Изобретение относится к области регу- ирования механических колебанитЯ резонансных обьектов и может быть ис- гользовано в устройствах вибрационной
1ХНИКИ.
Цель изобретения - повышение степе- ни стабилизации частоты и точности настройки в резонанс,
На фиг.1 и 2 поясняется сущность физического критерия на примере сейсмоистОч- ь ика с электродинамическим возбудителем; а фиг.З - кривые некоторых параметров; на фиг.4 - кривые для коэффициента, по кото- f ому определяется резонанс на данной ча- стоте; на фиг.5 - блок-схема устройства, I еализующего предлагаемый способ; на (||иг.6 - эпюры перемещения и скорости
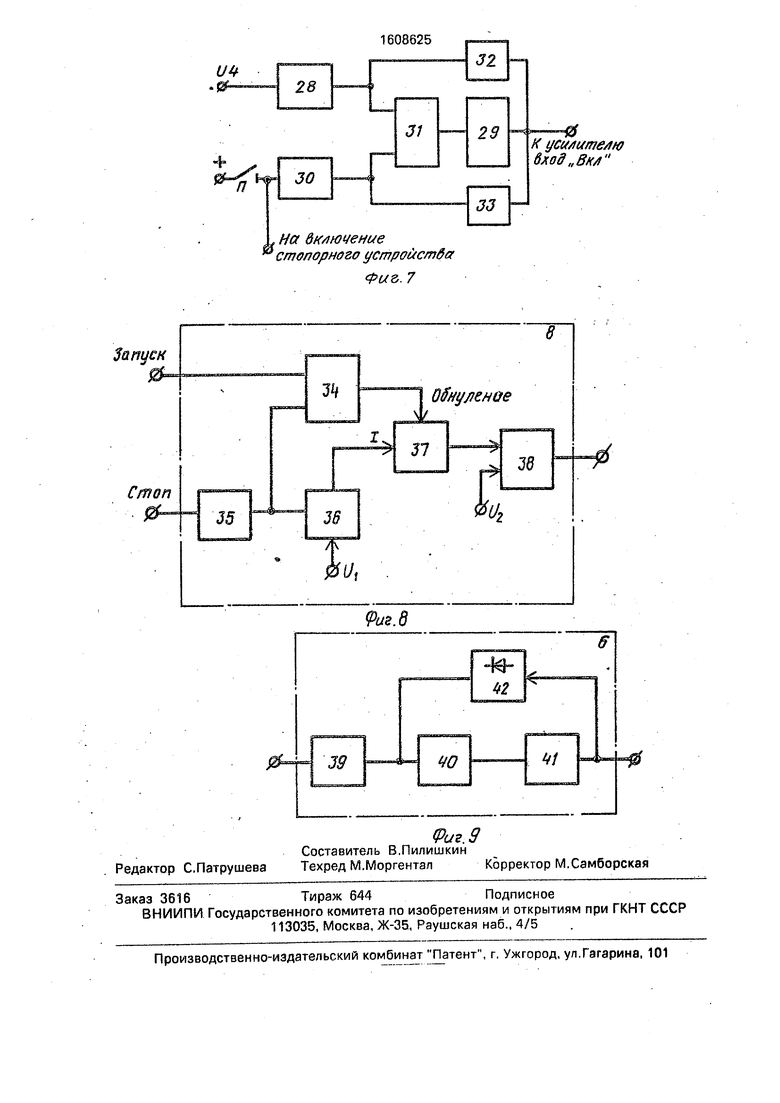
платформы механического объекта, а также токов и напряжений в устройстве, реализующем предлагаемый способ; на фиг.7 - электрическая схема блока на фиг.8 - схема измерителя частоты; на фиг.9 - схема блока линейного изменения напряжения.
Предлагаемый способ заключается в следующем.
В режиме свободных колебаний измеряют собственную частоту механического объекта.
Переключают механический объект в режим вынужденных колебаний с частотой, равной частоте измеренных собственных колебаний. В процессе работы за счет внешних факторов происходит изменение собстOs
о
00
о
hO СЛ
венной частоты объекта и нарушение условия резонанса. Поэтому для поддержания резонанса требуется постоянная подстройка собственной частоты на частоту вынужденных колебаний.
