом в устройстве остается некоторая часть корма, не высосанная животным, остаток.
Для одного животного возможны отклонения от нормального состояния в частности из-за заболевания, т.е. причины оставления части корма животным могут быть и не связаны с неудовлетворительным состоянием устройства для выпойки, но случайное оставление части корма двумя, а тем более тремя животными подряд крайне маловероятно. Таким образом, если для трех или более животных подряд остаток недоеденной ими порции корма будет более допустимого, можно с большой степенью вероятности идентифицировать это как неудовлетворительное состояние системы выпойки молодняка животных, например забивание выпускного отверстий соски, коммуникаций и т лУстройство содержит блок 1 идентификации выпаиваемых животных, блок 2 управления дозаторами кормов, блок 3 определения окончания кормления, блок 4 5 измерения объема остатка недоеденных кормов, дозаторы 5 и 6. блок 7 определения отношения объема остатка кормов и выданной животному порции корма, блок 8 задания допустимых значений этого отношения.
0 блок 9 сравнения, блок 10 памяти, выполненный в виде стека, анализирующий блок 11. блок 12 оповещения, блок 13 управления механизмами, причем выходы блока 1 связаны с входами блоков 2. 3 и 8. вход блока 4
5 связан с выходом блока 3. а выходы - с входами блоков 2 и 7. выходы блока 2 связаны с дозаторами 5.6 и входом блока 7. входы блока 9 - с выходами блоков 7 и 8. вход блока 10-с выходом блока 11. выходы блока
0 11-с входами блоков 12 и 13.
Блок 2 управления дозаторами 5, 6 включает блок 14 задания доз(БЗД). блок 15 определения объема выдачи корма (БО ОВ) и блок 16 выработки управляющего сигнала.
5 Вход блока 14 связан с выходом блока 1, а выходы блока 14 - с входами блоков 7 и 15. Вход блока 15 связан с выходом блока 4 (БИО), а выход - с входом блока 16. Выходы блока 16 связаны с входами дозаторов.
0 Блок 14 задания доз - это блок памяти, выдающий по запросам от блока идентификации объемы доз, заданные для идентифи- цированных животных. Блок 15 определения объема выдачи - это арифме5 тический блок, определяющий разность между положенной животному дозой (поступает от БЗД 14) и имеющимся в кормушке остатком (поступает от БИО 4). Блок 16 выработки управляющего сигнала - это ин0 терфейс, преобразующий сигнал, поступающий от БООВ 15 в аналоговый сигнал, пригодный для управления механизмами дозаторов 5. 6.
Блок 1 идентификации животных - это
5 детекторное устройство, которое при при- , ближении к нему на заданное расстояние входит в бесконтактное (чаще применяется электромагнитное) взаимодействие с меткой, на животном (чаще всего у КРС - ошей0 ник с вмонтированной в него пластиной - меткой, несущей магнитный код). По характеристикам взаимодействия определяется номер животного.
