4- 18 0 3

| название | год | авторы | номер документа |
|---|---|---|---|
| СТАНОК ДЛЯ ДОЕНИЯ КОРОВ | 2000 |
|
RU2185053C2 |
| Устройство для управления конвейерной доильной установкой | 1973 |
|
SU546327A1 |
| Устройство для дозирования кормов | 1976 |
|
SU818569A1 |
| ЖИВОТНОВОДЧЕСКИЙ КОМПЛЕКС ПО ПРОИЗВОДСТВУ МОЛОКА | 1999 |
|
RU2210886C2 |
| Доильная установка | 1975 |
|
SU649373A1 |
| СПОСОБ МАШИННОГО ДОЕНИЯ И ДОИЛЬНЫЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2737207C2 |
| ДОИЛЬНЫЙ АППАРАТ | 2017 |
|
RU2646622C1 |
| Коровник | 1988 |
|
SU1658936A1 |
| Устройство для контроля доения коров в индивидуальных станках | 1980 |
|
SU933054A1 |
| МОЛОЧНО-ДОИЛЬНЫЙ КОМПЛЕКС | 2004 |
|
RU2267261C2 |
Изобретение относится к промышленному животноводству, в частности к устройствам для доения коров. Цель изобретения - повышение производительности труда оператора. При поступлении сигнала о наличии свободного станка блок 36 управления подает сигнал на электропневмопереключатель 40 и через клапан 39 включает исполнительный механизм 38 на открытие входных створок 18 секции площадки. Проходя створку 18, корова воздействует на путевой выключатель 37, подает сигнал на блок 36. При равенстве числа свободных станков и коров, прошедших створки 18, последние закрываются. 6 ил.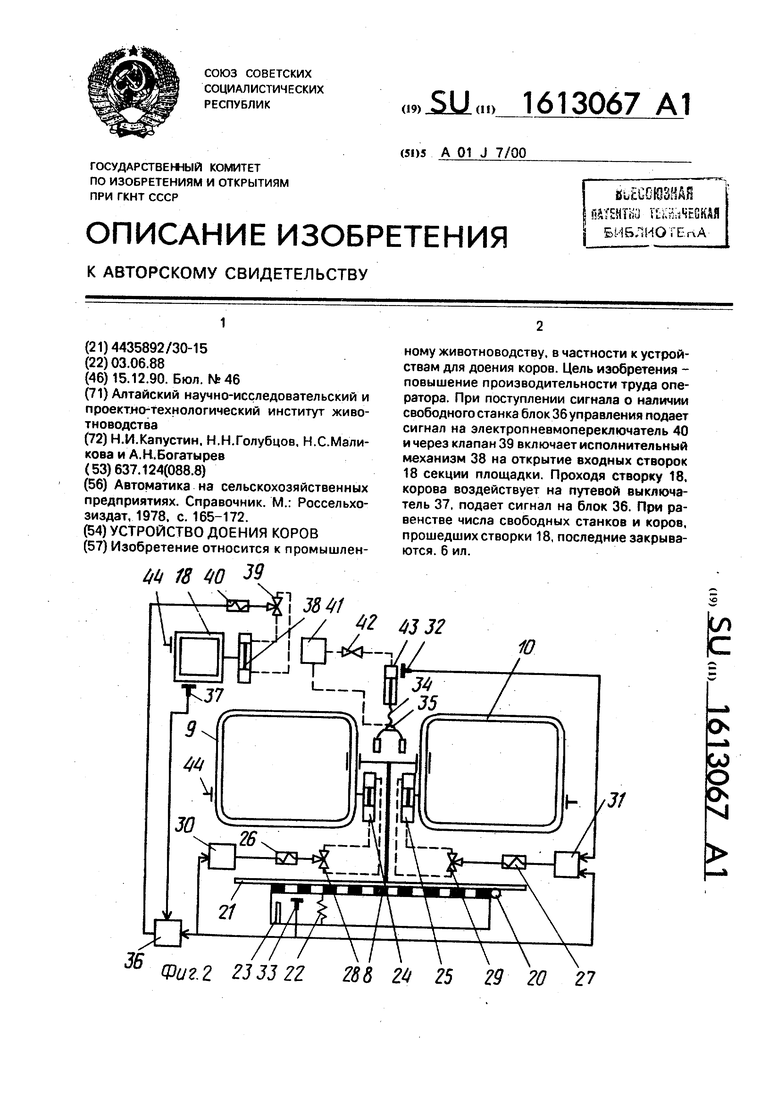
36
Фи.2 233322
10
СО
о
ON VI
Изобретение относится к промышленному животноводству, в частности к устройствам для доения коров.