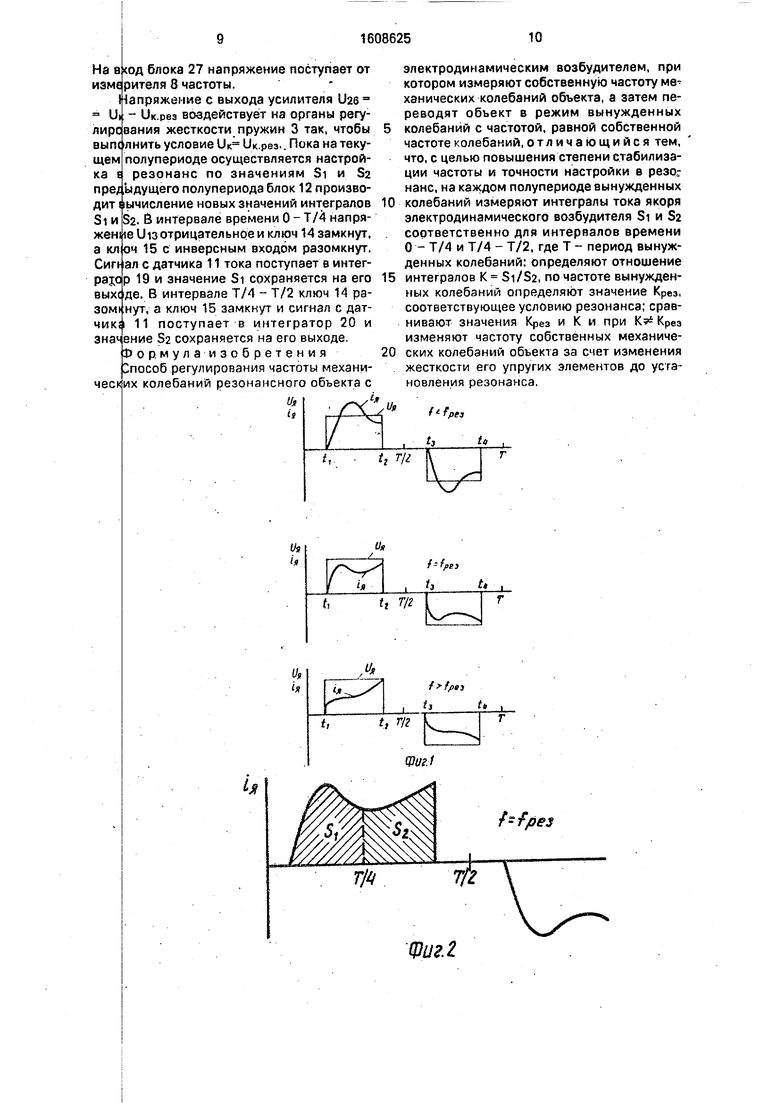
На каждом полупериоде вынужденных колебаний измеряют интегралы тока якоря электродинамического возбудителя Si и S2, соответственно для интервалов времени 0- Т/4 и Т/4 - Т/2, где Т - период вынужденных колебаний.
Определяют отношение интегралов.
По частоте вынужденных колебаний определяют значение Крез f (сфез), соответствующее условию резонанса.
Сравнивают .значения Крез и К и по результату сравнения формируют сигнал, изменяющий собственную частоту механического объекта до достижения равенства
К Крез.
В основу способа положен физический критерий. Сущность критерия поясняется на примере вибратора с электродинамическим возбудителем, на якорь которого подаются прямоугольные знакопеременные импульсы напряжения ия(фиг.1). В рабочем режиме платформа сейсмоисточНика и якорь возбудителя совершают синусоидальные колебания, при этом в якоре индуцируется ЭДС, определяющая ток якоря я (t).
Математическая модель вибратора имеет вид
где 1я - ток якоря;
ш 2 тг fsbiH - угловая скорость;
у -угол поворота;
Lfl, Ря - индуктивность и активное сопротивление якоря;
Кд - постоянная двигателя;
Уя - напряжение на якоре;
b - коэффициент диссипации;
с - жесткость упругих элементов (пружин);
i - момент инерции.
