(21
) А496645/24-2А
(71
(22) 19.10.88
(46) 23о11.90. Бюл. № 43
) Уфимский авиационный институт
(72) Л.Б. Ураэбахтина, Г.С. Бондарь и И.А.Глебов
(53)621.396 (088.8)
(56) Иванов iO.n. и др. Комплексирова- ние информационно-измерительных устройств летательных аппаратов. Л.: Машиностроение, 1984, с, 88, рис.3.4. Там же, с. 90, рис. 3.6.
(54)KO fflЛEKCHOE ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО С САМОКОНТРОЛЕМ
(57|) Изобретение относится к информационно-измерительной технике и может быть использовано в системах контроля параметров газотурбинных двигателей. Целью изобретения является повьшение точности измерения путем учета и контроля корреляционных характеристик погрешностей измерительных датчиков. Устройство содержит датчики 1, 2, блоки вычитания 3, вычисления параметров фильтра 5, сло- жения 7, коррелометр 4 и управляе- :мЬ1й фильтр 6. Устройство обеспечива- ет адаптивную подстройку управляемого фильтра, построение которого раскрыто, что позволяет получить оптимальную оценку измеряемого полезного сигнала в условиях нестационарного характера погрешностей комплексируе- мых измерительных датчиков. 2 ип.
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ФИЗИЧЕСКОЙ ВЕЛИЧИНЫ | 1994 |
|
RU2104495C1 |
| Корреляционный фильтр | 1982 |
|
SU1072251A1 |
| Стохастический коррелометр | 1988 |
|
SU1585808A1 |
| Коррелятор с аппроксимацией двух-пАРАМЕТРичЕСКиМи МОдЕляМи | 1978 |
|
SU807329A2 |
| ИЗМЕРИТЕЛЬ ВРЕМЕННОЙ ЗАДЕРЖКИ СИГНАЛОВ В ДИНАМИЧЕСКИХ СИСТЕМАХ | 1992 |
|
RU2118847C1 |
| Коррелометр | 1978 |
|
SU792265A1 |
| Корреляционное устройство для определения времени задержки | 1983 |
|
SU1101837A1 |
| МНОГОКАНАЛЬНЫЙ ЗНАКОВЫЙ КОРРЕЛОМЕТР | 1999 |
