Изобретение относится к машиностроению, а именно к средствам контроля зубча- тых колес.
Цель изобретения - повышение точности путем обеспечения возможности исключения из результата контроля погрешности входящих в устройство кинематических цепей при широком диапазоне действующих нагрузок на выходном валу.
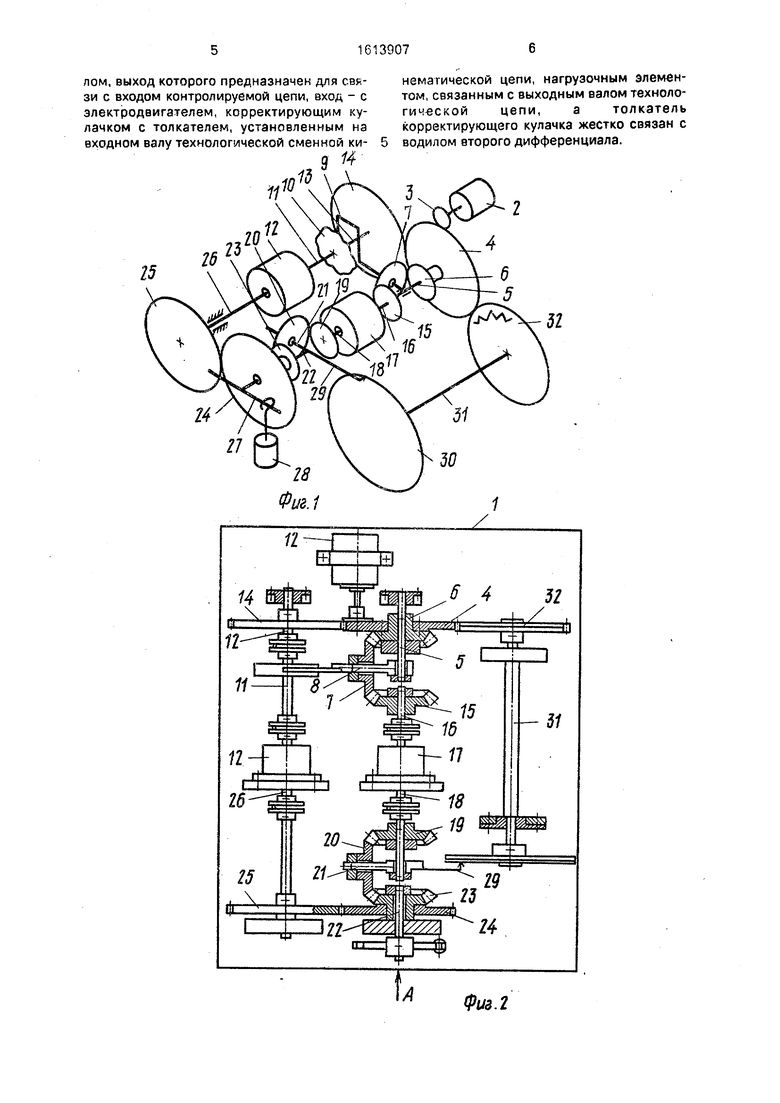
схема Рл кинематическая схема предлагаемого устройства для контроля кинематической погрешности и мертвого хода кинематических цепей; на фиг 2- конструктивная схема устройства,- на фиг 3 - вид А на фиг. 2.
