Изобретение относится к области электротехники и может быть использовано в системах автоматического управления для регулирования частоты вращения электродвигателя постоянного тока.
Цель изобретения - упрощение устройства при обеспечении высокой надежности r.v«. Расставлена функциональная схема электропривода; на фиг. 2 - временные диаграммы, поясняющие его работу на
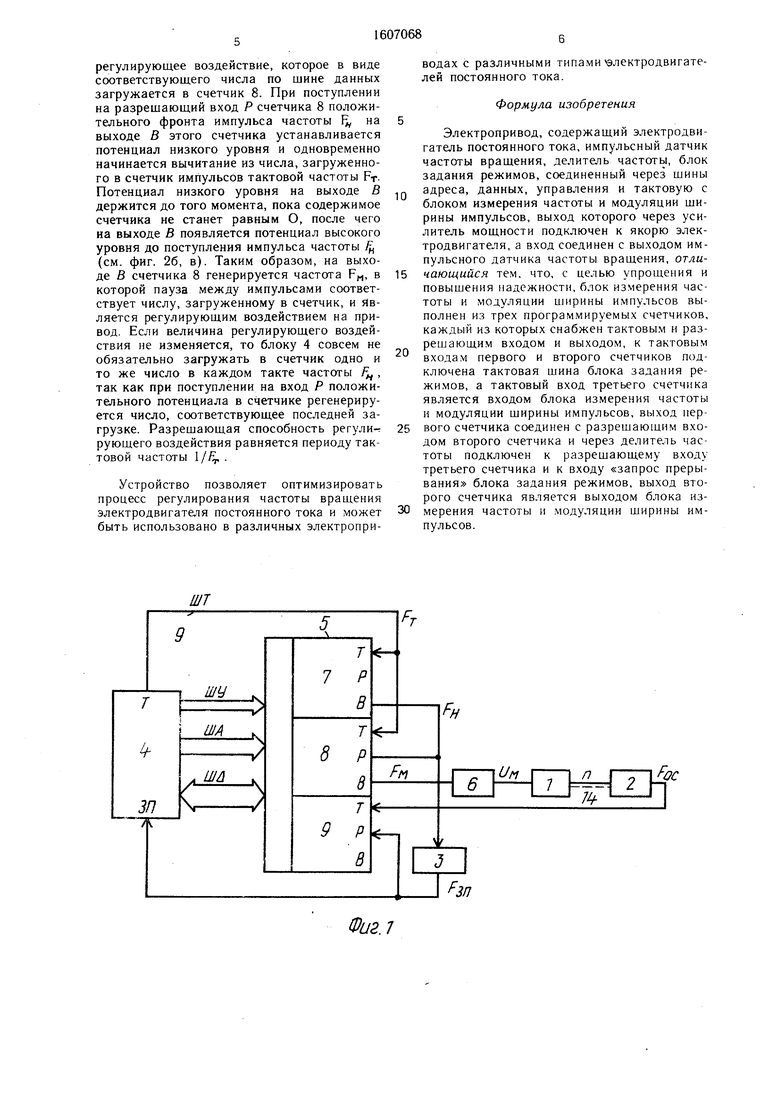
п стоян огГтГ.™ Двигате:.ем Электропривод- содержит электродвигатель 1, импульсный датчик 2 частоты вращения, делитель 3 частоты, блок 4 задания
режимов, соединенный через шины адреса даннь1х, управления и тактовую с бло- ком 5 измерения частоты и модуляции ширины импульсов, выход которого через усилитесь 6 мощности соединен с якорем электродвигателя 1, а вход - с импульсным датчиком 2 частоты вращения. Блок 5 измерения частоты и модуляции ширины импульсов содержит три счётчика 7-9. Тактовые входы первого и второго счетчиков 7 и 8 соединены с тактовой шиной блока 4 Выход счетчика 7 соединен с разрешающим вхо дом счетчика 8 и через делитель 3 частоты с разрешаюшим входом счетчика 9 и входом «Запрос прерывания блока 4. Тактовый
05
00
вход счетчика 9 является входом, а выход счетчика 8 является выходом блока 5.