|
RU2177637C2 |
| Коррелометр с аппроксимацией ортогональными функциями Лагерра | 1984 |
|
SU1198547A1 |
| Коррелометр | 1979 |
|
SU842846A1 |
Изобретение относится к информационно-измерительной технике и может быть использовано в системах контроля параметров газотурбинных двигателей. Целью изобретения является повышение точности измерения путем учета и контроля корреляционных характеристик погрешностей измерительных датчиков. Устройство содержит датчики 1, 2, блоки вычитания 3, вычисления параметров фильтра 5, сложения 7, коррелометр 4 и управляемый фильтр 6. Устройство обеспечивает адаптивную подстройку управляемого фильтра, построение которого раскрыто, что позволяет получить оптимальную оценку измеряемого полезного сигнала в условиях нестационарного характера погрешностей комплексируемых измерительных датчиков. 2 ил.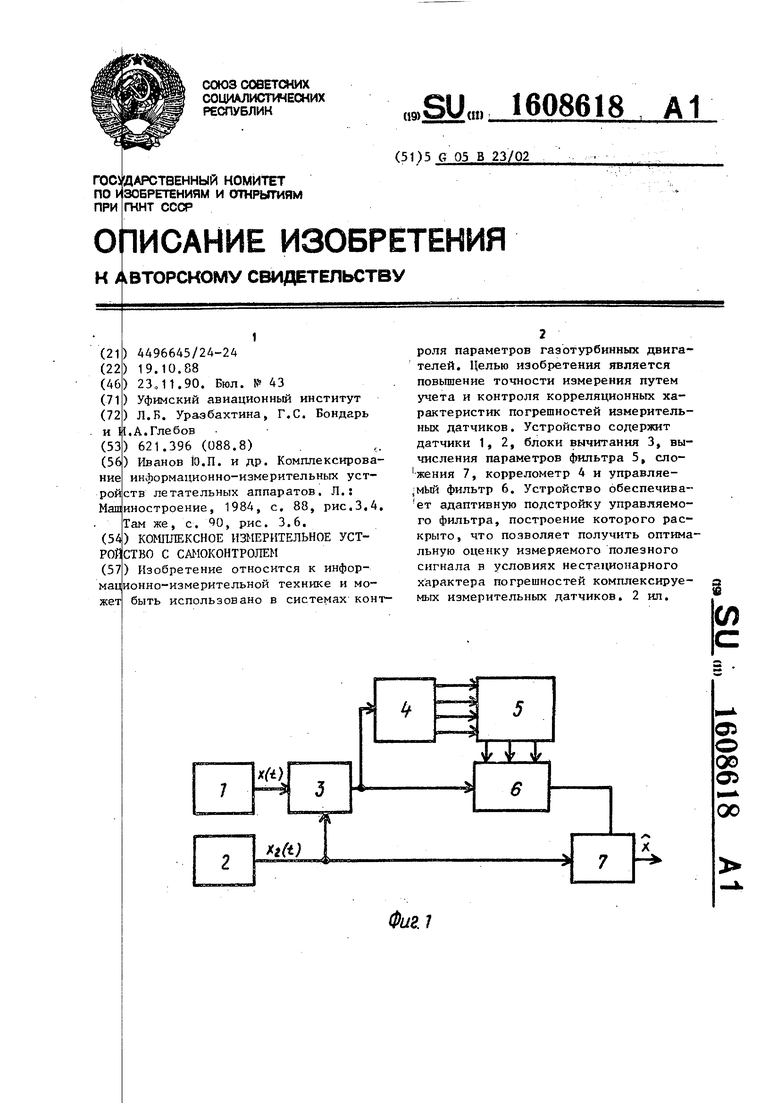
05
О
00
о: 00
Фив.1
Изобретение относится к информационно-измерительной технике, конкретно к устройствам комплексной обработки информации, и может быть исполь- , зовано в системах контроля параметров при исп1лтаниях и эксплуатации газотурбинных двигателей.
Цель изобретения - повьшение точности измерения путем учета и конт- ю роля корреля1щонньгх характеристик погрешностей датчиков.
На фиг. 1 изображена схема устройства на фиг. 2 - схема управляемого ф}тьтра.15
Устройство содержит первый и второй датчики 1 и 2, блок 3 вычитания, коррелометр 4, блок 5 вычисления параметров фильтра, управляемый фильтр 6 и блок 7 сложения.20