Цель изобретения - поаышен11е производительности труда оператора,
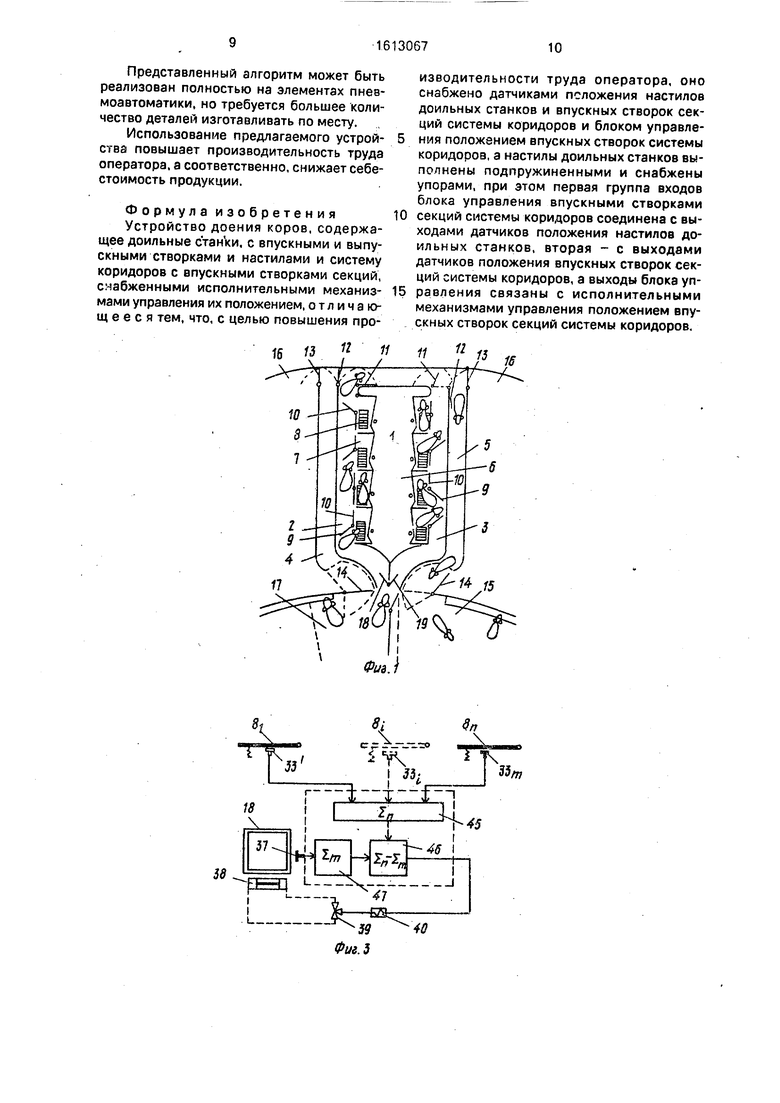
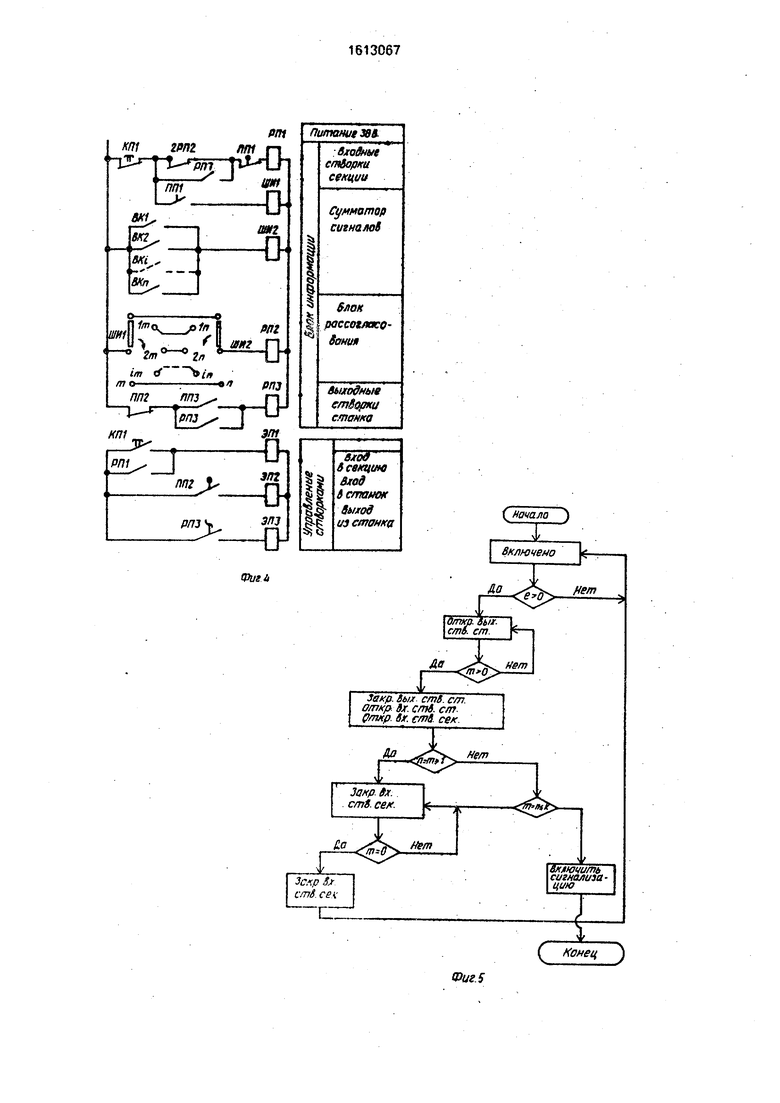
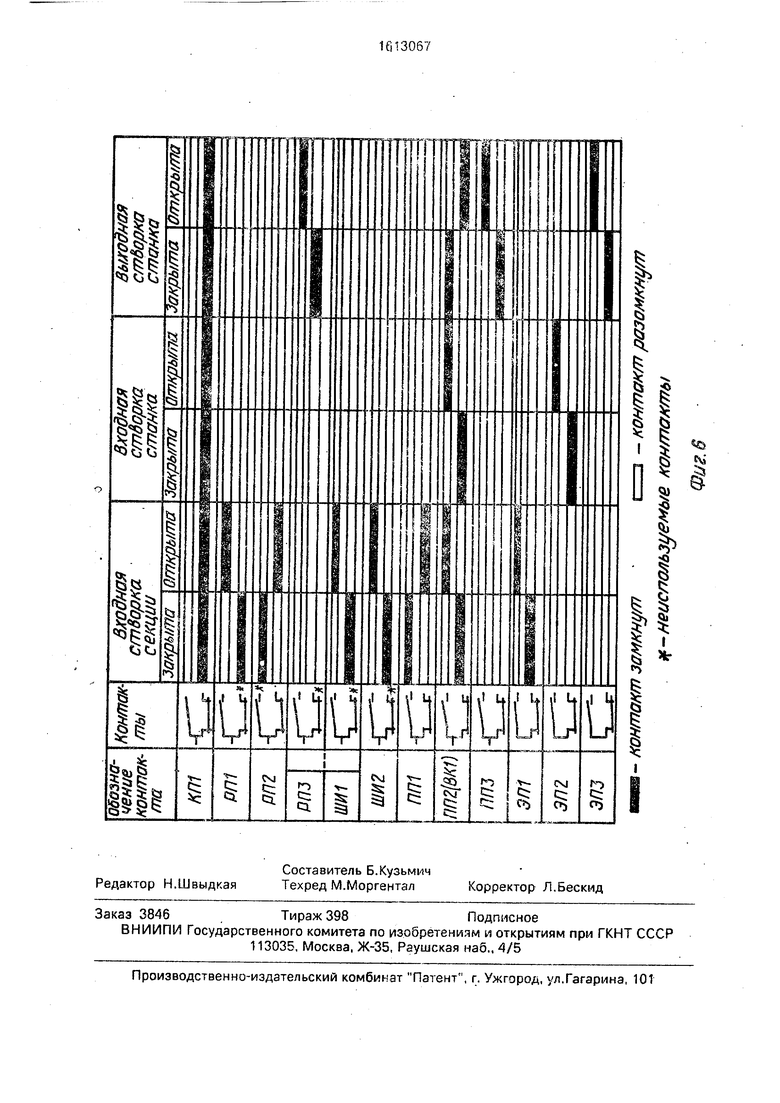
На фиг. 1 представлена доильная установка, план; на фиг, 2 - блок-схема устройства управления одним станком; на фиг. 3 - блок-схема устройства управления группой станков Б секции; на фиг. 4 - принципиальная схема блока управления; на фиг.5 - алгоритм работы блока управления; на фиг. б - диаграмма работы путевых переключателей и промежуточных реле.
Устройство доения коров содержит до- мльную установку (фиг. 1), которая состоит из доильной площадки 1, разделенной на секции и содержащей систему коридоров 2-5, и приямка б для работы операторов, причем по продольным сторонам приямка 6 установлены станки 7 с решетчатым настилом 8 и створками 9 и 