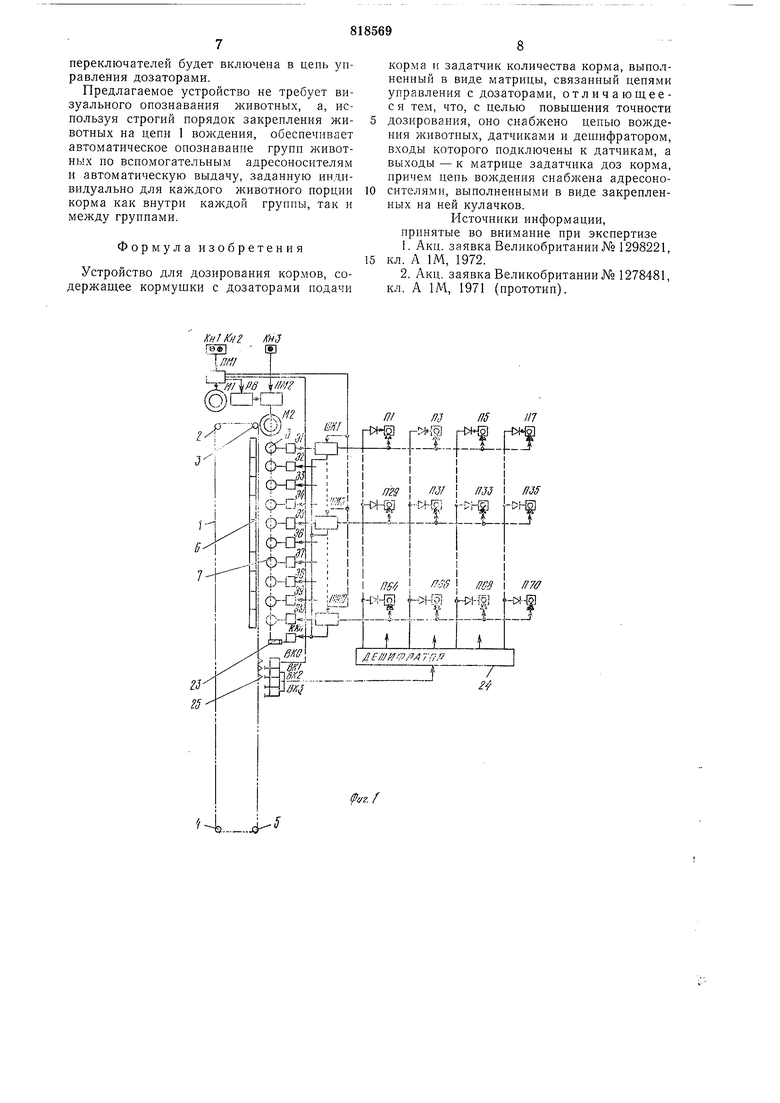
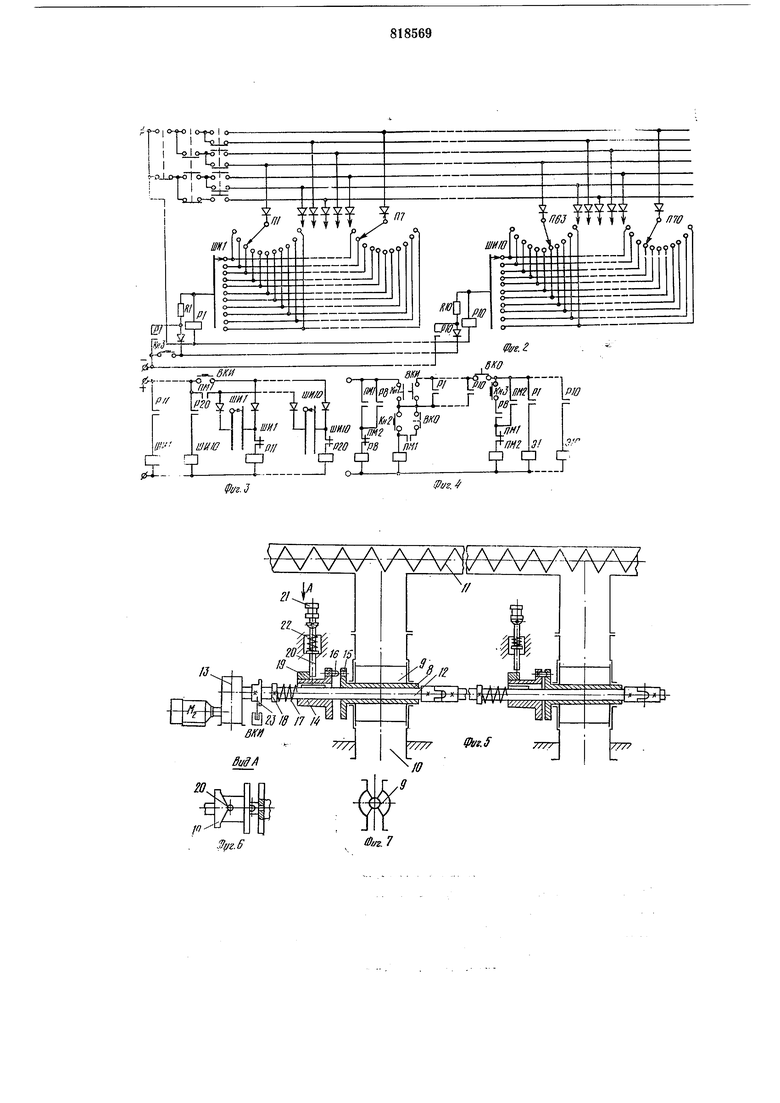
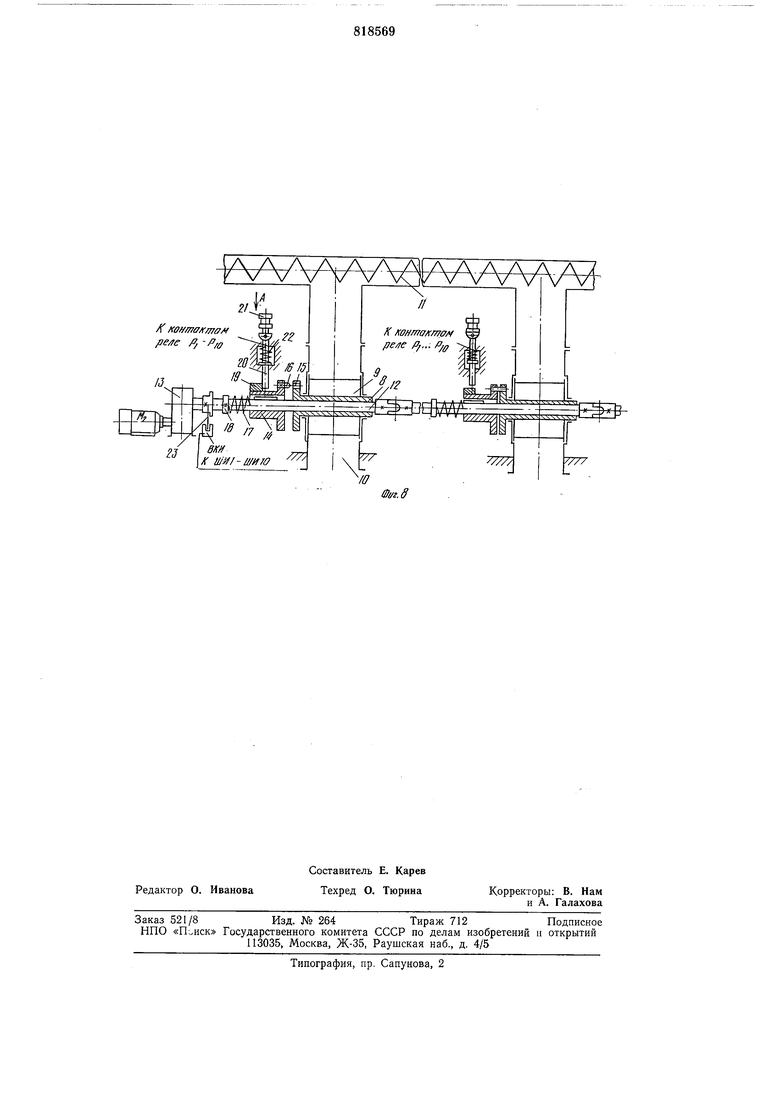
Нажатием на соответствующне контакты матрицы задать причитающуюся ему дозу корма для автоматической выдачи 2. Это устройство требует оператора для его обслуживания, т. е. дополнительной трудоемкости, оно не гарантирует от ошибок дозирования (неправильная выдача дозы корма животному). Эти ошибки связаны с «человеческим фактором, т. е. с возможностью ошибок оператора-неправильное опознание животного, ошибочное включение контактов матрицы и т. и. Вероятность таких ошибок увеличивается в случае больших коровников с десятками и сотнями голов скота и, следовательно, с большим их удалением от пульта управления. Для таких коровников характерна и большая длительность кормления, связанная с необходимостью поодиночного опознания животных. Цель изобретения - новышение точности дозирования и сниженне трудоемкости процесса кормления. Цель достигается тем, что устройство снабжено датчиками, цепью вождения животных с адресоносителями и дешифратором, входы которого подключены к датчикам, а выходы - к матрице задатчика количества корма, а также, что адресоносители выполнены в виде кулачков. На фиг. 1 изображена блок-схема устройства; на фиг. 2 - принципиальная схема устройства; на фнг. 3 - схема включения шаговых искателей; на фиг. 4 - схема цепи реле времени; на фиг. 5 - продольный разрез дозаторов; на фиг. 6 - вид А на муфту управления дозатором; на фиг. 7 - поперечный разрез барабана дозатора; на фиг. 8 - продольный разрез дозатора. Коровиик системы конвейерного содержания скота содержит замкнутую цепь 1 вождения, натянутую на звездочки 2-5. К цепи с ее внешней стороны с помош ью соответствуюш,их иривязей