го
СП ts5
гл
00 р1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения скольжения асинхронных электродвигателей | 1986 |
|
SU1345121A1 |
| Устройство для измерения скольжения | 1988 |
|
SU1615617A1 |
| Устройство для измерения параметров вращения | 1986 |
|
SU1613960A1 |
| Устройство для измерения разности частот вращения | 1986 |
|
SU1613959A1 |
| Устройство для измерения скольжения | 1988 |
|
SU1658098A1 |
| Учебная установка по физике | 1991 |
|
SU1831716A3 |
| МИКРОПРОЦЕССОРНЫЙ ЭЛЕКТРОПРИВОД | 1998 |
|
RU2141164C1 |
| Цифровое устройство для управления машиной непрерывного литья заготовок | 1989 |
|
SU1632621A1 |
| Устройство для определения координаты локомотива | 1990 |
|
SU1832093A1 |
| Прецизионное сканирующее устройство | 1989 |
|
SU1714564A1 |
Изобретение относится к измерительной технике и позволяет осуществлять автоматизацию переключения диапазона измерений с учетом динами1 еских свойств объекта контроля и нормирование погрешности во всем рабочем диапазоне измерения скорости вращения. После переключения структуры устройства на выходе OVT3 программи- руемого таймера 8 появляется-импульс, вызывающий прерывание микропроцессора 12 через блок 9 приоритетных прерываний (БПП) по входу ЗПРО. Интервалы времени от одного запроса до другого являются фиксированными интервалами измерения. Так как вход ЗПР7 БПП 9 разблокирован, то в этом S режиме он используется для подсчета (Л импульсов с выхода датчика 4 угловой скорости за интервал времени квантования, определяемый выходом программируемого таймера 8. По окончании первого эталонного интервала в зара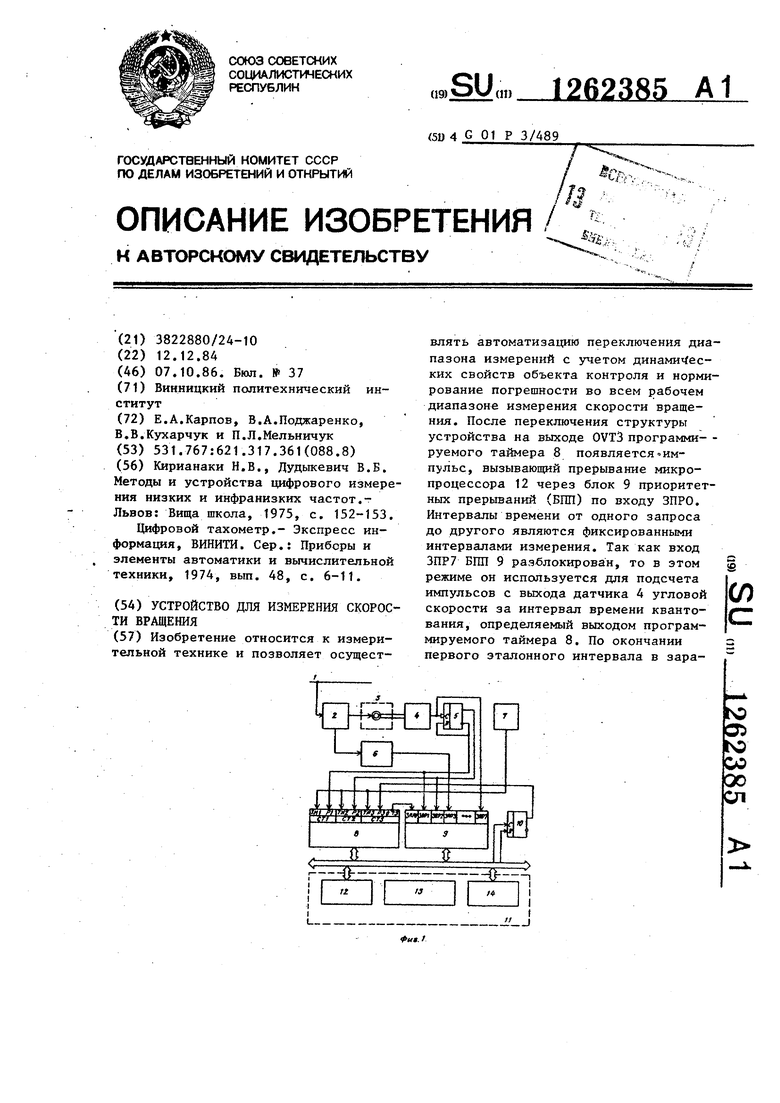
I
.J
1262385
нее определенной ячейке запоминающего 3tIP7 БПП 9. Процесс измерения происустройства 13 зафиксируется количест- ходит до тех пор, пока содержимое во импульсов, поступивших на вход счетчика не станет равным нулю. 3 ил.