10 для впуска и выпуска животных. Система коридоров 2-5 снабжена самозакрывающимися створками 11-14 для выпуска животных с доильной площадки 1 на последоильную площадку 15 или в загон 16.
Между преддоильной площадкой 17 и доильной площадкой 1 установлены створки 18 и 19 для впуска коров в секции площадки 1 по системе коридоров 2 и 3 в станки 7.
Доильный станок (фиг. 2) содержит прикрепленный на шарнире 20 к основанию 21 решетчатый настил 8 с пружиной 22, взаимодействующий с упором 23, створки 9 и 10 (сходную и выходную соответственно), кинематически связанные с пневматическими исполнительными механизмами (пневмоци- линдрами) 24 и 25, соединенными через электропневматические клапаны 26 и 27 и регулирующие клапаны (краны) 28 и 29 с выходами блоков 30 и 31 управления, входы которых соединены с выходами датчиков 32 и 33 в вмде путевых переключателей, являющихся соответственна датчиками положения тяги 34 поршня пневматического силового механизма доильного аппарата 35 м насрила 8. Датчики 33 положения настилов 8 подсоединены к входам блока 36 управления положением входных створок 18 Соля впуска коров в секции), к входу блока 36 подсоединен датчик 37 в виде путевого переключателя положения входных створок 18 секции. Входные створки 18 секции кинематически связаны с пневматическим исполнительным механизмом 38, соединенным через регулирующий клапан (кран) 39 и электропневматическмй переключатель 40 с выходом блока 36 управления.
Доильный аппарат 35 соединен с блоком
41 управления, связанным через проходной
регулирующий клапан 42 с пневматическим
исполнительным механизмом (пневмоцилиндром) 43.
Створки 9, 10 и 18 снабжены ручным механическим приводом 44.