прикрепляются жинотные (не показаны), иЪри движении цепи они передвигаются вместе с цепью. Цепь приводится в движение мотором Ml (фиг. 1). Вдоль внутренней стороны цепи 1 имеются кормушки для скармливания животным грубых кормов и кормушки 6 - для концентрированных кормов. Последние кормушки обычно размещаются в доильном зале и имеют дозаторы 7 для отмеривания и нодачи в них корма. Дозаторы 7 представляют собой поворотные втулки 8 с лопастями 9, установленные в кожухах кормопроводов 10. Корм для дозаторов в кормушки ссыпается из нижней части кормопроводов 10, а поступает в дозаторы - из центрального кормопровода И, проложенного над кормушками 6. Для упрощения не ноказана система нодачи воды, которая нодается обычно вместе с концентрированными кормами для образования пойла. Втулки 8 дозаторов надеты на сочлененный карданный вал 12, который приводится от электродвигателя М2 через редуктор 13. Втулки надеты свободно на вал 12 и соединяются с ним посредством управляемых муфт. Каждая из муфт образована полумуфтой 14, закрепленной на валу 12 с возможностью осевого скольжения вдоль него (на шнонке) н фланцем втулки 8, имеюшей отверстие 15 против штифта 16 полумуфты 14. Пружина 1/, упираясь в выступ 18 вала 12, поджимает иолумуфту 14 ко втулке 8 До упора кулачкового выступа 19 на полумуфте 14 в шток 20, который связан с сердечником 21 одного из электромагнитов Э1-Э10. Под давлением пружины 22 шток 20 этого электромагнита опушен в нерабочее положение. На валу 12 имеется также флаж:ок 23 бесконтактного переключателя ВКИ, который при врашении вала генерирует в переключателе импульс тока. У цепи 1 смонтирован блок датчиков (иутевые выключатели) ВЩ ВК1, ВК2, ВКЗ, из которых ВКО включен в цепь управления мотором Ml привода цепи 