«
Изобретение относится к измерительной технике и может быть использовано в системах регулирования, стабилизации и измерения скорости вращения,
Цель изобретения - автоматизация переключения диапазона измерений с учетом динамических свойств объекта контроля, а следовательно, нормирования погрешности во всем рабочем диапазоне измерения скорости вращения.
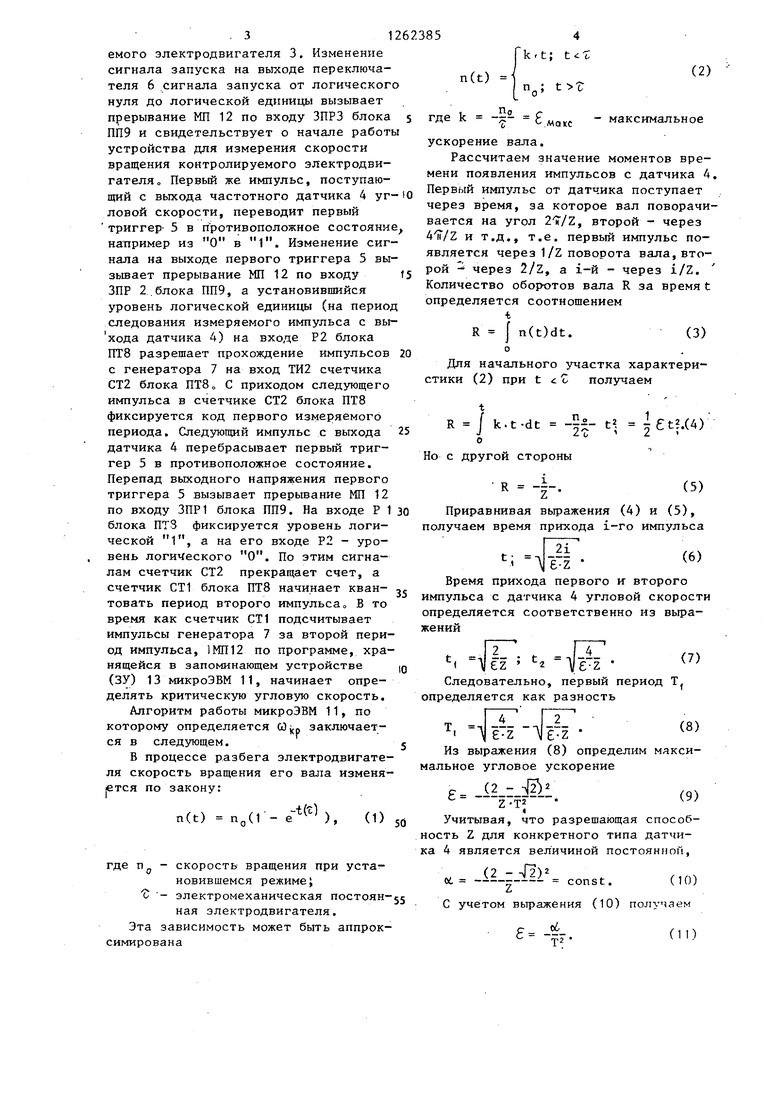
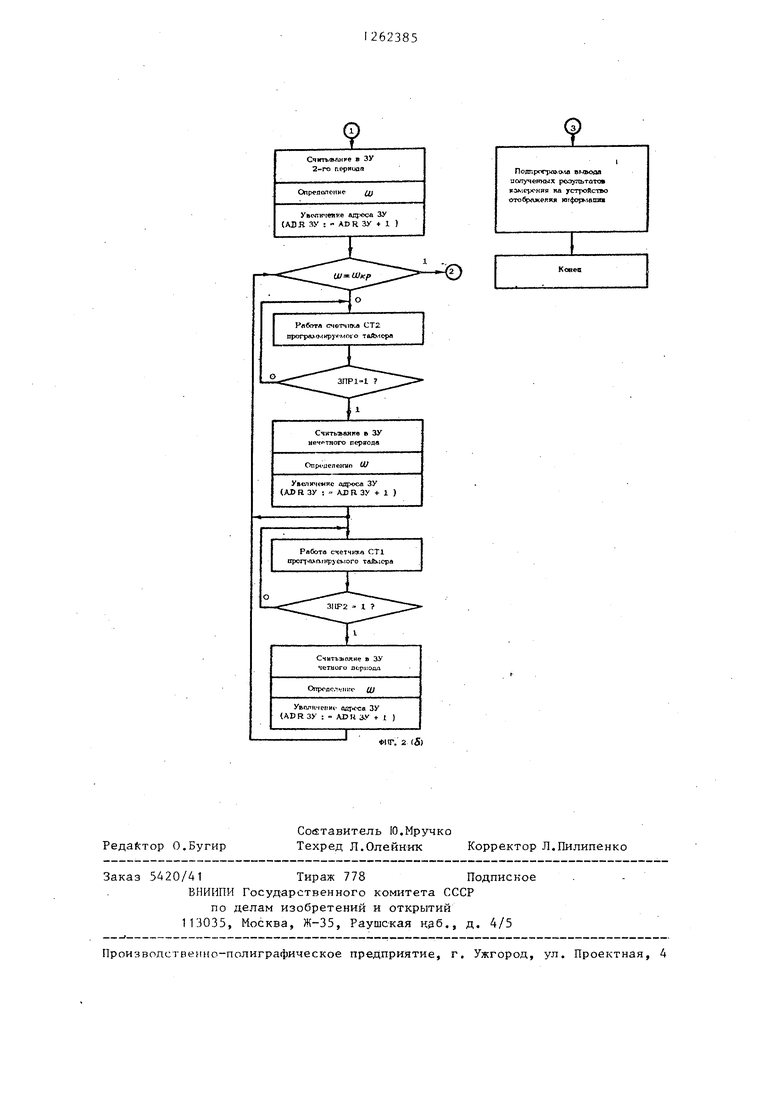
На фиг.1 представлена структурная схема предлагаеь ого устройства, на фиг,2 - алгоритм работы устройства для измерения скорости вращения,
Устройство подключено к промышленной сети 1 напряжения и содержит контактор 2, контролируемый электродвигатель 3, датчик 4 угловой скорости, первый триггер 5, переключатель 6 сигнала запуска, генератор 7 опорной частоты, программируемый таймер 8, блок 9 приоритетных прерываний, второй триггер 10, микроэвм 11, состоящую из микропроцессора 12, запоминающего устройства 13, и устройство 14 отображения информации.
Вход контактора 2 подключен к сети 1 , а первый его выход соединен с входом переключателя 6 сигнала запуска, второй вьгход контактора 2 подключен к входу контролируемого электродвигателя 3, механически связанного с контроли руемым электродвигателем 3 Выход датчика 4 угловой скорости сое динен со счетным входом первого триггера 5 и с седьмьм входом (ЗПР7) запроса прерывания блока 9 приоритетных прерываний. Прямой выход .первого триггера 5 соединен с вторым входом запроса прерывания (3IIP2) блока 9 приоритетных прерываний и с вторым разрешающим входом (Р2) программируемого таймера 8, а инверсный его выхо соединен соответственно с первым вхо дом запроса (ЗПР1) прерывания и первым разрешающим входом (Р1) блока 9 приоритетных прерываний и программируемого таймера 8 и с D-входом первого триггера 5. Вьгход генератора 7 опорной частоты подключен к первомУ; второму и третьему входам (ТИ1, ТИ2 и ТИЗ) синхронизации программируемог таймера 8, третий выход (OVT3) программируемого таймера 8 подключен к нулевому входу запроса (ЗПРО) прерывания блока 9 приоритетных прерываний, а третий вход запроса, прерывани (ЗПРЗ) блока 9 приоритетных прерываний соединен с выходом переключателя 6 сигнала запуска. .Прямой выход второго триггера 10 подключен к третьем разрешающему (РЗ) входу программируемого таймера 8. К системной шине микроЭВМ 11, состоящей из микропроцессора 12, запоминающего устройства 13 и устройства 14 отображения информации подключены программируемый таймер 8, блок 9 приоритетных прерываний, информационный и стробирующие входы второго триггера 10.