Блок 36 управления (фиг. 3) состоит из суммирующего элемента 45, считающего ко- личество коров, вышедших из станков 7 секции, соединенного через элемент 46 с элементом суммирования 47, (ч лтающе количество коров, вошедших из преддоильной площадки 17 в секцию. 5 Блок 36 управления (фиг. 4) содержит кнопку пуска КП1, реле промежуточные РП1, РП2, РПЗ, путевые переключатели ПП1, ПП2, ППЗ, ВК1, ВКП (по числу станков в секции), электропиевматические переклю- 0 чатели ЭП1, ЭП2, ЭПЗ, шаговые искатели ШИ1 и ШИ2.
Устройство работает следующим образом.
Вначале ручным механическим приво- 5 дом 44 (фиг, 2) открывается входная створка 18 секции. Коровы из преддоильной площадки 17 (фиг. 1) впускаются в коридор 2 секции доильной площадки 1 в количестве, соответствующем числу станков 7, и через 0 входные створки 9 коровы проходят названные станки. При этом настилы 8 (фиг. 2) опускаются до упора 23 и расположенные под настилом 8 датчики 33 положения подают сигнал на блок 30управления, который 5 подает команду на закрытие входных створок 9 станка 7. Оператор, находясь в приямке 6, надевает стаканы доильного аппарата 35 на вымя коровы, предварительно включив блок 41 управления доильным аппара- 0 том.
По окончании молокоотдачи блок 41 управления доильным аппаратом через кран 42 подает сигнал управляющего воздействия на пневматический исполнительный ме- 5 ханизм 43 снятия доильного аппарата 35 с вымени коровы, отключив вакуум от доильных стаканов.,
При снятии доильного аппарата 35 с вымени подвижный элемент 34 (поршень) 50 пневматического исполнительного механизма 43 воздействует на датчик 32, который . подает импульс управляющего воздействия на электропневматический переключатель 27, который через регулирующий клапан 29 55 включает пневматический исполнительный механизм 25 на открытие выходных створок 10 станка 7.
При выходе коровы из станка 7 настил В, закрепленный посредством шарнира 20 на основании 21, под действием пружины 22
разворачиваясь на шарнире 20, поднимается, и датчик 33. связанный с настилом 8 через регулирующий клапан 28 включает исполнительный механизм 24 на закрытие выходных створок 10 станка 7. Вместе с тем названный путевой переключатель через блок управления 30. электропневматический переключатель 26, клапан 28 включает исполнительный механизм 24 на открытие входных створок 9 станка и подает сигнал в блок управления положением входной створки 18 секции.
При поступлении сигнала о наличии свободного станка блок 36 управления подает сигнал управляющего воздействия на злектропневмопереключатель 40 и через клапан 39 включает исполнительный механизм на открытие входных створок 18 секции. При проходе в зоне створки 18 секции корова через штангу воздействует на путевой переключатель 37. подает сигнал на блок 36 управления положением входных створок 18 секции. При равенстве числа свободных станков 7 и коров, прошедших через входные створки 18 секции, последние закрываются.
Если несколько названных станков свободны ,то блок 36 управления до тех пор не подает команды на закрытие входной створки 18 секции, пока в последней не пройдет количество коров, равное числу свободных станков. Для согласования поступления коров в секцию блок 36 управления снабжен суммирующим и разностным злементами.
По аналогии происходит процесс заполнения другой секции доильной площадки, обслуживаемой оператором. Отличие состоит только в том. что впуск коровы осуществляется через створки 19 в коридор 3.
При окончании доения одной группы животных другая группа животных выпускается и в последоильную площадку, например площадку 16. путем изменения пути перемещения животных по коридорам 4 и 5 за счет изменения положения выходных створок 11-14 секций.
Блок 36 управления входными створками 18 секции работает следующим образом. При поступлении импульсного сигнала от датчиков ЗЗгЗЗп настилов 8i-8m суммирующий элемент 45 считает количество поступивших сигналов.
При поступлении импульсов отдатчика 37 входных створок 18 суммирующий элемент 47 считает количество поступивших сигналов.