Блок 4 может быть выполнен на базе микропроцессора КР580ВМ80, а блок 5 на микросхеме КР580ВИ53. Схема взаимопод- ключения этих устройств стандартна.
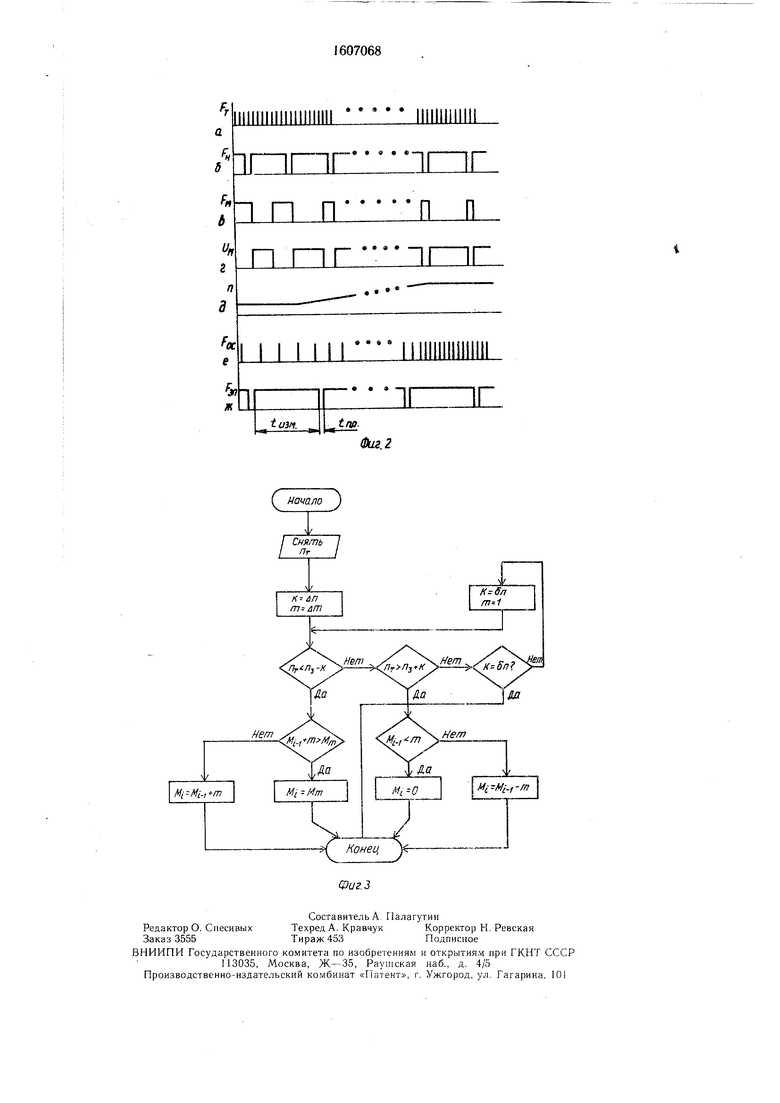
В алгоритме (фиг. 3) приняты следующие обозначения: пз - заданное значение Гастоты вращения; п, - текущее значение частоты вращения-, k. m - переменные программирования; А - полузона контура грубого регулирования; 6 - полузона кон- -тура точного регулирования; ЛМ - приращение регулирующего воздействия, опреде- Гяемое реализацией; М,„ М. - регулирую- щее воздействие, устанавливаемое в преды- дущем и текущих циклах; Mm - максималь- :ное значение регулирующего воздействия, {устанавливаемое для данного значения несу1щей частоты ц .,
Предельная точность регулирования бу- пет определяться максимальной частотой вращения привода, разрещающей способностью регулирующего воздействия и несущей частотой модуляции и подсчитывается по формуле
„Пт . Р„
±б„
„еб - предельная точность регулирования; п,„ - максимальная частота вращения
привода;ор.