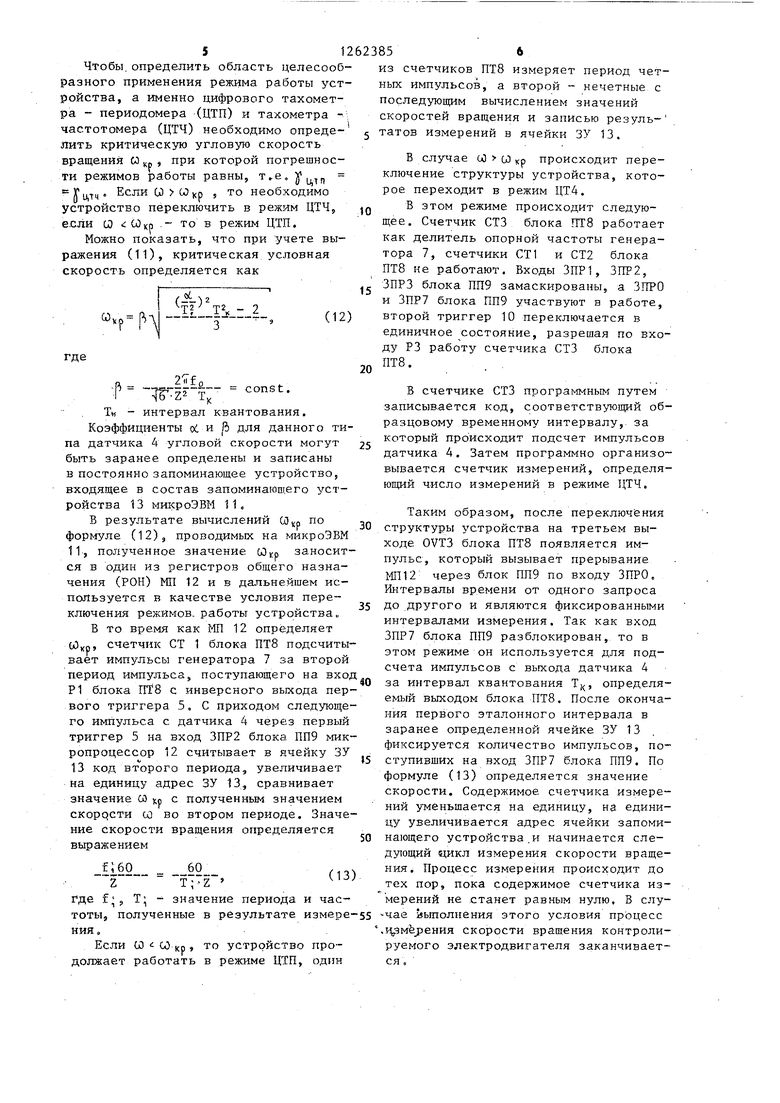
Предлагаемое устройство работает в соответствии, с алгоритмом, представленным на фиг.2.
При подаче напряжения питания на устройство микропроцессор (МП) 12 по программе иницианализации устанавливает режим тахометра - периодомера. При этом в программируемый таймер (ПТ) 8, блок 9 приоритетных прерываний (ПП) 9 записываются соответствующие управляющие слова, а второй триггер 10 устанавливается в .нулевое состояние. Микропроцессор 12 переходит в режим ожидания до появления сигнала на входе ЗПРЗ блока ПП9, Счетчики СТ1 и СТ2 ПТ8 в этом режиме работы 1 спользуются как счетчики событий, а счетчик СТЗ не работает. Входы ЗПРО и ЗПР7 блока ПП9 заблокированы (программным путем наложена маска, на эти разряды).