1, а остальиые подключены к дешифратору 24, который может быть любой известной конструкции. На цепи 1 установлены адресоносители 25, выполненные, например, в виде кулачков, флажков и т. п., отделяюш,ие одну группу коров от другой. Предварительно все животные разбиты на груииы с числом животных в группе не больше числа кормушек 6, обычло 10-15. Количеством и взаимным расположением адресоиосителей 25 обеспечивается кодирование следуюш;их за адресоносителями групп животных, а датчики ВК1, ВК2, ВКЗ производят преобразование этого кода в электрический сигнал. Показанные на фиг. 1 н 2 три этих датчика обеспечивают в двоичном коде семь различных сочетаний для шифровки семи групп животных, соответствующих семи выходам дешифратора 24. Каждый из выходов дешифратора подключен через развязываюшне диоды к из шин матрицы многопозиционных иереключателей П1-П10, связанной с подвижными контактами этих нереключателей. К каждой шине в нашем нримере подключено по десять переключателей. Неподвижные контакты матрицы нереключателей соединеиы между собой вертикальными (по схеме) шинами и соединены с ламелями шаговых искателей ШИ1-ШП10 и далее через контакты нромежуточных реле - с обмоткамн электромагнитов Э1-Э10 управления дозаторами 7. В цепь шаговых искателей через развязывающие диоды с сопротивлениями 1 - 10 включена пусковая кнонка КнЗ, а ее вторые контакты в цепь пускателя ПМ2 мртоpa привода вала дозатора. В цепь с каждым шаговым искателем включено также одно из реле и совместно с ним образует пульс-пару для периодического срабатывания шаговых искателей при возврате их в начальное положение. Бесконтактный выключатель ВКИ, взаимодействуюший с флажком 23 вала 12, включеи в цепь шаговых искателей для рабочего продвижения их роторов.