В качестве сумматоров возможно, например, применение шаговых искателей со встречным включением контактов ламелей. На каждый импульс подвижные контакты
5
перемещаются на один шаг. При равном количестве импульсов от датчиков положения разностный элемент 46 вырабатывает сигнал управляющего воздействия и пода- 5 ет его на электропневмопереключатель 40. который переключает кран 39 на закрытие створок 18 пневматическим исполнительным механизмом 38.
Блоки 30. 31 и 36 и 41 работают по 10 следующей программе.
Пуск системы производится кнопкой КП1. При включении кнопки КП1 замыкается цепь злектропневмопереключателя 40 (ЭП1). последний переключает кран 39, и пневмоци- 15 линдр 38 открывает входные створки 18 секции. Все станки секции заполняются. По заполнении станков цепь электропневмопе- реключателя (ЭП1) разрывается кнопкой КП1. кран 39 переключается и пневмоци- 20 линдр 38 закрывает входные створки 18 секции, Система начинает работать дальше в автоматическом режиме.
Створки 18 входа в секцию закрыты. выходные и входные створки 9 и 10 станков 25 7 закрыты. Настилы 8 в станках опущены. Доильные аппараты 35 надеты на вымя коров. Блок 41 автомата управления доением включен.
Рассмотрим работу доильной установ- 30 ки на примере одного станка.
По окончании доения коровы молоко не поступает в блок управления 41, последний через кран 42 подключает пневмоцилиндр 43 к источнику вакуума. Поршень пневмоци- 35 линдра перемещается и посредством тяг 34 выводит доильный аппарат 35 из-под коровы, при этом вакуум от стаканов доильного аппарата 35 отключен.
При перемещении тяги 34 последняя 40 воздействует на датчик 32 (путевой переключатель ППЗ). который импульсно блокирует цепь реле РПЗ. Реле РПЗ в свою очередь самоблокируется и создает цепь для включения электропневмопереключателя 27 5 (ЭПЗ). что ведет к поступлению вакуума через кран 29 на пневмоцилиндр 25. а последний открывает створку 10. предоставляя возможность корове выйти из станка. Корова выходит из станка, освобождая настил 8. 0 последний, поворачиваясь на шарнире 2о поднимается над основанием 21. отходя от упора 23 за счет усилия пружины 22. воздействует на датчик 33 положения.
Датчик 33 (ПП2) деблокирует цепь реле 5 РПЗ, последнее своими контактами с задержкой на размыкание (например. 3-7 с) разрывает цепь электропневмопереключателя 27. что ведет к поступлению вакуума через кран 29 на пневмоцилиндр 25. а последний закрывает створку 10.
Датчик 33 создает цепь ПГ12 для включения элзктропневмопереключателя 26 (ЭП2), что ведет к поступлению вакуума через кран 28 на пневмоцилмндр 24. а последний открывает створку 9,
Кроме того, при поднйтии настила от датчика 33 создается импульсно (1/60 с) цапь BKi-ВКп для срабатывания шагового искатели Ш1 12, Последний перемещает свой ПОДВИЖ5ШЙ контакт на следующий неподвижный контакт ламели, разорваз тем са- цепь реле РП2. Реле РП2 замыкает нормально замкнутые контакты в цепи реле РП1, последнзе, срабатывая, блокируется своими нормально замкнутыми контактами и включает электропневмопереключатель 10 (ЭП1), что ведет к поступлению вакуума ерез кран 39 на пневмоцилиндр 38. который открывает створку 18. При поступлении импульсных сигналов от нескольких датчиков 33 шаговый искатель ШИ2 перемещает СБОЙ подвижный контакт по ламели на соот- эйтствующее количество шагов, но створка 18 находится в открытом положении.
