Изобретение относится к области измерительной техники и может быть использовано в информационно-измерительных системах летательных аппаратов и силовых установок.
Известен способ измерения физической величины, основанный на измерении физической величины двумя или более датчиками, фильтрации выходных сигналов каждого датчика и суммирования отфильтрованных сигналов [1]. Недостатком данного способа является наличие погрешности измерения, обусловленной отличием оптимальных параметров фильтров для реальных текущих параметров погрешностей измерений отдельных датчиков от расчетных, полученных по априорныи данным о параметрах погрешностей измерения.
Известен также способ измерения физической величины [2], заключающийся в том, что последовательно измеряют физическую величину двумя или более датчиками, число которых равно N, вычисляют корреляционные функции выходных сигналов датчиков, по ним вычисляют оптимальные параметры фильтров,с помощью которых фильтруют выходные сигналы датчиков, затем суммируют отфильтрованные сигналы и получают значение измеренной физической величины, причем после измерения выходные сигналы датчиков преобразуют в существенно стационарные, а корреляционные функции разделяют на слагаемые, первое из которых равно корреляционной функции полезного сигнала, второе - корреляционной функции погрешности измерения.
Недостатком способа является наличие погрешности измерений, обусловленной отклонением параметров фильтров от оптимальных, поскольку разделение корреляционных функций выходных сигналов датчиков на корреляционные функции полезного сигнала и погрешности измерений проводится без использования какого-либо объективного критерия, а также введением преобразования сигналов в существенно стационарные, что не позволяет учесть нестационарный характер погрешностей измерения при настройке фильтров.
Задача, на решение которой направлено заявляемое изобретение, - повышение точности измерения физической величины за счет повышения качества фильтрации.
Поставленная задача решается тем, что в известном способе измерения физической величины, заключающемся в том, что последовательно измеряют физическую величину двумя или более датчиками, число которых равно N,вычисляют корреляционные функции выходных сигналов датчиков, по ним вычисляют оптимальные параметры фильтров, с помощью которых фильтруют выходные сигналы датчиков, затем суммируют отфильтрованные сигналы и получают значение измеренной физической величины, дополнительно вычисляют N разностей выходных сигналов датчиков, образующих попарно неповторяющиеся совокупности, вычисляют корреляционные функции N разностей выходных сигналов датчиков, вычисляют корреляционные функции N разностных сигналов для q фиксированных, последовательно увеличивающихся интервалов корреляции, вычисляют значения корреляционных функций погрешностей измерения каждого датчика путем решения q линейных уравнений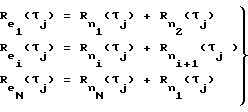
где  - корреляционная функция разностного сигнала, полученного вычитанием выходного сигнала (i+1)-го датчика из выходного сигнала i-го датчика, определенная для интервала корреляции τj , где j = 1 ...q;
- корреляционная функция разностного сигнала, полученного вычитанием выходного сигнала (i+1)-го датчика из выходного сигнала i-го датчика, определенная для интервала корреляции τj , где j = 1 ...q; - корреляционная функция погрешности i-го датчика ni, где i = 1 ...N.
- корреляционная функция погрешности i-го датчика ni, где i = 1 ...N.
Затем вычисляют q неизвестных параметров корреляционных функций погрешностей измерения каждого датчика путем решения системы q нелинейных уравнений вида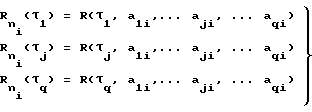
относительно неизвестных aji для вычисления оптимальных параметров фильтров.
Достигаемый технический результат обосновывается следующим образом.
Физическая величина измеряется N датчиками и выходные сигналы датчиков xi(t), приведенные к одному уровню, равны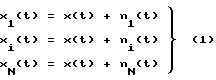
где x(t) - сигнал, отражающий значение измеряемой физической величины;
ni(t) - аддитивная погрешность измерения i-го датчика, где i = 1 ...N.
Фильтрация сигналов датчиков должна выполняться при условии, что сумма передаточных функций фильтров будет постоянной величиной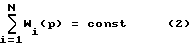
где W i(p) - передаточная функция фильтра выходного сигнала i-го датчика.
Выполнение этого динамического условия приводит к отсутствию динамической погрешности преобразования полезного сигнала.
Такая измерительная система будет эффективной, если среднеквадратичная погрешность измерений системы будет в несколько раз меньше среднеквадратической погрешности измерений самого точного из комплексируемых датчиков.
Синтез оптимальных параметров фильтров проводится из условия, чтобы
где  - спектральная плотность погрешности измерений i-го датчика;
- спектральная плотность погрешности измерений i-го датчика; - модуль амплитудно-частотной характеристики фильтра.
- модуль амплитудно-частотной характеристики фильтра.
Очевидно, что параметры фильтров не зависят от параметров полезного сигнала, а полностью определяются параметрами спектральных плотностей погрешностей измерений или соответствующими корреляционными функциями, однозначно связанными со спектральными плотностями обратным преобразованиям Фурье
Вид корреляционных погрешностей измерения известен априорно с точностью до параметров и в общем случае носит нелинейный характер
где τ - интервал корреляции;
aij - параметр корреляционной функции i-го датчика.
Если вид функции априорно неизвестен, то возможно аппроксимация неизвестной функции полиномом вида
соответствующая случайному процессу типа "нерегулярная качка".