Уравнения записаны для двигателя с вращающимся ротором, который через рычажный механизм создает колебания платформы с линейной скоростью v(t) и пе- ремещением x(t}. Между й и v, 9 и х устанавливается соответствие через длину плеча рычажного механизма.
Суть критерия в том, что для определения условия резонанса вводится отношение двух интегралов, определенных на первой и
0
5
0
второй четвертях каждого полуаериода колебаний .
тА / i«dt
о Si,ПЛ
ТУТ:
J isdt
т/4
т.е. критерий представляет собой отношение площадей Si и S2, полученных на полупериоде (фиг.2).
На фиг.З даны кривые К Si/S2 и т/2 q J |2(j в зависимости от собственной ча0
стоты механического объекта.
Значение q, пропорциональное тепловым потерям в якоре, при резонансе является минимальным. А по самой кривой К() однозначно определяется режим работы вибрационного механического объекта, а именно К Крез-дорезонансный; К Крез - резонанс; К Крез - зарезонанс- ный.
При изменении частоты вынужденных 5 : колебаний изменяется значение Крез и зависимость Крез приведена на фиг.4.
Существуют условия,при которь1х информационные свойства критерия ограничиваются. Это происходит в том случае, когда прямая К Крез и кривая К(й)соб) пересекаются более, чем -в одной точке, что зависит от параметров колебательной системы.
При fco6 fsbiH эти линии не пересекаются и поэтому в зарезонансном режиме информационные свойства критерия сохраняются в неограниченном диапазоне частот.
В дорезонансном режиме fco6 вын эти линии могут пересекаться при некоторой частоте fниж и тргда информационные свой- ства критерия сохраняются от частоты fnHx и выше. Значение нижней граничной частоты fниж зависит от добротности механического контура атех Т W/ b и параметров двигателя 1я и Кя. Уменьшение Тниж можно осуществить уменьшением 1я или увеличением Ня.
Как следует из результатов исследований,при изменении частоты вынужденных колебаний Гвын изменяется значение коэффициента Крез, по которому определяется резонанс на дан ной частоте (фиг.4). Поэтому в устройстве, реализующем данный критерий, должен присутствовать блок, воеп роизводящий нелинейною зависимость Kpe3(fBbiH). Перед настройкой нелинейного блока следует провести следующие расчетные операции.
0
5
0
5
50
55
Для конкретного вибратора с йзвестны- параметрами Ь,Т , La, Re по уравнениям производится расчет режимов резонан- для трех значений вынужденных частот н 1, febiH 2, f вын 3, обеспечивая резонанс оцбором коэффициентов жесткости пру- жцн С1,02, сз. Для каждого значения частоты
(2) определяются Крез 1, Крез 2, Крез 3,
пойле чего, используя интерполяционный мюгочлен Лагранжа, составляется анали- lecKoe выражение кривой в виде Крез (feHh) - Р fsbiH + 9 вын + h,
Крез1 ,
(feuHl fBbiH2 ) ( fsbiHl fBHH3 )
MV 0)
са
faM п
ти
где Р
Крез2
+
( fBbiH2 вын1
-fI ( вын2 -fsuHS ) езЗ
+
( febiHS fBbiH2 )
( вынЗ febiHl Pl + Р2 + Рз .
Нелинейный блок настраивается по вычис- ле жым значениям р, д, h.
В процессе регулирования по описан- но|му критерию изменение коэффициента диссипации b вызовет отклонение fUt. 1б от сорез - позтому данное устройство Д01ЖНО работать при постоянных значениях Ь, либо с известным законом изменения этого коэффициента. Во втором случае этот закон должен учитываться при расчете кри- ВОр Крез (fBbin).
Устройство для настройки в резонанс механических объектов содержит плдтфор- му 1 с электродинамическим возбудителем 2, установленную на пружинах 3 с регулируем й жесткостью. Платформа связана с датчиком 4 скорости движения платформы
Устройство также содержит компаратор 5| ()лок 6 линейного изменения напряжения, од ювибратор 7, измеритель 8 частоты, гене )атор 9, усилитель 10, датчик 11 тока. блок 12 анализа, удвоитель 13 частоты, ключи 14 и 15, компаратор 16, одновибраторы 17 и 18, интеграторы 19 и 20, ключи 21 и 22, блоки 23 и 24 памяти, делитель 25, усилитель 26, блок 27 нелинейности.