При нахождении ;1 ивотного в зоне створок 18 последние эоздействуют на датчик 37 (ПП1). При этом импульсно размыкаются контакты в цепи реле РП1 и, замыкаются коитахть в цепи шагоЕОго искателя ШИ1. Шаговый искатель ШИ1 перемещает свой подвижный контакт на один шаг, и при создании цепи между подвижными контактами шаговых искателей ШИ1 и ШИ2 реле РП2 включается. Если же количество шагов шагового искателя ШИ1 меньше количества шаго1а подвижного контакта шагового искателя ШИ2, то цепь для включения репе РП2 не создается, створки 18 при этом не закрываются, т.е. имеются свободные станки. При равенстве освоОодившихся станков 7 и жи-; зотных, поступивших через створки 18 в секцию, количество шагов подвижных контактов шаговых искателей равно, и реле РП2 включается в период длительного импульса от датчика 37 {ПП1) в цепи реле РП1. Реле РП1 деблркируетсл, и цепь электропневмо- переключателп 40 {ЭП1) разрывается, что ведет к поступлению вакуума через кран 39 на пневмоцилиндр 38, а последний закрывает створку 18.
Корова по коридору 2 заходит в станок 7. Настмл 8 под действием массы животного опускается, , поворачиваясь на шарнире 20 относительно основания 21 до упора 23, и сжимает пружину 22. Датчик 33 разрывает цепь ПП2 электропневмопереключателя 26 (ЖП2). что ведет к поступлению вакуума через кран 28 на пневмоцилиндр 24. а юслед- ний закрывает входную створку 9 станка 7.
Доярка, подготовив корову, включает блок 41 управления доением. Затем цикл повторяется.
Развернутый циклический алгоритм ра- боты (программа) блока управления 30, 31, 35 и 41 следуюш,ий (п - количество включенных датчиков положения настила, m - количество срабатываний датчика положения входных створок секции); 1. Устройство включено.
входные створки секции и перейти к действию 4.
действию 12. 12. Конец.
Представленный циклический алгоритм имеет двенадцать действий, на самом деле
число выпоняемых по этому алгоритму действий намного больше, но действия одинаковы, и отличие заключается в том, что большему количеству прошедших через станки животных соответствует и большее
количество шагов шаговых искателей и циклов.
На фиг. 1 представлен алгоритм работы (программа) блоков 30, 31, 36, 41 управления, где ромбами выделены блоки, в которых задается разветвление процесса, а прямоугольниками изображаются блоки, в которых записываются результирующие действия. Выбор одного из двух приемников в каждом случае производится в зависимости от выполнения условия, записанного внутри ромба.
Если условие выполняется, то следует перейти к следующему блоку по стрелке да, если же условие не выполняется, то
нужно перейти к следующему блоку по стрелке нет. От каждого прямоугольника исходит единственная стрелка, так как для каждого результирующего действия всегда существует только один приемник.
Представленный алгоритм может быть реализован полностью на элементах пневмоавтоматики, но требуется большее количество деталей изготавливать по месту.
Использование предлагаемого устройства повышает производительность труда оператора, а соответственно, снижает себестоимость продукции.
Формула изобретения Устройство доения коров, содержащее доильные станки, с впускными и выпускными створками и настилами и систему коридоров с впускными створками секций, снабженными исполнительными механизмами управления их положением, отличающееся тем, что, с целью повышения проtfi
o
5
изводительности труда оператора, оно снабжено датчиками положения настилов доильных станков и впускных створок секций системы коридоров и блоком управления положением впускных створок системы коридоров, а настилы доильных станков выполнены подпружиненными и снабжены упорами, при этом первая группа входов блока управления впускными створками секций системы коридоров соединена с выходами датчиков положения настилов доильных станков, вторая - с выходами датчиков положения впускных створок секций системы коридоров, а выходы блока управления связаны с исполнительными механизмами управления положением впускных створок секций системы коридоров.
Фиа.
Фиг it
Ускр Sjr i-fnS.ce.ii
Закр. Выи стВ. с/л. .дх.ст6. cm ртхр. ex. ст& сек.
( ffOMfflf
| Автоматика на сельскохозяйственных предприятиях | |||
| Справочник | |||
| М.: Россельхо- зиздат | |||
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
| с | |||
| Устройство для отыскания металлических предметов | 1920 |
|
SU165A1 |