Блок 5,-рассчитывающий оптимальные значения параметра управляемого фильтра 6 как функции выходных сиг- налов коррелометра 4 по приведенным математическим выражениям может быть 25 реализован на узлах, деления-, умножения, вычитания и сложения, квадраторах, узлах извлечения квадратного корня, логарифматорах, источниках опорного напряжения.30
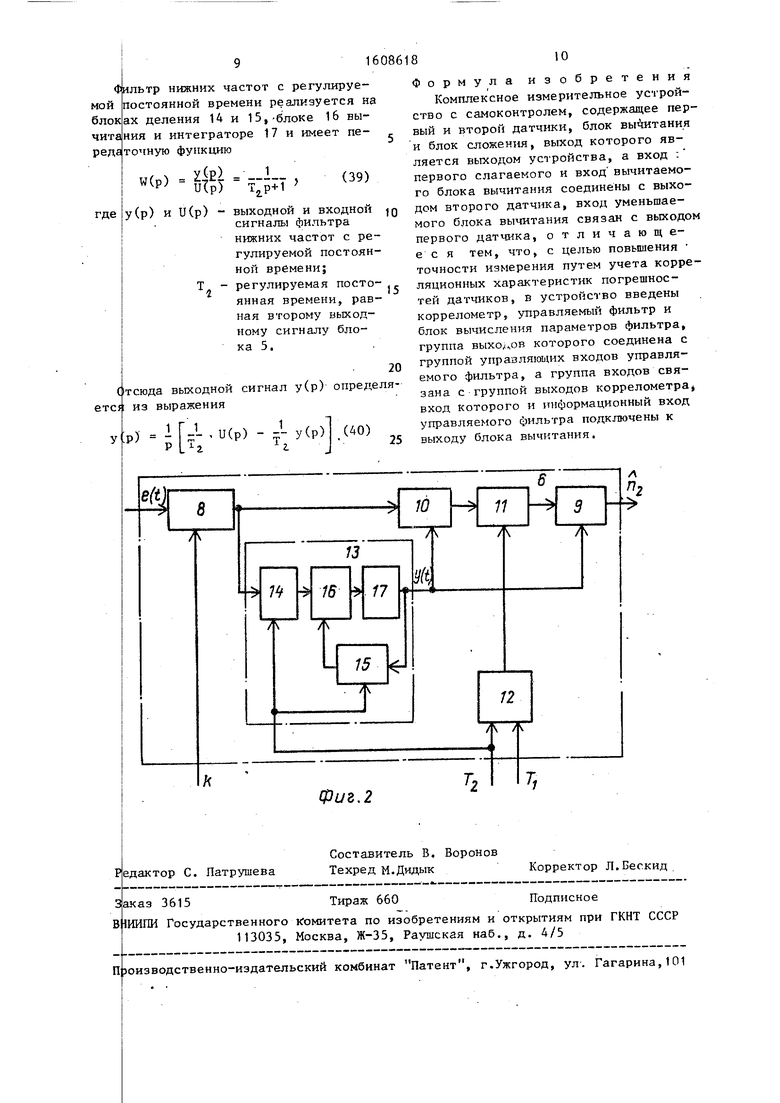
Управляемый фильтр 6 содержит первый блок 8 умножения,, блок 9 сложе- НИН, блок 10. вычитания, второй блок 11 умножения, блок 12 деления, фильтр 13 низких частот с регулиру- 5 емой постоянной времени, состоящий из блоков 14 и 15 де.пения, блока 16 вычитания, интегратора 17.
Устройство работает следующим образом .40
На входа датчиков 1 и 2, безынерционных и измеряющих одну и ту же физическую величину, поступает полезный сигнал x(t)о При условии приведения выходных сигналов датчиков 1 и 2 к дЗ одному уровню они будут равны
x.(t) (-«-n,) x(t) (+n)t.
(1)
50
де x.(t) и ) - выходные сигналы датчиков 1 и 2, соответственно;
n,(t) и ng(t) - аддитивная пог- решность датчи-, ков 1 и 2, соот-| ветственно, при- веденная к выходу этих датчиков .
Описание погрешностей п и п, которые являются нестационарными, априорно отсутствуют. Аппроксимируем корреляционные функции этих погрешностей корреляционными функциями вида
R,«.D,a).e-° - (2) RjC) - .e- , (3)
где (У, (t) и ) параметры затухания, причем возьмем о.бо1ий случай, когда
0, (t) i )..
(4)
D,(t) и - дисперсии погрешностей n,j и n соответственно.
Выходные сигналы датчиков 1 и 2 поступают на-блок 3 вычитания, разностный сигнал на выходе которого равен
l(t) x,(t)-x(t) n,(t)-n2(t) (5)
Корреляционная функция разностного сигнала (с учетом некоррелирован- н ости погрешностей п и п) имеет вид
R,() + RgC)
D,e
D.e
-O. /o/
+ (6)
З
0
т.е.. она равна сумме корреляционных функций погрешностей п , и п.