Работа устройства начинается по сигналу от переключателя 6 одновременно с подачей напряжения от сети 1 через контактор 2 на вход крнтролируемого электродвигателя 3. Изменение сигнала запуска на выходе переключателя 6 сигнала запуска от логическог нуля до логической единицы вызывает прерывание МП 12 по входу ЗПРЗ блока ПП9 и свидетельствует о начале работ устройства для измерения скорости вращения контролируемого электродвигателя Первый же импульс, поступающий с выхода частотного датчика 4 уг ловой скорости, переводит первый триггер- 5 в противоположное состояни наттример из О в 1. Изменение сиг нала на выходе первого триггера 5 вы зьшает прерывание МП 12 по входу ЗПР 2.блока ПП9, а установившийся уровень логической единицы (на перио следования измеряемого импульса с вы хода датчика 4) на входе Р2 блока ПТ8 разрешает прохождение импульсов с генератора 7 на вход ТИ2 счетчика СТ2 блока ПТ8„ С приходом следующего импульса в счетчике СТ2 блока ПТ8 фиксируется код первого измеряемого периода. Следующий импульс с выхода датчика 4 перебрасывает первый триггер 5 в противоположное состояние. Перепад выходного напряжения первого триггера 5 вызывает прерьшание МП 12 по входу ЗПР1 блока ПП9. На входе Р 1 блока ПТЗ фиксируется уровень логической 1, а на его входе Р2 - уровень логического О. По этим сигналам счетчик СТ2 прекращает счет, а счетчик СТ1 блока ПТ8 начинает квантовать период второго импульса В то время как счетчик СТ1 подсчитывает импульсы генератора 7 за второй период импульса, 1МП12 по программе, хранящейся в запоминающем устройстве (ЗУ) 13 микроэвм 11, начинает определять критическую угловую скорость. Алгоритм работы микроЭВМ 11, по которому определяется COj. заключается в следующем. В процессе разбега электродвигателя скорость вращения его вала изменяется по закону: n(t) n-d- ), где п - скорость вращения при установившемся режиме; о - электромеханическая постоян- ная электродвигателя. Эта зависимость может быть аппроксимированаk t; t сТ n(t) t По ,где к -;j- 1 - максимальное ускорение вала. Рассчитаем значение моментов времени появления импульсов с датчика 4. Первый импульс от датчика поступает через время, за которое вал поворачивается на угол 2ir/Z, второй - через H/Z и т.д., т.е. первый импульс повляется через 1/Z поворота вала, втоой - через 2/Z, а i-й - через i/Z. оличество оборотов вала R за время t пределяется соотношением t R n(t)dt.(3) Для начального участка характеритики (2) при t получаем jk.t.dt t. .(4) о с другой стороны R .(5) Приравнивая выражения (4) и (5), олучаем время прихода i-ro импульса Время прихода первого и второго мпульса с датчика 4 угловой скорости пределяется соответственно из выраенийгу- гу- Kz 5 Te-z Следовательно, первый период Т пределяется как разность Из выражения (8) определим максиальное угловое ускорение - . Учитывая, что разрешающая способость Z для конкретного типа датчиа 4 является величиной постоянной, 06 -i - -i2i const. (10) С учётом выражения (10) получаем е- р2 Чтобы.определить область целесооб разного применения режима работы уст ройства, а именно цифрового тахомет ра - периодомера (ДТП) и тахометра частотомера (ЦТЧ) необходимо определить критическую угловую скорость вращения со р , при которой погрешности режимов работы равны, т,е, . Если СО W ко , то необходимо устройство переключить в режим ЦТЧ, если CD то в режим ДТП. Можно показать, что при учете выражения (11), критическая условная скорость определяется как TL: . f -; const, Т - , Ти - интервал квантования. Коэффициенты oi и для данного ти па датчика 4 угловой скорости могут быть заранее определены и записаны в постоянно запоминающее устройство, входящее в состав запоминающего устройства 13 микроэвм 11, В результате вычислений С0,(р по формуле (12), проводимых на микроЭВМ 11, полученное значение заносит ся в один из регистров общего назначения (РОН) МП 12 и в дальнейшем используется в качестве условия переключения режимов, работы устройства„ В то время как МП 12 определяет СдЭхр счетчик СТ 1 блока ПТ8 подсчиты вает импульсы генератора 7 за второ период импульса, поступающего на вх Р1 блока ПТ8 с инверсного выхода пер вого триггера 5, С приходом следующ го импульса с датчика 4 через первы триггер 5 на вход ЗПР2 блока ПП9 ми ропроцессор 12 считывает в ячейку З 13 код второго периода., увеличивает на единицу адрес ЗУ 13., сравнивает значение со м с полученным значением скоррсти со во втором периоде. Знач ние скорости вращения определяется выражением f;6o бо Z где f, Т; - значение периода и час тоты, полученные в результате измер кия. Если СО СО ко то устройство продолжает работать в реж:нме ДТП, один з счетчиков ПТ8 измеряет период четых импульсов, а второй - нечетные с оследующим вычислением значений коростей вращения и записью резульатов измерений в ячейки ЗУ 13. В случае СО сО кр происходит переключение структуры устройства, которое переходит в режим ЦТ4. В этом режиме происходит следующее. Счетчик СТЗ блока ПТ8 работает как делитель опорной частоты генератора 7, счетчики СТ1 и СТ2 блока ПТ8 не работают. Входы ЗПР1, 3IIP2, ЗПРЗ блока ПП9 замаскированы, а ЗПРО и ЗПР7 блока ПП9 участвуют в работе, второй триггер 10 переключается в единичное состояние, разрешая по входу РЗ работу счетчика СТЗ блока ПТ8. В счетчике СТЗ программным путем записывается код, соответствующий образцовому временному интервалу, за который происходит подсчет импульсов датчика 4. Затем программно организовывается счетчик измерений, определяющий число измерений в режиме ЦТЧ, Таким образом, после переключения структуры устройства на третьем выходе OVT3 блока ПТ8 появляется импульс, который вызывает прерывание Mil 12 через блок ПП9 по входу ЗПРО. Интервалы времени от одного запроса до .другого и являются фиксированными интервалами измерения. Так как вход ЗПР7 блока ПП9 разблокирован, то в этом режиме он используется для подсчета импульсов с выхода датчика 4 за интервал квантования Т, определяемый выходом блока ПТ8. После окончания первого эталонного интервала в заранее определенной ячейке ЗУ 13 фиксируется количество импульсов, поступивших на вход ЗПР7 блока ПП9, По формуле (13) определяется значение скорости. Содержимое счетчика измерений уменьшается на единицу, на единицу увеличивается адрес ячейки запоминающего устройства.и начинается следующий (ЦИКЛ измерения скорости вращения. Процесс измерения происходит до тех пор, пока содержимое счетчика измерений не станет равным нулю. В слу-чае Ььшолиения этого условия процесс ,ц,;змё рения скорости вращения контролируемого электродвигателя заканчивается.