F« - несущая частота модуляции; F - тактовая частота. Устройство работает следующим обра° При инициализации системы блок 4 в сответствии с алгоритмом (фиг. 3) выпол- яет следующие операции. Первый счет- ик 7 программируется в режим генератора астоты и в него записывается число 1, равое численно коэффициенту деления
N ,40
ОУ
где F тактовая частота блока 4, в данном варианте равная 2 МГц; рг . несущая частота щиротно-импульН „ ,Л1111/ Т-Ч Т/ 11 Я
1-1 с V LU, с1 л -1 (.1 - 1 - I - - I.
сной модуляции постоянного тока, выбирается обычно в пределах 45 1 - 10 кГц в зависимости от типа электродвигателя.
Таким образо.м, данном случае чис- 10 N рассчитанное по указанной формуле,
1 A i О П
лежит в предела.х 2-Й) -2-iU .
Второй счетчик 8 программируется в режим ждущего мультивибратора и в него записывается число, ссхмветствующее регулирующему воздействии) на электропривод.
Третий счетчик 9 программируется в режим генератора частоты и в него записы- . вается число, равное максимальной емкости счетчика 65535 (в шестнадцатиричном ко -le РГРР) Так как на разрспшющии вход / первого счетчика 7 постояшк) подан потен
5
р.
40
45
.
циал высокого уровня, то по окончании инициализации он начинает работать как делитель тактовой частоты Р (см. фиг. га) на коэффициент N. На выход В этого счетчика поступает несущая частота модуляции РН (см. фиг. 26). Причем счетчик работает в автоматическом режиме, т. е. после окончания цикла счета он автоматически начинает его снова без вмещательства бло На выход В второго счетчика 8 ют модулированные по щирине импульсу, т, частота следования которых равна Рт-г (см. фиг. 2в), Ширина этих импульсов может
быть от О до ( - ). в зависимости от
частоты вращения электропривода.
Модулированный по щирине сигнал поступает на вход усилителя 6 мощности, с вь1хода которого на якорь электродвигателя 1 поступают импульсы напряжения иш, промодулированные в соответствии с входным сигналом (см. фиг. 2г). Напряжение питания усилителя мощности выбирается несколько больщим, чем необходимо для питания электродвигателя на максимальной частоте вращения, с тем, чтобы обеспечить необходимый запас на регулирование в переходных процессах. С валом электродвига- тепя 1 механически связан импульсный датчик 2 частоты вращения любого типа. В данном случае датчик 2 представляет собой оптопару, оптическая связь в которой прерывается с помощью обтюратора, сидящего на валу электродвигателя 1.
Импульсы датчика 2, частота следования которых Рос, пропорциональна частоте вращения (см. фиг. 2д, е), поступает на тактовый вход Т третьего счетчика 9, на разре- щающий вход Р которого подаются импульсы Ьм с выхода делителя 3 (см. фиг. 2ж). За время действия импульса -. в счетчике 9 происходит вычитание каждого импульса подаваемого на тактовый вход / с выхода датчика 2. ПРИ oKc: 4.:rnui импульса W. счет останавли;.-:г :я - :чиним фронт импульса являетсл ...:а -. ...г-сапрерыва- шя который запроса
прерываний 31 о.-,ока 4. Ир сигнала запрос.., прерывании блок 4 переходит в режим обработки программы прерывания в резу.,ьтате которой считывается число оставшееся в счетчике 9 по щине данных По окончании паузы t,,., длитааьность которой порядка нескольких микросекунд, MPoi-ecc измерения повторяется, так как чис- .0 Написанное в счетчике, автоматически в.н-станавливается при поступлении переднего фронта импульса Ь«.. Таким образом, иа основании хранящейся в памяти информации о заданной частоте вращения и полученной информации о действительной частоте вращения привода блок 4 по заранее заданному алгоритму вычисляет необходимое
регулирующее воздействие, которое в виде соответствующего числа по щине данных загружается в счетчик 8. При поступлении на разрещающий вход Р счетчика 8 положительного фронта импульса частоты Fji, на выходе В этого счетчика устанавливается потенциал низкого уровня и одновременно начинается вычитание из числа, загруженного в счетчик импульсов тактовой частоты FT. Потенциал низкого уровня на выходе В держится до того момента, пока содержимое счетчика не станет равным О, после чего на выходе В появляется потенциал высокого уровня до поступления импульса частоты (см. фиг. 26, в). Таким образом, на выходе В счетчика 8 генерируется частота F, в которой пауза между импульсами соответствует числу, загруженному в счетчик, и является регулирующим воздействием на привод. Если величина регулирующего воздействия не изменяется, то блоку 4 совсем не обязательно загружать в счетчик одно и то же число в каждом такте частоты F , так как при поступлении на вход Р положительного потенциала в счетчике регенерируется число, соответствующее последней загрузке. Разрещающая способность регули- рующего воздействия равняется периоду тактовой частоты 1// .