Разностный сигнал e(t) с вькода блока 3 вычитания поступает на вход коррелометра 4, на четырех выходах которого имеем значения корреляционной функции разностного сигнала Rg(t) для четырех различных значений
: Rg(), Re(), R(E). которые приходят на четыре входа блока 5, на выходах которого формируются сигналы К, Т , и Т, являющиеся параметрами управляемого фильтра 6. Оптимальные значения параметров управляемого фильтра 6 К, Т и Tg, являющихся функциями времени, рассчи- тьшаются в блоке 5,.как функции параметров погрешностей измерения 0(.,
51608618
uSU D,,H D, которые являются апрй-- ак как в вьфажении для корреляционорю неизвестными. Для их оценки .ных функций, аппроксимирующих коррепр длагается определить значения кор-ляционные функции погрешностей п, и
peJяциoннoй функции разностного сиг- ,п, содержатся четыре неизвестных СиГ,,
нала Re() для четырех фиксированныхО г ° г Поэтому имеем систему
- из четырех уравнений с четьфьмя неингервалов корреляции CQ О,С, ,
Cj аС, € ЗС (при с 0,5... 1,5 с) известными
Re(o) .
Re(.) Re() « Re(C.)Re(2C)D,.
Re(,) Re(3«) D,. D..
(7)
1
Репим систему уравнений (7), при этом дл удобства введем следующие обоз- на ения
,(0) а.; RgCC-) а,; (2) aj,, С дяются
Ret3C) аз; -c.fftl
-0/1
L,
Перепишем (7) в следующем виде;
ад D,+ DZ;
а, De+ Le+ D«+ Lpi ;
I(ajaj-a,a) +л| (a aj-aiajli i (ai;aQ aj) (a|.,) д- Г 2(a2 - )
Рассчитаем теперь параметры управляемого фильтра 6, передаточная функ- которого должна быть такой, чтобь
фильтр с минимальными искажениями
Не
пускал п и подавлял п, , сигнал i2DiOii
выходе управляемого фильтра 6 дол- S п , to) пяпняться опенке сигнала - п. . 40
ПС ГЗО1Л jfji JbiiJOi i - - - эс - «
жен равняться оценке сигнала - п .
Оптимальная передаточная функция фильтра 6
. . 21)
ы
WI
J q) (IU)
snt(CO)H(jCi
((-jw)
г;;е S „ (СО) и S (СО) - спектральные плотности слу,, . . 2D(0(i2Dc i
ij;(ja))()(-JO) /ф(л(0)|г Sn,(cj) +.Sn() -гтсо
If 2 .jjo2 i.. (,7)
+ шО ( (oi,-t-jb))((X2-bjcJ)
T FToOlo i + uO
,fi,l + ( ) (18)
X
(7)
aj + %-Ьл ; а, Dg. + D -LVРешениями системы уравнений (Ю) яв(11) (12)
(13)
хшйных погрешностей П/ и Пд соответственно, которые равны
(16)
. . 21)
ы
где Н (jco) - преобразующий оператор, 45 I нашем случае H(ju)) 1;
С 1 операция выбора члена в скобках, соответствующего полюсу в верхней полуплоскости
л|20Д,+ 2D20C2 ;
(19)
IllilS J ™
(c/.+j-toTTofa- p)
. (y+jom
oCBalXz
TIoJ
T5T-j(P)(o()J
(0,-М 1 (
(oii+Io:) (У -jcopj If + j CO p
J Ц. -2-1 2T5 (V
M j-jwpJ.
Pit + .
« pp,T,
в Aft - 1
(20) (21)
W(jCO)
Таким образом, в блоке 5 по посту- 22 s5S;2i liiy li lL±i i ,-- пающим из коррелометра 4 значениям
у+ jCOfS
0(,+JW
Re(0), Re(C), Re(2) и RgO) вычисляются последовательные значения
(Rp(0)Re(3)-R(1)Re(2U) +J(R(0)R(36-Re(m.e(2C))i3(Ri(2)R(0) ...,..-....--.
Rei2O)iReUc)()Re(3C;)
0, - -i- In L,;
R5(U)-L,- Re( . i RjoT L - Re()
-- 5:Re() - Re(0)Li j) - Г
Li - L,
D, Re(0) - Da;
2DzCC2(0.+ )Kt .