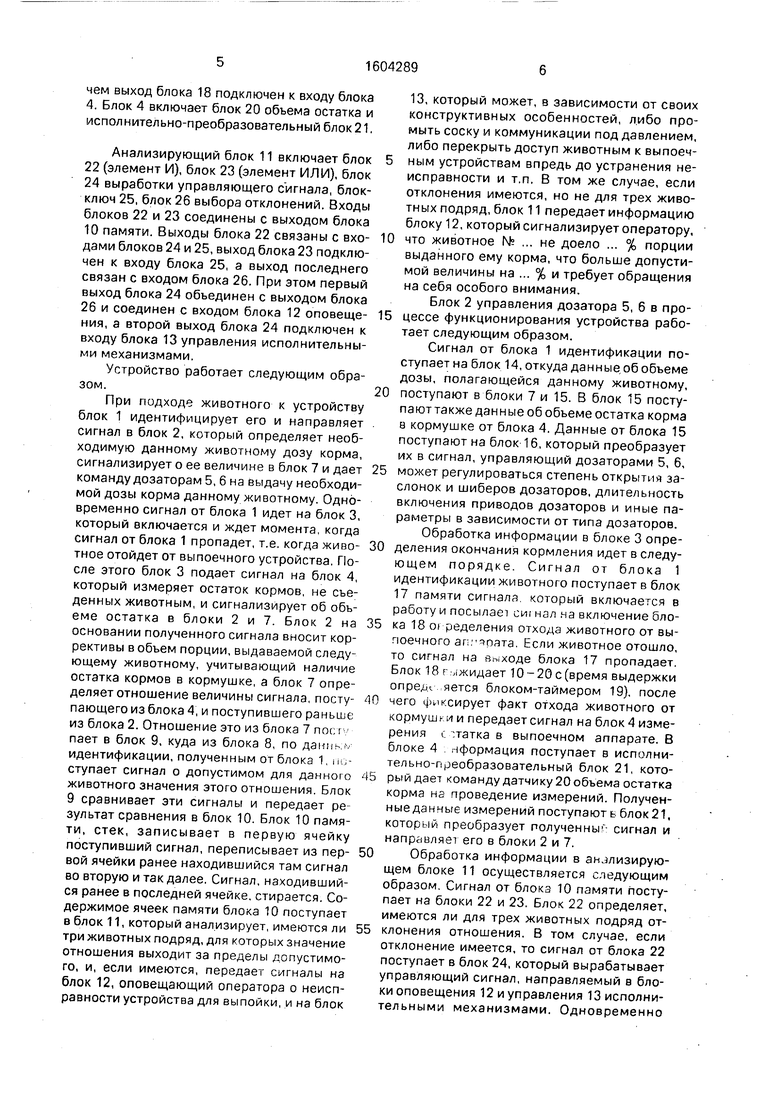
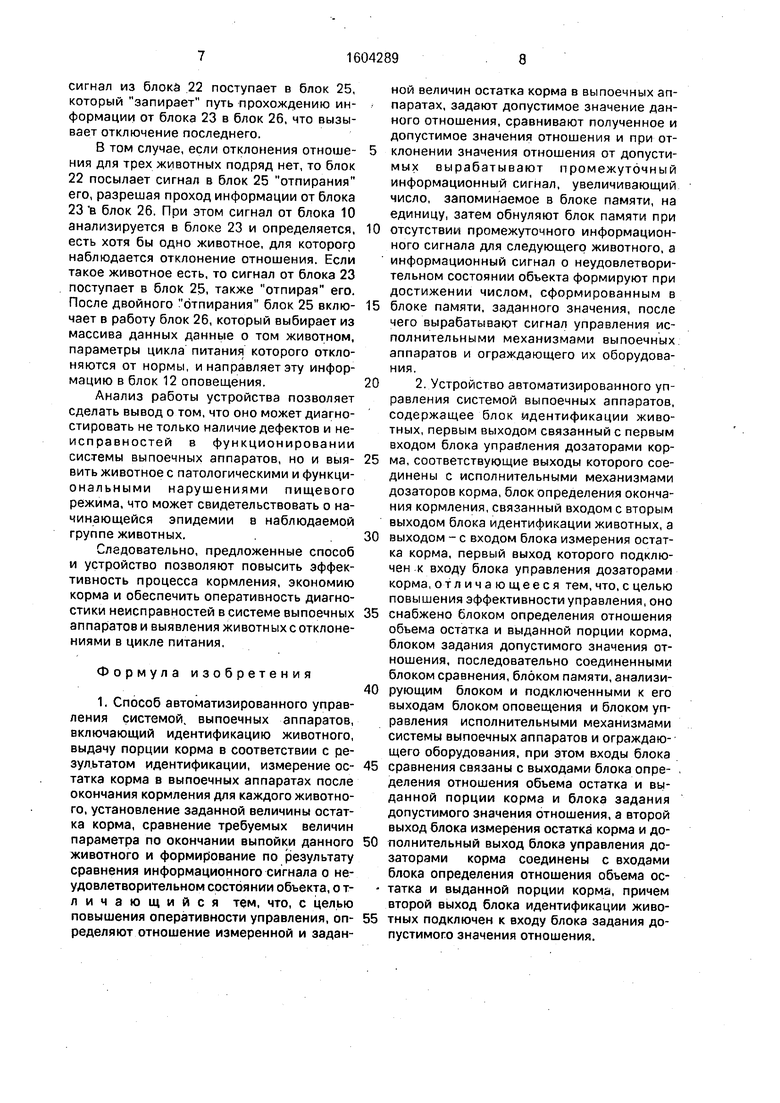
Блок 3 определения окончания кормле5 ния включает в себя блок 17 наличия сигнала, блок 18 определения отхода животного . от выпоечного аппарата м блок-таймер 19. при этом входы блока 18 соединены с выходами блоков 17 и 19, а вход блока 17 связан с соответствующим выходом блока 1. причем выход блока 18 подключен к входу блока 4. Блок 4 включает блок 20 обьема остатка и исполнительно-преобразовательный блок 21,
Анализирующий блок 11 включает блок 22 (элемент И), блок 23 (элемент ИЛИ), блок 24 выработки управляющего сигнала, блок- ключ 25, блок 26 выбора отклонений. Входы блоков 22 и 23 соединены с выходом блока 10 памяти. Выходы блока 22 связаны с входами блоков 24 и 25, выход блока 23 подключен к входу блока 25, а выход последнего связан с входом блока 26. При этом первый вь1ход блока 24 обьединен с выходом блока 26 и соединен с входом блока 12 оповещения, а второй выход блока 24 подключен к входу блока 13 управления исполнительными механизмами.
Устройство работает следующим образом.
При подходе животного к устройству блок 1 идентифицирует его и направляет сигнал в блок 2, который определяет необходимую данному животному дозу корма сигнализирует о ее величине в блок 7 и дает команду дозаторам 5, 6 на выдачу необходимой дозы корма данному животному Одновременно сигнал от блока 1 идет на блок 3 который включается и ждет момента, когда сигнал от блока 1 пропадет, т.