Изобретение относится к машиностроению и может быть использовано в устройствах для преобразования вращательного двг жения в возвратно-поступательное и наоборот.
- Цель изобретения-улучшение массога- баритных показателей.
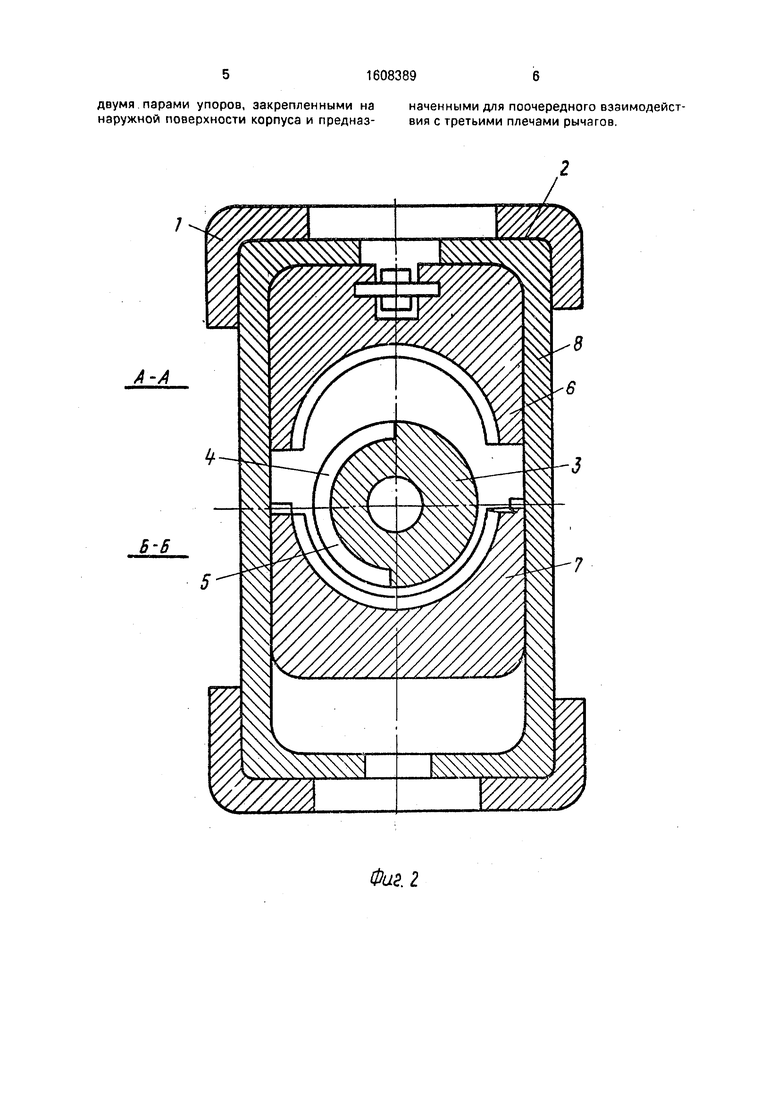
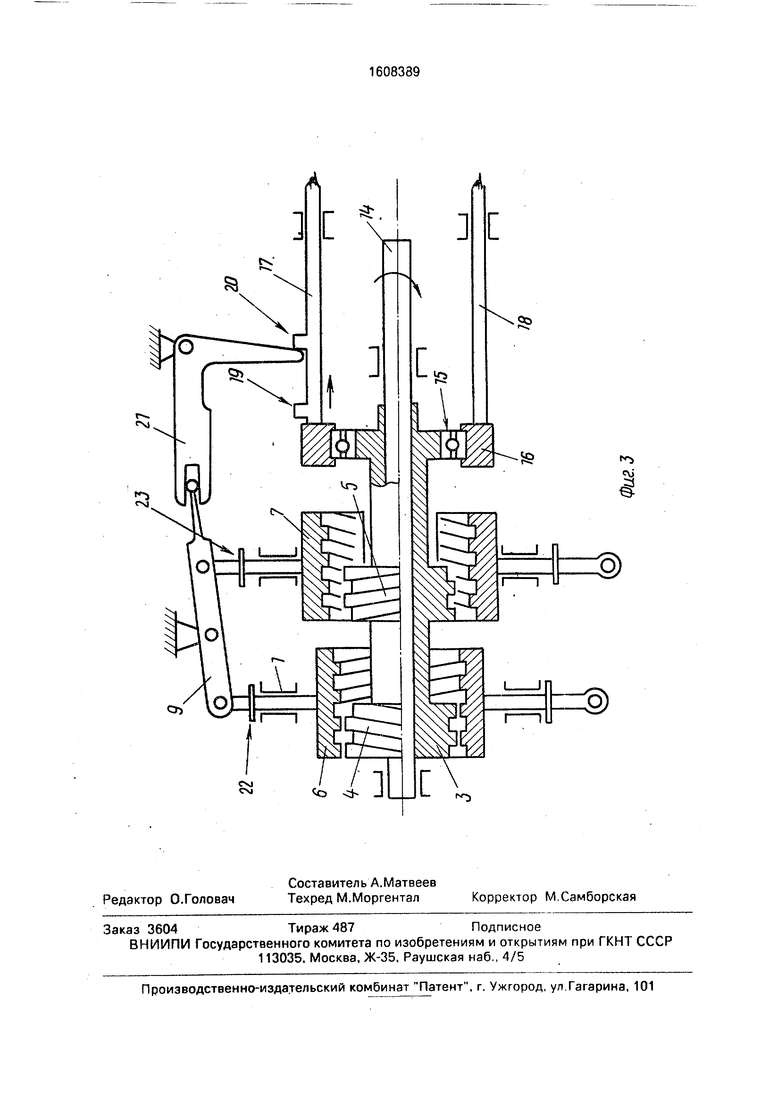
На фиг.1 изображен магнитный преобразователь движения, продольный разрез; на фиг,2 - разрезы А-А и Б-Б на фиг.1; на фиг.З - вариант выполнения магнитного преобразователя движения.
Магнитный преобразователь движения содержит корпус 1 с направляющими 2, установленный в корпусе винт 3 из магнито- мягкого материала с двумя участками 4 и 5 нарезки противоположного направления и взаимодействующие с соответствующими участками нарезки две гайки 6 и 7 из магни- тотвердого материала с радиальной намагниченностью. Каждая гяйка выполнена из двух секторов (фиг.2).
Сектора гаек 6 и 7 установлены в обойме 8 с возможностью радиального перемещения. Обойма 8 установлена в направляющих 2 корпуса 1 с возможностью осевого перемещения. В обойме 8 шарнир- но закреплены два трехплечих рычага 9, шарнирно связанные с секюрами гаек 6 и 7 при помощи плеч рычагов, расположенных на одной оси. Третье плечо каждого рычага
9взаимодействует поочередно с упорами
10и 11 (12 и 13), жестко закрепленными на наружной поверхности корпуса 1.
Вариант исполнения магнитного преобразователя движения (фиг.З) отличается тем, что винт 3 имеет возможность перемещения по шлицам вала 14. На конце винта 3 установлен подшипник 15, на котором закреплено кольцо 16, а к нему прикреплены штоки 17 и 18, установленные в направляющих корпуса 1. На штоках 17 и 18 укреплены упоры 19 и 20, при помощи которых посредством рычагов 21 и 9 производится противофазное перемещение соответствующих секторов гаек 6 и 7 относительно винта 3. Перемещение секторов гаек 6 и 7 ограничивается упорами 22 и 23.
Магнитный преобразователь движения работает следующим образом.
В положении, показанном на фиг.1, пара секторов гайки 6 находится в сдвинутом положении и имеет минимальный зазор между секторами и участком 4 нарезки винта 3 и максимальный магнитный поток.