К jlT+Fe
J 2D,c, + ;
(i 2D,c;, + 1
1 57
т -
T. - J
(27) (28)
(29)
(30) (31)
функцией (22), выходной сигнал которого, как указывалось выше, содер лт только оценку погрешности измерения -ny(t), которая проходит на вход блока 7 сложения, на другом входе которого сигнал равен х (t). Выходной сигнал блока 7 сложения равен
л . . x(t)
40
Xjt) - n.(t) X(t) 4- n(t) - n (t)3«x(t), (37)
(32) 45
(33) (34) (35)
(36)
50
т.е. оптимальной оценке величины полезного сигнала x(t).
Узлы, составляющие фильтр 6, определяют передаточную функцию
W . iBlM к Е .. (38) р e(t) Т2Р+1
Заметим, что выходной сигнал блока 10 равен вьпсодному сигналу блока В умножения минус выходной сигнал фильт- 55 -ра 13 нижних частот с регулируемой Следовательно, в блоке 5 определя- постоянной времени, а ьыходной сигнал ются параметры К, Т . и Т, управляемо- блока 12 деления равен частному от .го фильтра 6, представляющего собой деления выходного сигнала блока 5 Т,,
на другой выходной сигнал блока 5 Т.
фильтр 1-го порядка с передаточной
. 2D20i2(i+j(p)W.+0(2) 2DiOt2((X1+0/2) .
(pjw(iny +jio(I) (y -()y
1 + 1031/66
Г+ jw(b7
IS1(M K--i-i- ii - (22)
(ju)). 1 + ;
2D2C/a(6 + )
« - -j-fwr
v /
т -
(23) (24) (25)
Таким образом, в блоке 5 по посту- пающим из коррелометра 4 значениям
Re(0), Re(C), Re(2) и RgO) вычисляются последовательные значения
()Re(3C;)
1
(26)
функцией (22), выходной сигнал которого, как указывалось выше, содер лт только оценку погрешности измерения -ny(t), которая проходит на вход блока 7 сложения, на другом входе которого сигнал равен х (t). Выходной сигнал блока 7 сложения равен
л . . x(t)
Xjt) - n.(t) X(t) 4- n(t) - n (t)3«x(t), (37)
т.е. оптимальной оценке величины полезного сигнала x(t).
Узлы, составляющие фильтр 6, определяют передаточную функцию
W . iBlM к Е .. (38) р e(t) Т2Р+1
Заметим, что выходной сигнал блока 10 равен вьпсодному сигналу блока В умножения минус выходной сигнал фильт- ра 13 нижних частот с регулируемой постоянной времени, а ьыходной сигнал блока 12 деления равен частному от деления выходного сигнала блока 5 Т,,
на другой выходной сигнал блока 5 Т.
Фильтр нижних частот с регулируемой постоянной времени реализуется на блоках деления 14 и 15,-блоке 16 вычитания и интеграторе 17 и имеет передаточную функцию
ф --I-- ,(39)
иТр)
W(p)
выходной и входной ,Q сигналы фильтра нижних частот с регулируемой постоянной времени;
регулируемая посто- янная времени, равная второму выходному сигналу бло- ка 5.
. 20
сигнал у(р) определя-
р) ,и(р) (P)J,(0)
Редактор С. Патрушева
Составитель В. Воронов Техред М.Дидык
Заказ 3615
Тираж 660
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. А/5
п оизводственно-издательский комбинат Патент, г.Ужгород, ул. Гагарина,101
Формула изобретен и я Комплек сное измерительное устройство с самоконтролем, содержащее первый и второй датчики, блок вычитания и блок сложения, выход которого является выходом устройства, а вход : первого слагаемого и вход вычитаемого блока вычитания соединены с выходом второго датчика, вход уменьшаемого блока вычитания связан с выходом первого датчика, отличающееся тем, что, с целью повьшшния точности измерения путем учета корреляционных характеристик погрешностей датчиков, в устройство введены коррелометр, управляемый фильтр и блок вычисления параметров фильтра, группа выходов которого соединена с группой управляющих входов управляемого фильтра, а группа входов связана с группой выходов коррелометраj вход которого и информационный вход управляемого фильтра подключены к выходу блока вычитания.
Корректор Л.Бескид
Подписное