е. когда животное отойдет от выпоечного устройства После этого блок 3 подает сигнал на блок 4 который измеряет остаток кормов, не съеденных животным, и сигнализирует об объеме остатка в блоки 2 и 7. Блок 2 на основании полученного сигнала вносит коррективы в объем порции, выдаваемой следующему животному, учитывающий наличие остатка кормов в кормушке, а блок 7 определяет отношение величины сигнала, поступающего из блока 4, и поступившего раньше из блока 2. Отношение это из блока 7 not т пает в блок 9, куда из блока 8, по даикк / идентификации, полученным от блока 1, поступает сигнал о допустимом для данного животного значения этого отношения. Блок 9 сравнивает эти сигналы и передает ре зулътат сравнения в блок 10. Блок 10 памяти, стек, записывает в первую ячейку поступивший сигнал, переписывает из первой ячейки ранее находившийся там сигнал во вторую и так далее. Сигнал, находившийся ранее в последней ячейке, стирается Содержимое ячеек памяти блока 10 поступает в блок 11, который анализирует, имеются ли три животных подряд, для которых значение отношения выходит за пределы допустимого, и, если имеются, передает сигналы на блок 12, оповещающий оператора о неисправности устройства для выпойки, и на блок
4 50
55
13, который может, в зависимости от своих конструктивных особенностей, либо промыть соску и коммуникации под давлением, либо перекрыть доступ животным к выпоеч5 ным устройствам впредь до устранения неисправности и т.п. В том же случае, если отклонения имеются, но не для трех животных подряд, блок 11 передает информацию блоку 12, который сигнализирует оператору
10 что животное № ... не доело ... % порции выданного ему корма, что больше допустимой величины на ... % и требует обращения на себя особого внимания.
Блок 2 управления дозатора 5, 6 в про15 цессе функционирования устройства работает следующим образом.