Блок Пуск (фиг.7) содержит инверторы 28 и 29; цепь 30 задержки; логический эле- мент И-НЕ 31; диоды 32 и 33. Этот блок вы юлняет следующие функции - снимает платформу со стопорного устройства и за- де()живает включение усилителя 10 мощности на полпериода колебаний.
При нажатии кнопки П включается CTdnopHoe устройство и платформа освобождается от стопора. Так как в первый МО «leHT она неподвижна, то напряжение на выходе датчика 4 скорости U4 О и на выходе инвертора 28 существует логическая 1. На выходе цепи 30 задержки за счет вре,-.
10
15
20
25
30
35
40
45
менной задержки действует О, позтому на выходе элемента 31 - сигнал 1, а на выходе инвертора 29 - О. Снятая со стопора платформа начинает движение, и.на датчике скорости 4 появляется напряжение U4 О, что приводит к появлению на выходе инвертора 28 сигнала О, который, однако, не изменяет состояние выходов элемента 31 - 1 и инвертора 29 - О. Через полпериода колебания платформа окажется в нижнем крайнем положении и снова U4 О, а на выходе инвертора 28 появится 1. К этому времени на выходе цепи задержки 30 также появится 1, так как постоянная времени для цепи 30 задержки устанавливается так, чтобы через полпериода колебаний на выходе цепи задержки 30 появилась логическая 1. Таким обрезом через полпериода колебаний после пуска на обоих входах элемента 31 появляется 1, и на выходе инвертора 29 также 1, которая через прямо включенные диоды 32 и 33 прикладывается к обоим входам элемента 31, запрещая в дальнейшем изменение состояния элемента 31, а значит и инвертора 29. Выходной сигнал инвертора 29, имеющий значение 1, включит усилитель 10.
Измеритель 8 частоты, изображенный на фиг.8, содержит двухвходовый логический элемент И 34, инвертор 35, аналоговый ключ 36, интегратор 37, делитель 38 аналоговых сигналов. Этот блок осуществляет измерение собственной частоты колебаний механического обьекта, хранение и выдачу информации об этой частоте. Измерение частоты осуществляется на основе интегриро- вания функции. При этом на выходе
t интегратора напряжение U / Uidt Ui t,
о
а если интегрирование ведется на интервале времени (О - Т/2), то U UiT/2 Ui/2f, где f - измеряемая частота. После операции деления постоянного напряжения U2 на U на выходе 8 напр:яжение 2U2
UBUi
f а -f
50
55
Описанный алгоритм в блоке 8 осуществляется следующим образом. Во время измерения частоты на входе Стоп действует логический О, и на выходе инвертора 35 существует 1,замыкающая ключ 36. В результате на первый вход интегратора 37 подается постоянное напряжение Ui. Начало измерения определяется моментом появления короткого импульса 1 на входе Запуск, отчего на обоих входах элемента 34 появляются 1 и с выхода элемента 34 короткий импульс 1 производит обнуление интегратора 37. Измерение завершается в
момент появления на входе Стоп сигнала Г- а этом случае на выходе инвертора do поязпяется О, который размыкает.ключ 36, но не изменяет состояние выхода элемента 34, так как там на входе Запуск действует О. 8 результате на выходе интегратора 37 сохраняется постоянное напряжение U8 Uit. Для измерения частоты интервал времени импульсом 1 на входе Запуск и 1 на входе Стоп должен равняться Т/2 Для получения высокой точности хранения напряжения 7 в качестве операционных усилителей в блоке 8 могут быть применены электрометрические усилители с входными токами 10 ... Ю А Ю.