Тогда при a5i = 0, a3i = 0
при a5i = 0
при a5i = 0, a4i = 0
и так далее.
В зависимости от возможностей вычислительных устройств можно использовать неявный способ задания вида корреляционной функции в виде степенного или функционального ряда.
Разностные сигналы ei(t), полученные вычитанием выходного сигнала (i+1)-го датчика от выходного сигнала i-го датчика,не содержат составляющих полезного сигнала и являются наблюдаемыми сигналами, определяемыми текущими значениями погрешностей измерения:
Сравниваемые выходные сигналы датчиков образуют попарно неповторяющиеся совокупности, а число вычисляемых разностей равно числу используемых датчиков. Корреляционная функция разностного сигнала ei(t) равна сумме корреляционных функций погрешностей i-го и (i+1)-го датчика, при условии их некоррелированности для любого фиксированного интервала корреляции τj .

Вычисление корреляционных функций всех разностей позволит определить однозначно значения корреляционных функций погрешности каждого датчика для фиксированного интервала времени τj решением системы линейных однородных уравнений.
В результате корреляционная функция погрешности каждого датчика определена в одной точке.
Если число неизвестных параметров aijкорреляционной функции равно q, то для их определения необходимо q значений корреляционной функции для q фиксированных, последовательно увеличивающихся интервалов корреляции τj , где j = 1 ...q.
Если погрешности измерений содержат систематические составляющие, то значения корреляционных функций разностных сигналов равны
Величина интервала корреляции τq должна быть при этом наибольшей. Эта система может быть решена относительно  , если математическое ожидание погрешности хотя бы одного из датчиков известно.
, если математическое ожидание погрешности хотя бы одного из датчиков известно.
Таким образом, при использовании предлагаемого способа не требуется разделения корреляционных функций выходных сигналов датчиков на корреляционные функции полезного сигнала и помехи, не требуется преобразования сигналов в существенно стационарные, что снижает погрешность измерения, обуславливающую отклонения параметров фильтров от оптимальных. Также способ позволяет учесть нестационарный характер погрешностей измерения при настройке фильтров, так как оптимальные значения параметров управляемого фильтра являются функциями времени и рассчитываются как функции параметров погрешностей измерения, которые являются априорно неизвестными, а рассматриваемый способ реализует возможность вычисления параметров погрешностей измерения путем определения значений корреляционных функций разностных сигналов. Это позволяет однозначно определить значения корреляционных функций погрешности каждого датчика для фиксированного интервала времени τj и затем определить априорно неизвестные параметры корреляционных функций погрешностей и более точно вычислить оптимальные параметры фильтра.
Пример конкретной реализации способа.
Рассмотрим двухкомпонентную комплексную систему для оценки температурного состояния газотурбинного двигателя, состоящую из термопары и оптического пирометрического преобразователя.
Корреляционные функции погрешностей преобразователей имеют следующий вид:
пиромерта 
термопары 
Значения A2, B2 и ω являются априорно неизвестными. Для их оценки определим значение корреляционной функции разностного сигнала Re(τ) для трех фиксированных интервалов корреляции τo= 0, τ1= τ, τ2= 2τ.
Решим систему уравнений (11), при этом для удобства введем следующие обозначения Re(τo)= N1;Re(τ)=N2;Re(2τ)= N3.
Перепишем (11) в следующем виде:
Решением системы уравнений (12) являются:
Зная корреляционные функции погрешности датчиков и определив параметры погрешностей измерения A2, B2 и ω, возможно провести синтез оптимальных параметров фильтра, исходя из условия (3) и используя преобразование (4).
Использование: в информационно-измерительных системах летательных аппаратов и силовых установок. Сущность изобретения: способ измерения физической величины заключается в том, что осуществляют преобразование ее в выходные сигналы N датчиков, вычисляют оптимальные параметры N фильтров и настраивают их, фильтруют выходные сигналы датчиков и получают значение измеренной физической величины суммированием отфильтрованных сигналов. Особенность способа состоит в том, что вычисляют N разностей выходных сигналов датчиков, вычисляют корреляционные функции разностных сигналов для q априорно заданных интервалов корреляции, по ним определяют q параметров априорно известных корреляционных функций погрешностей преобразования физической величины каждым датчиком, которые используют для вычисления оптимальных параметров фильтров. Благодаря этому повышается точность измерения физической величины.
Способ измерения физической величины, заключающийся в том, что осуществляют преобразование измеряемой физической величины в выходные сигналы N датчиков (N ≥ 2), вычисляют оптимальные параметры N фильтров и настраивают их, фильтруют выходные сигналы датчиков соответствующими фильтрами и получают значение измеренной физической величины суммированием отфильтрованных сигналов, отличающийся тем, что вычисляют N разностей выходных сигналов датчиков, образующих попарно неповторяющиеся совокупности, причем каждый выходной сигнал используют при вычислении упомянутых разностей не менее двух раз, одновременно вычисляют корреляционные функции разностных сигналов для q априорно заданных интервалов корреляции, по ним определяют q параметров априорно известных корреляционных функций погрешностей преобразования физической величины каждым датчиком, которые используют для вычисления оптимальных параметров фильтров.
| Челпанов И.Б | |||
| Оптимальная обработка сигналов в навигационных системах | |||
| - М., 1967, с | |||
| Способ получения и применения продуктов конденсации фенола или его гомологов с альдегидами | 1920 |
|
SU362A1 |