Сигнал от блока 1 идентификации поступает на блок 14, откуда данные, об объеме дозы, полагающейся данному животному 0 поступают в блоки 7 и 15. В блок 15 посту- паюттакже данные об объеме остатка корма в кормушке от блока 4. Данные от блока 15 поступают на блок 16, который преобразует их в сигнал, управляющий дозаторами 5, 6 5 может регулироваться степень открытия заслонок и шиберов дозаторов, длительность включения приводов дозаторов и иные параметры в зависимости от типа дозаторов. Обработка информации в блоке 3 опре- O деления окончания кормления идет в следующем порядке. Сигнал от блока 1 идентификации животного поступает в блок 17 памяти сигнала, который включается в работу и посылает CHI нал на включение бло- 5 ка 18 0( ределения отхода животного от выпоечного ап/ чоята. Если животное отошло то сигнал на выходе блока 17 пропадает Блок 18 г.,жидает10-20с(время выдержки опредл .яется блоком-таймером 19) после чего фиксирует факт отхода животного от
кормушки и передает сигнал на блок 4 измерения с :татка в выпоечном аппарате. В блоке 4 нформация поступает в исполнительно-преобразовательный блок 21, кото- рый дает команду датчику 20 объема остатка корма на проведение измерений. Получен- ныеданные измерений поступаютьблок21. который преобразует полученный: сигнал и направляет его в блоки 2 и 7. Обработка информации в анализирующем блоке 11 осуществляется следующим образом. Сигнал от блока 10 памяти поступает на блоки 22 и 23. Блок 22 определяет, имеются ли для трех животных подряд от- клонения отношения. В том случае, если отклонение имеется, то сигнал от блока 22 поступает в блок 24, который вырабатывает управляющий сигнал, направляемый в блоки оповещения 12 и управления 13 исполнительными механизмами. Одновременно
сигнал из блоки 22 поступает в блок 25. который запирает путь прохождению информации от блока 23 в блок 26. что вызывает отключение последнего.
В том случае, если отклонения отношения для трех животных подряд нет, то блок
22посылает сигнал в блок 25 отпирания его, разрешая проход информации от блока
23 в блок 26. При этом сигнал от блока 10 анализируется в блоке 23 и определяется, есть хотя бы одно животное, для которого наблюдается отклонение отношения. Если такое животное есть, то сигнал от блока 23 поступает в блок 25, также отпирая его. После двойного отпирания блок 25 включает в работу блок 26, который выбирает из массива данных данные о том животном, параметры цикла питания которого отклоняются от нормы, и направляет эту информацию в блок 12 оповещения.
Анализ работы устройства позволяет сделать вывод о том. что оно может диагностировать не только наличие дефектов и не- исправностей в функционировании системы выпоечных аппаратов, но и выявить животное с патологическими и функци- оиальными нарушениями пищевого режима, что может свидетельствовать о начинающейся эпидемии в наблюдаемой группе животных.
Следовательно, предложенные способ и устройство позволяют повысить эффективность процесса кормления, экономию корма и обеспечить оперативность диагностики неисправностей в системе выпоечных аппаратов и выявления животных с отклонениями в цикле питания.
Формула изобретения
1. Способ автоматизированного управления системой, выпоечных аппаратов, включающий идентификацию животного, выдачу порции корма в соответствии с ре- зул.ьтатом идентификации, измерение остатка корма в выпоечных аппаратах после окончания кормления для каждого животного, установление заданной величины остатка корма, сравнение требуемых величин параметра по окончании выпойки данного животного и формирование по результату сравнения информационного сигнала о неудовлетворительном состоянии объекта, о т- личающийся тем, что, с целью повышения оперативности управления, определяют отношение измеренной и заданной величин остатка корма в выпоечных аппаратах, задают допустимое значение данного отношения, сравнивают полученное и допустимое значения отношения и при от- 5 клонении значения отношения от допустимых вырабатывают промежуточный информационный сигнал, увеличивающий число, запоминаемое в блоке памяти, на единицу, затем обнуляют блок памяти при
0 отсутствии промежуточного информационного сигнала для следующего животного, а информационный сигнал о неудовлетворительном состоянии объекта формируют при достижении числом, сформированным в
5 блоке памяти, заданного значения, после чего вырабатывают сигнал управления исполнительными механизмами выпоечных аппаратов и ограждающего их оборудования.