В это время сектора гайки 7 раздвинуты в радиальном направлении относительно участка 5 нарезки винта 3 и имеют максимальный зазор, а следовательно, минимальный магнитны й поток. При вращении винта 3 происходит перемещение обоймы 8 с секторами в сторону упоров 10.И 12 до упора в них третьими плечами рычагов 9. В результате этого происходит поворот рычагов 9, отчего зазор между секторами гайки 6 увеличивается, а между секторами гайки 7 уменьшается. При этом магнитные потоки по винтовым парам перераспределятся: у
пары гайка 6 - участок 4 винта 3 он становится минимальным, а у пары гайка 7 - участок 5 - максимальным. При этом обойма 8 двигается в обратном направлении, так как резьба на участке 5 имеет другое направление до упора третьими плечами рычагов 9 в упоры 11 и 13. После этого цикл движения обоймы 8 повторяется в описанной последовательности.
Аналогично работает преобразователь
движения, изображенный на.фиг.З (вариант).
При вращении вала 14 происходит осевое перемещение винта 3 в том или другом направлении в зависимости от того, какая
магнитная пара в-данный момент является рабочей, т.е. именно та, у которой минимальный зазор и максимальный магнитный поток. Перемещающийся в осевом направлении винт 3 через подшипник 15 с кольцом
16 перемещает штоки 17 и 18, а они за счет упоро 19 и 20 и рычагов 21 и 9 сдвигают одни и раздвигают другие сектора гаек 6 и 7. Преобразователь может преобразовывать возвратно-поступательное движение
во вращательное, т.е. является обратным.
Формула изобретения
Магнитный преобразователь движения,
содержащий корпус с направляющими, установленный в корпусе винт из магнитомяг- кого материала с двумя участками нарезки противоположного направления и взаимодействующие с соответствующими участками нарезки гайки из могнитотвердого материала с радиальной намагниченностью, отличающийся тем, что, с целью улучшения массогабаритных показателей, каждая гайка выполнена из двух одинаковых секторов, а преобразователь снабжен обоймой, установленной в направляющих корпуса и предназначенной для размещения в ней гаек с возможностью перемещения их секторов в радиальном направлении,
двумя трехплечими рычагами, два плеча каждого из которых лежат на одной оси, шарнирно закрепленными в обойме между соответствующими секторами разных гаек и шарнирно связанными с секторами при помощи плеч, расположенных на одной оси, и
516083896
двумя, парами упоров, закрепленными на наченными для поочередного взаимодейст- наружной поверхности корпуса и предназ- вия с третьими плечами рычагов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь движения | 1985 |
|
SU1295104A1 |
| Барабан для сборки покрышек пневматических шин | 1971 |
|
SU452953A3 |
| Преобразователь движения | 1987 |
|
SU1490367A1 |
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ СЕКТОРНОГО ДОРНА ИЗ ЛИТОЙ ПОКРЫШКИ | 1988 |
|
SU1561400A1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ В ОДНОСТОРОННЕЕ ВРАЩАТЕЛЬНОЕ | 1994 |
|
RU2083895C1 |
| Устройство для раскладки нити на паковке | 1976 |
|
SU597621A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕРАБОТКИ ЗЕРНА | 1998 |
|
RU2137407C1 |
| Устройство для подачи материала | 1973 |
|
SU471939A1 |
| Устройство для резки невращающихся деталей | 1978 |
|
SU764879A1 |
| Расточная головка с радиальной подачей резца | 1973 |
|
SU458395A1 |
Изобретение относится к машиностроению и может быть использовано в устройствах для преобразования вращательного движения в возвратно-поступательное и наоборот. Цель изобретения - улучшение массогабаритных показателей. Указанная цель достигается за счет того, что гайки 6 и 7 выполнены каждая из двух одинаковых секторов из магнитотвердого материала, а винт 3 имеет участки 4, 5 нарезки противоположного направления, которые выполнены из магнитомягкого материала. Сектора гаек 6 и 7 имеют возможность поочередно сближаться или удаляться от участков 4, 5 нарезки винта 3. При этом работает транзистора винтовая магнитная пара, которая имеет минимальный воздушный зазор, а следовательно, максимальный магнитный поток. При вращении винта 3 обойма 8 будет совершать возвратно-поступательное движение. В крайних положениях обоймы 8 происходит взаимодействие рычагов 9 с упорами 10 (12) или 11 (13), за счет чего происходит реверс движения обоймы 8. 3 ил.
Фи$.2
r
@
Ti
| Преобразователь движения | 1985 |
|
SU1295104A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