Устройство позволяет оптимизировать процесс регулирования частоты вращения электродвигателя постоянного тока и может быть использовано в различных электропри
водах с различными типами электродвигателей постоянного тока.
Формула изобретения
Электропривод, содержащий электродвигатель постоянного тока, импульсный датчик частоты вращения, делитель частоть, блок задания режимов, соединенный через шины адреса, данных, управления и тактовую с блоком измерения частоты и модуляции щи- рины импульсов, выход которого через усилитель мощности подключен к якорю электродвигателя, а вход соединен с выходом импульсного датчика частоты вращения, отличающийся тем. что, с целью упрощения и повышения надежности, блок измерения частоты и модуляции ширины импульсов выполнен из трех программируемых счетчиков, каждый из которых снабжен тактовым и разрешающим входом и выходом, к тактовым входам первого и второго счетчиков подключена тактовая щина блока задания режимов, а тактовый вход третьего счетчика является входом блока измерения частоты и модуляции ширины импульсов, выход первого счетчика соединен с разрешающим входом второго счетчика и через делитель частоты подключен к разрешающему входу третьего счетчика и к входу «запрос прерывания блока задания режимов, выход второго счетчика является выходом блока измерения частоты и модуляции ширины импульсов.

| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОПРОЦЕССОРНЫЙ ЭЛЕКТРОПРИВОД | 1998 |
|
RU2141164C1 |
| Устройство для записи-воспроизведения на магнитной ленте | 1986 |
|
SU1339635A1 |
| Устройство для измерения скольжения асинхронных электродвигателей | 1986 |
|
SU1345121A1 |
| Электропривод | 1987 |
|
SU1476584A1 |
| Электропривод | 1985 |
|
SU1275726A1 |
| Устройство для измерения разности частот вращения | 1986 |
|
SU1613959A1 |
| Устройство для измерения скорости вращения | 1984 |
|
SU1262385A1 |
| Устройство для поиска информации на магнитной ленте | 1986 |
|
SU1597912A1 |
| Устройство для пуска синхронной @ -фазной машины | 1990 |
|
SU1823119A1 |
| ТЕПЛОВИЗОР | 1991 |
|
RU2012155C1 |
Изобретение относится к электротехнике и может быть использовано в системах автоматического управления для регулирования частоты вращения электродвигателя постоянного тока. Цель изобретения состоит в упрощении и повышении надежности. Электропривод содержит делитель частоты и блок задания режимов, имеющий вход "запрос прерывания" и тактовую шину, подключенный к блоку измерения частоты и модуляции ширины импульса через адресную и управляющую шины, а также через шину данных, причем выход этого блока через усилитель мощности подключен к электродвигателю, связанному с импульсным датчиком частоты вращения. Блок измерения частоты и модуляции ширины импульса выполнен в из трех программируемых счетчиков, каждый из которых имеет тактовый и разрешающий входы и выход, к тактовым входам первого и второго счетчиков подключен блок задания режимов, к тактовому входу третьего счетчика подсоединен выход импульса датчика частоты вращения, выход первого счетчика непосредственно соединен с разрешающим входом второго счетчика и через упомянутый делитель частоты подключен к разрешающему входу третьего счетчика и к входу "запрос прерывания". Описанные элементы и связи позволяют оптимизировать процесс регулирования частоты вращения электродвигателя постоянного тока. 3 ил.
Фиг.1
С Начало )
/ Снять I I /
| Цифровой электропривод постоянного тока | 1981 |
|
SU1003282A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