Кнопки Кн1, Кн2 в цепи пускателя ПМ1 обеспечивают заиуск двигателя Ml привода цепи 1. При этом ПМ1 включен по схеме самоблокировки и в цепь его нормально открытых контактов включено реле времени РВ. В свою очередь РВ также включено по схеме самоблокировки во включенном состоянии и в цепь его контактов включен пускатель ПМ2 привода дозаторов.
Устройство работает следующим образом.
При нажатии на кнопку Кн2 замыкается цепь пускателя ПМ1 двигателя Ml и цепь 1 приходит в движение. Вместе с нею движутся и коровы, располагавшиеся у кормушек с грубыми кормами. Одновременно контакты пускателя ПМ1 включают реле времени РВ через нормально замкнутые контакты пускателя ПМ2 (фиг. 4), которые становятся на самоблокировку, а нормально замкнутыми контактами ПМ1 разрывается цепь пускателя ПМ2, предупреждая возмол ность включения в этот период электромотора М2 привода дозаторов.
Через некоторое время цепь 1 подведет животных к кормушкам 6 и, когда они займут здесь соответствуюшие места, кулачки 25 также займут положение против датчиков ВКО, ВК1, ВК2, ВКЗ. Датчик ВКО при этом отключит ПМ1, а следовательно, и двигатель Ml, и первая группа животных останется у кормушек 6. Одновременно кулачки-адресоносители 25 вызовут срабатывание датчиков ВК1, ВК2, ВКЗ и на одном из выходных шин дешифратора, образованного ими, появится напряжение. Это напряжение через одну из групп переключателей П1-П10, подключенных к данной шине, подается также на контакты шаговых искателей Ш1-Ш10.
Теперь при нажатии на кнопку КнЗ происходит включение пускателя ПМ2 привода вала 12 дозаторов. При этом нормально закрытый контакт пускателя ПМ2 отключает реле времени РВ, которое с выдержкой времени размыкает цепь кнопки КнЗ, допуская тем самым лишь одноразовое включение этой кнопки.
Одновременно при нажатии на кнопку КнЗ подается питание на реле Р1-Р10 через контакты этой кноики, развязываюшие диоды и сопротивления Р1-Р10. Реле Р1-Р10 после включения становятся на самоблокировку и своими контактами включают электромагниты Э1. Последние своими сердечниками 21 поднимают штоки 20, и полумуфты 14 под действием пружин 17 прижимаются к втулкам 8. Штифты 16 при этом входят в отверстие 15 фланца втулки 8 и втулки начинают врапхаться совместно с валом 12, а лопасти 9 ссыпают корм в кормушки 6.