0 2. Устройство автоматизированного управления системой выпоечных аппаратов, содержащее блок идентификации животных, первым выходом связанный с первым входом блока управления дозаторами кор5 ма, соответствующие выходы которого соединены с исполнительными механизмами дозаторов корма, блок определения окончания кормления, связанный входом с вторым выходом блока идентификации животных, а
0 выходом - с входом блока измерения остатка корма, первый выход которого подключен к входу блока управления дозаторами корма, отличающееся тем, что, с целью повышения эффективности управления, оно
5 снабжено блоком определения отношения объема остатка и выданной порции корма, блоком задания допустимого значения отношения, последовательно соединенными блоком сравнения, блоком памяти, анализи0 рующим блоком и подключенными к его выходам блоком оповещения и блоком управления исполнительными механизмами системы выпоечных аппаратов и ограждающего оборудования, при этом входы блока
5 сравнения связаны с выходами блока опре- , деления отношения объема остатка и вь|- данной порции корма и блока задания допустимого значения отношения, а второй выход блока измерения остатка корма и до0 лолнительный выход блока управления дозаторами корма соединены с входами блока определения отношения объема ос- татка и выданной порции корма, причем второй выход блока идентификации живо5 тных подключен к входу блока задания допустимого значения отношения.
Gm 5лOffal
(отбЮ
К 60011} 0т 6HO(ii}
Фиг. г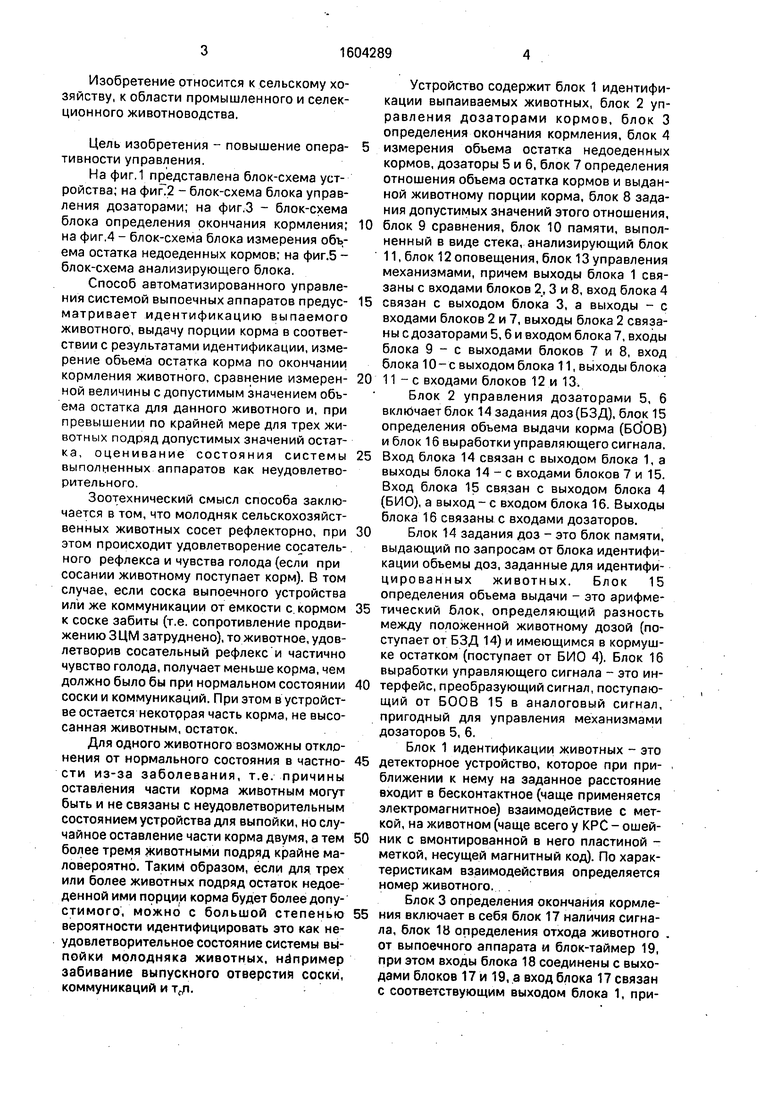
Изобретение относится к сельскому хозяйству, к промышленному и селекционному животноводству. Цель изобретения - повышение оперативности управления. Животное подходит к вторичному устройству, блок 1 идентифицирует его, блок 2 определяют необходимую ему дозу корма и дает команду на ее выдачу дозатором 5,6, когда кормление заканчивается и животное отходит от выпоечного аппарата, блок 4 определяет объем остатка корма, а блок 7 сравнивает его с объемом выданной дозы. Блок 9 сравнения определяет, находится ли отношение этих величин в допустимых пределах и передает результат в блок 10 памяти, хранящий данные, относящиеся к последним животным. По этим данным анализирующий блок 11 определяет, превышены ли допустимые значения для трех животных подряд и, если да, передает сигнал на блок 12, который оповещает оператора о неисправном состоянии системы выпойки. Если зафиксировано отклонение отношения лишь для одного животного, то диагностируется факт отключения у него пищевого режима и оператор оповещается о данном животном. 2 з.п. ф-лы, 5 ил.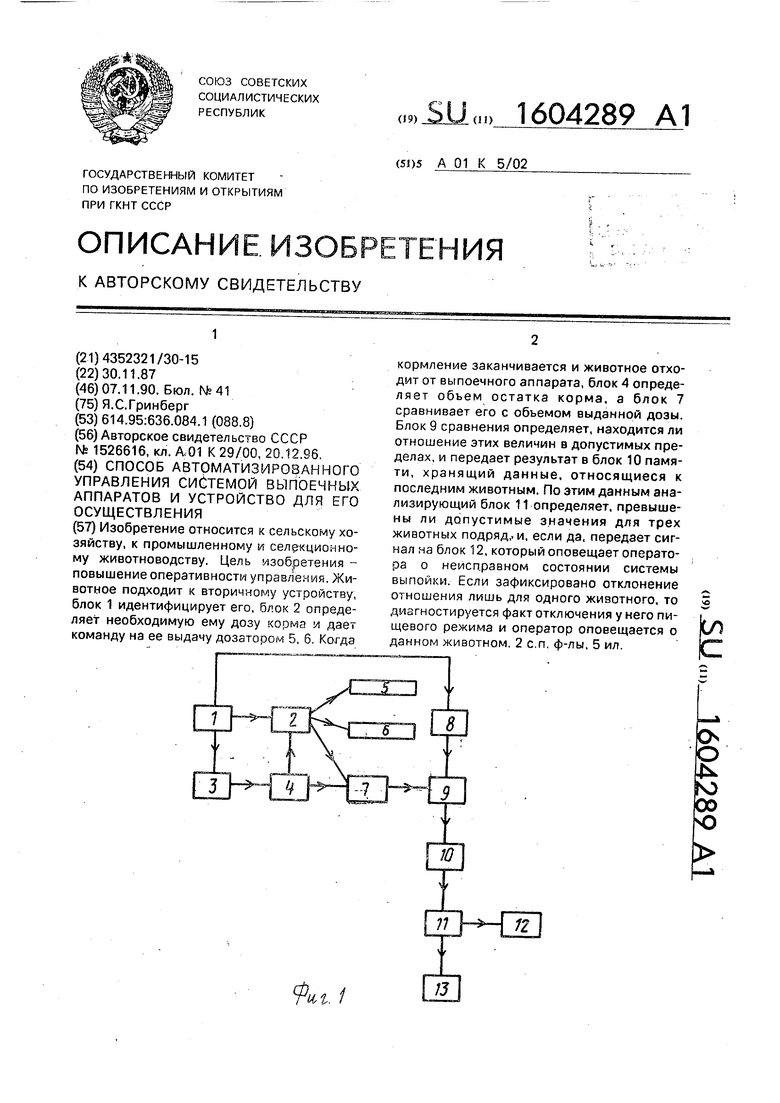
Фиг.
риг.5
| Устройство автоматизированной оценки физиологического состояния животных в процессе кормления | 1986 |
|
SU1526616A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