Формула изобретения
Устройство для измерения скорости вращения, содержащее контактор, вход которого подключен к промышленной се ти, первый выход контактора соединен с входом переключателя сигнала запуска, а второй - к контролируемому электродвигателю, вал которого механически связан с датчиком угловой скорости, генератор опорной частоты, микроэвм, отличающееся тем, что, с целью автоматизации переключения диапазона измерений с учетом динамических свойств объекта контроля, в него дополнительно введены первый триггер, программируемый таймер, блок приоритетных прерываний и второй триггер, причем выход датчика угловой скорости соединен со счетным входом первого триггера и седьмым входом запроса прерывания блока приоритетных прерываний, прямой выход первого триггера соединен с вторьм входом запроса прерывания блока приоритетных прерываний и с вторым разрешающим входом программируемого тайме ра, а инверсный его выход соединен с первым входом запроса прерьшания блока приоритетных прерываний, первым разрешающим входом программируемого таймера и с D-входом первого триггера, выход генератора опорной частоты подключен к первому, второму и третьe fy входам синхронизации программируемого таймера, третий выход программируемого таймера подключен к нулевому входу запроса прерывания блока приоритетных прерываний, а третий вход запроса прерывания блока приоритетных прерываний соединен с выходом переключателя запуска, прямой выход второго триггера подключен к третьему разрешающему входу программируемого таймера, к системной шине микроЭВМ подключены программируемый таймер , блок приоритетных прерьг-: ваний , информационный и стро - бирующие входы второго триг - гера.
t
Устш1С кп режима ЦТП
Установка режю. UT4
Работа счетчика СТ2 Программируемого та&м(а
X
Установка вталоккого временного кнтероопа намерен.
Устаясвка счетчика измор.
Подсчет КС1П.-ВП га пупъсов аа эталон. времшшоН ннтер.
Считывание в ЗУ 1-го периода
Определение Ш
Увгякчен«а адреса ЗУ (APR ЗУ : ADR ЗУ + 1)
Запись коп.-ва импульсов аа эталою1ый Bf«M«moft интервал в ячейку ЗУ -Определение 6У
Вычис-ление 0 кр и «лгредепение точки персхлючекня
режима работы устройства
Заломинакне W кр в РОН
Уоплячение адреса ЗУ (ADR ЗУ - АРЗУ + 1)
Работа счетчика СТ1 прся-раммируемого табмера
Кояеа нзмерелиЛ
ФигГа (л
Пош1рсграм7.1а выпода иаяучиткых розультато яэмгронвя на устройство отобрАжеяяя югфор шшш
Коееп
Опр целент1п td/
Ув€;лкчсикс адреса ЗУ (AJ R ЗУ : - AJ3 П ЗУ + i )
ФПГ. 2 Г5)
| Кирианаки Н.В., Дудыкевич В.Б | |||
| Методы и устройства цифрового измерения низких и инфранизких частот.Львов: Вища школа, 1975, с | |||
| Способ образования азокрасителей на волокнах | 1918 |
|
SU152A1 |
| Цифровой тахометр.- Экспресс информация, ВИНИТИ | |||
| Сер.: Приборы и элементы автоматики и вычислительной техники, 1974, вьш | |||
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