Врашеиие вала 12 посредством 23 вызывает появление импульсов тока в переключателе ВКИ, которые подаются на шаговые искатели Ш1-Ш10 и продвигают их роторы на шаг за каждый оборот вала 12, начиная от начального положения. Когда ротор соответствующего шагового искателя окажется против неподвижного контакта переключателя П1-П70, то напряжение с выхода дешифратора через этот переключатель и шаговый искатель окажется приложенным к соответствующему добавочному сопротивлению Р1-Р10. При этом реле отключится и отключит соответствующий электромагнит Э1-Э10. Шток 20 под действием пружины 22 опустится и полумуфта 14, набегая своим кулачком 19 на шток 20, отведется от втулки 8 и отсоединит ее от вала 12, т. е. отключит дозатор. По мере переключения шаговых искателей Ш1-Ш10 постепеиио аналогичным о разом отключатся все дозаторы в зависимости от установки переключателей П1-П70. Количество корма, выданное каждым дозатором, будет пропорционально числу совершенных им оборотов или, другими словами, положению подвижного контакта соответствующего переключателя П1-П70. Если эти переключатели имеют десять положений, очевидно, ими можно задавать максимальную дозу корма, определяемую десятью оборотами дозатора, а мииимальную - одним оборотом.
Когда все дозаторы постепенно отключатся, реле Р1-Р10 также отключатся, цепь пускателя ПМ2 разорвется и мотор М2 привода вала 12 дозаторов остановится.
После дойки первой группы коров и поедания ими корма виовь нажимают кнопки Кн1 и Кн2, включая привод цепи 1, и одна группа коров выводится из доильного зала, а другая вводится. За это время шаговые искатели возвращаются в исходное полол еиие. Их срабатывание обеспечивается через цепь, включающую обмотки реле Р11-Р20, нормально замкнутые контакты шаговых искателей ШИ1-ШИ10, контактные ноля со сплошным сектором этих искателей и нормально открытые контакты пускателя ПМ1 (фиг. 3).
После остановки цепи 1 устройство готово для выдачи корма новой группе животных. Эта операция производится также и ранее, за исключением того, что датчики ВК1, ВК2, ВКЗ обесиечат появление сигнала на другом выходе дешифратора И другая группа переключателей П1-П70 матрицы
переключателей будет включена в цепь управления дозаторами.
Предлагаемое устройство не требует визуального опознавания животных, а, используя строгий порядок закрепления животных на цепи 1 вождения, обеспечивает автоматическое опознавание групи животных по вспомогательным адресоносителям и автоматическую выдачу, заданную индивидуально для каждого животного порции корма как внутри каждой группы, так и между группами.
Формула изобретения
Устройство для дозирования кормов, содержащее кормушки с дозаторами подачи
корма и задатчик количества корма, выполненный в виде матрицы, связанный цепями управления с дозаторами, отличающеес я тем, что, с целью повышения точности дозирования, оно снабжено цепью вождения животных, датчиками и дешифратором, в.ходы которого подключены к датчикам, а выходы - к матрице задатчика доз корма, причем цеиь вождения снабжена адресоносителями, выполненными в виде закрепленных на ней кулачков.
Источники информации, принятые во внимание при экспертизе
1.Акц. заявка Великобритании № 1298221, кл. А 1М, 1972.
2.Акц. заявка Великобритании № 1278481, кл. А 1М, 1971 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ВПТБ | 1973 |
|
SU390553A1 |
| Программный регулятор для управления циклической работой станков | 1961 |
|
SU145809A1 |
| АВТОМАТИЧЕСКИЙ ДОЗАТОР КОРМОВ ДЛЯ ЖИВОТНОВОДЧЕСКИХ ФЕРМ | 1969 |
|
SU251999A1 |
| ПРИБОР ДЛЯ ИСПЫТАНИЯ ТКАНЕЙ НА СДВИГ | 1973 |
|
SU382954A1 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ НАРУЖНЫМ ОСВЕЩЕНИЕМ | 1960 |
|
SU143864A1 |
| Устройство для нормированной раздачи жидкого корма | 1988 |
|
SU1606062A1 |
| Устройство для герметизации устья скважины | 1984 |
|
SU1244286A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ ЖГУТОВ ЭЛЕКТРИЧЕСКИХ ПРОВОДОВ | 1960 |
|
SU134332A1 |
| Устройство для автоматического вождения машинно-тракторных агрегатов | 1986 |
|
SU1386066A1 |
| Устройство для управления стиральной машиной | 1959 |
|
SU126856A1 |
4-...
if-O I 0-9-0 I 0-M I о I I1 W
I I Loio-+o-To.
I I I kb
I .
Ll
1 4i I g-о Hj-frO W M/ .w га ПМ С 9 JJ - -4-WW AAggVW -7tvA;fHi-i; f f ,/./r f.2 ...