ДПШМвП . .... -ь
Блок 6 (фиг.9) содержит одиовибратор 39 возбуждаюи ийся задним фронтом входного сигнала., инверторы .40 и 41 и диод 42. Этот блок реагирует только на первый прямоугольный импульс напряжения, поступивший на вход, задним фронтом которого изменяется состояние выход.а блока 6 с О на 1 и фиксируется после этого. О работает спедующ м образом. Пока на вход блока не поступил прямоугольный импульс напряжения.,на выходе одновибрзтора J9 действует О, а на выходах инверторов 40 и 41 соответственно 1 и О. При появлении прямоугольного 1дапульса на вхо,де блока 6 его состояние не изменится, пока не пройдет задний фронт этого импульса, которым возбудит одиовибратор 39 и на .его выходе появится 1. Эта 1 изменит состояние выходов инвертора 40 на О, инвертора 41 - на 1, С выхода 41 сигнал 1 через- прямо включенный диод 42 поступит на вход инвертора 40 и тем самым зафиксирует состояние выхода блока 6,
Устройство работает следующим о&разом.
Перед пуском платформа 1 удерживается в одном из крайних положений, например в верхнем. При поступлении команды Пуск стопорное устройство отпускает платформу 1 и она начинает свое движение вниз, при этом на первом полупериоде колебаний двигатель не включается и плат- ,форма 1 совершает свободное колебание
время свободного колебания в устройстве измеряется собственная частота механического объекта, При движении платформы 1 на выходе датчика 4 скорости появляется напряжение U4, включающее
компаратор 5. По переднему фронту сигнала U5 компаратора 5 срабатывает одно- вибратор 7 и импульсом U7 включает измеритель 8 частоты. Через полпериода
когда платформа 1 окажется в крайнем ииж- нек положении (принято t 0), напряжение
5 10
1
на выходе датчика 4 скорости равно нулю и- компаратор 5 закроется; при этом задний фронт выходного напряжения компаратора. 5 запустит блок 6, который напряжением U6 остановит измерение в блоке 8, переводя его в режим хранения информации. Напряжение выхода блока 8 будет постоянно су- ществооать на входе генератора 9, определяя его частоту, равную частоте соб- ственных колебаний механического объекта в момент ее измерения.
В момент времени t О механически / объект переводится в режим вынужденных колебаний подачей через блок Пуск сигиа- ли на включение усилителя 10 мощности и на электродинамический вибровозбудитёль 2, через датчик 11 тока, подается напряжение Uio. При подаче напряжения в якоре еозбудителя 2 протекает ток, определяемый уравнением движения механического объекта и величиной питающего напряжения Uio. Частота напряжения Uio задается генератором 9. Для получения на каждом полупериоде колебаний интегралов 5 т/4т/2
Si / «dt, Sa J, l«fit напряжение с гене0т/4
рагора 9 поступает на удвоителъ 13 частоты, предназначенный для выделения моментов 0 времени с дискретностью Т/4.
Рассмотрим работу €лока 12 на полупериоде вынужденных колебаний. Напряжение Ui3 с удвоителя 13 частоты поступает на компаратор 16, формирующий прямоуголь- ц ные импульсы Ui6. По переднему фронту импульса и 16 срабатывает одновибратор 17 и импульсом Ui7 замыкаются ключи 21 и и блоки 23 и 24 памяти переводятся в режим Запись. При эгом с выходов интеграторов дп 19 и 20 значения Si и S2, полученные на предыдущем полупериоде, записываются в блоках памяти 23 и 24 соответственно, После исчезновения импульса Ui ключи 21 и 22 разомкнутся, а блоки 23 и 24. па.мяти 45 перейдут в режим хранения. По заднему фронту Ui7 срабатывает одновибратор 18 и импульсом- Ui8 обнуляет интеграторы 19 и 20 Таким образом в начале текущего полупериода колебаний выбирается информа- гп ция Si и S2 за предыдущий полупериод и подготавливаются каналы к получению этой информации на текущем полупериоде. L. блоков памяти 23 и 24, находящихся в режиме Считывание, напряжения, пропорцио- нальные Si и S2./ OCтyпaют в делитель 25, с выхода которого напряжение UK bi/aa поступает на прямой вход дифференциального усилителя 26, на инвертирующий вход которого поступает напряжение Укрез - Крез (Гвыи) С блока 27 нелинейности.
На ekoA блока 27 напряжение поступает от измс рителя 8 частоты.
Напряжение с выхода усилителя Uae Ui - Ок.реэ воадействуёт на органы регу- лирсаания жесткости пружин 3 так, чтобы выпс лнить условие Шк-рез.. Пока на текущем полупериоде осуществляется настройка Е резонанс по значениям Si и Sz пре/ ыдущего полупериода блок 12 производит пычисление новых значений интегралов Si и S2. В интервале времени О - Т/4 напряжение Ui3 отрицательное и ключ 14 замкнут, а клоч 15 с инверсным входом разомкнут, Cиг ал с датчика 11 тока поступает в интег- pajop 19 и значение Si сохраняется на его выхс де. В интервале Т/4 - Т/2 ключ 14 разом) нут, а ключ 15 замкнут и сигнал с дат- чикс 11 поступает в интегратор 20 и значение S2 сохраняется на его выходе. Рормулаизобретения ;;пособ регулирования частоты механических колебаний резонансного объекта с
электродинамическим возбудителем, при котором измеряют собственную частоту ме ханических колебаний объекта, а затем переводят обьект в режим вынужденных
колебаний с частотой, равной собственной частоте колебаний, отличающийся тем, что, с целью повышения степени стабилизации частоты и точности настройки в резонанс, на каждом полупериоде вынужденных
колебаний измеряют интегралы тока якоря электродинамического возбудителя Si и $2 соответственно для интервалов времени О - Т/4 и Т/4 - Т/2, где Т - период вынужденных колебаний: определяют отношение
интегралов К Si /S2, по частоте вынужденных колебаний определяют значение Крез, соответствующее условию резонанса; сравнивают значения Крез и К и при К Крез изменяют частоту собственных механических колебаний объекта за счет изменения жесткости его упругих элементов до установления резонанса.

| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЗОНАНСНЫЙ ИНВЕРТОР НАПРЯЖЕНИЯ | 1993 |
|
RU2072619C1 |
| РЕЗОНАНСНЫЙ ИНВЕРТОР ТОКА | 1993 |
|
RU2072618C1 |
| Способ виброобработки конструкции для снижения остаточных напряжений и устройство для его осуществления | 1987 |
|
SU1421784A1 |
| Устройство для вибрационного контроля изделий | 1982 |
|
SU1073593A1 |
| Устройство для регулирования колебаний виброплощадки | 1981 |
|
SU987597A1 |
| КОРИОЛИСОВЫЙ МАССОВЫЙ РАСХОДОМЕР | 2018 |
|
RU2746307C1 |
| Способ обезвешивания и возбуждения колебаний при модальных испытаниях и устройство для его осуществления | 2017 |
|
RU2677942C2 |
| СПОСОБ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ КОНСТРУКЦИЙ И СИСТЕМ НА МЕХАНИЧЕСКИЕ И ЭЛЕКТРОННЫЕ ВОЗДЕЙСТВИЯ | 2014 |
|
RU2569636C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМИ ВИБРАТОРАМИ | 2008 |
|
RU2348961C1 |
| Способ определения парциальных частот управляемой поверхности летательного аппарата и устройство для его осуществления | 2019 |
|
RU2715369C1 |


Изобретение может быть использовано в вибрационной технике, работающей в режиме резонанса. Цель изобретения - повышение степени стабилизации частоты и точности настройки в резонанс. В основу способа положен физический критерий. За счет введения критерия, определяющего условия резонанса и равного отношению интегралов тока якоря электродинамического вибровозбудителя соответственно на первой и второй четвертях каждого полупериода колебаний механического объекта, обеспечивается повышение точности и стабильности частоты возбуждаемых колебаний. Измеряется собственная частота механического объекта, и на эту частоту настраивается генератор, задающий в дальнейшем режим вынужденных колебаний. Изменение собственной частоты под действием внешних факторов вызывает нарушение условия резонанса. Это регистрируется с помощью указанного критерия, и вырабатывается сигнал, воздействующий на параметры механического объекта таким образом, что восстанавливается резонансный режим. 9 ил.
Щиг.2
ФигЛ
щезониисньш режим
ФиаЪ
сод
Фиг: 5
Пуск
5 (/7
i/
S
. ffojeS.
.t t
i
fPu2.6
.. Нее д{ /1Н}чение стопорного устройства
Ф1/&.7
Запуск
1608625
А ycu/iume w 6j(od,,Sff/f
9as.8