Устройство включает в себя корпус 1 В корпусе 1 размещен электродвигатель 2 на выходном валу которого жестко закреплено зубчатое колесо 3. находящееся в зацеплении с зубчатым колесом 4. На валу 5 жестко установлено коническое зубчатое колесо 6 являющееся центральным колесом диффе ренциала (второго), находящееся в зацеплении с колесом-сателлитом 7. размещенным
со свободой вращения на водиле 8. выполненном в виде рычага, один конец которого размещен со свободой вращения на валу 5 а другой рычаг, являющийся толкателем 9 корректирующим кулачок 10. жестко установлен на валу 11. соединенном с входным валом технологической сменной кинематической цепи 12, причем на валу 13 являющемся продолжением вала 11 жестко установлено зубчатое колесо 14. находящееся в зацеплении с зубчатым колесом 4 Профиль корректирующего кулачка 10 выполнен пропорциональным кинематической погрешности всей кинематической цепи устройства (без контролируемой цепи) Зубчатое колесо 7 находится в зацеплении с коническим зубчатым колесом 15. являющимся вторым центральным колесом дифференциала (второго), установлено жестко на входном валу 16 контролируемой зубчатой цепи 17, на выходном валу 18 которой жестко закреплено коническое зубчатое колесо 19 (центральное колесо первого дифференциала), находящееся в зацеплении с
Os
СА Ю
10
15
конмческмм зубчатым колеср сателл1/иом 20 размещенным со свободой вращения иэ глгжле 21, выполненном в заде вапз. с которым жестко, связан вал 22. причаи оси 21 и вала 22 взаимно пзрпендику- лярны. На валу 22 размещены со сво&одои Еоащений коническое зубчатое 23 (второе центральное колесо первого дифференциала) и жестко с Hi/iM связанное зубчатое колесо 24. находящееся в зацепленном состоянии с зубчатым колесом 25, установленным жестко на взлу 26 сменной технологической ,.епУ112. С валом 22 жестко связан дБуплечш рычаг 27. ось которого перпендикулярна оси вала 22, на котором размещен г.енный груз 28. Продолжением водила 21 является стрелка-самописец 29 регистрато- 3 экран 30 которого .жестко установлен на валу 31, на котором х есткоустановле.но зубчатое колесо 32 с люфтовыбирэтелем. находящееся 8 зацеплени./ с зубчатым колесом 4. Устройство работает следующим oDpaзом.
в устройство устанавливаются контролируемая цепь 17. входной вал которой со- ециняется с валом 16, а выходной - с Ба.лом 18 а также сменная технологимеская цепь 12 паоаметры шторой аналогичны пара- iv ieVpaM контролируемой цепи 1 7, а также сменный корректирующий кулачок }, поофипь которого Еыпслнен пропорциональны кинематической погрешносп це- устройстЕа. Сменный rpyS 28 размещен на ОГ4НОМ из плеч, (в заЕ1лС5 мости ст того, какая из сторон цепи 17 коктрол фуатся; оммага 27. Вес груза 28 определяет величину нагрузочного момента на выходной вщ контролируемой uenvi 17, причем нагрузочный момент создается благодаря довороту рычага 27. а вместе с ним вала 22 и водила 21 которое доворачиваясь, поворачивает м колесо-сатеплит относительно зубчатого колеса 19, что создает на валу 18, а соотвэта- венно, VJ на выходном валу контролируа -ои цепи нагрузочный момент. ЭлектродЕИ.га- тепь 2 приводи- во врзщение через зуЬ тые колеса 3, 4. 14 и 32 все эле пэиты
устоойства,
В результате доворота колеса-сателлита 7 обеспечивается поворот водила 8, причем поворот водила 8 соответствует перемеш.ению толкателя 9,. которое обусловливается профилем корректмруюа ею ,, улачка 10, компенсирующего кинемат.че- скую погрешность всех элементов устроист- ва и кинематических цепей, их связывающих. Угол поворота входного вала контролируемой цепи , а угол поворэга выходного вала контролируемой цепи 1.
Us
+ Aip2k,
-JSK
(дэ IJaK - передаточное число контролируегч Юй цепи;
A.p2k - кинематическая погрешность
контролируемой цепи.
При отсутствии кинематической погрешности в контролируемой цепи 17 водило 21 неподвижно и стрелка-самописец 2J пегистратора описывает на экране 30 ок- р жность, радиус которой соответствует ве- ci установленного груза 28. Наличие кинематической погрешности контролируемой цеп1л 17 вызывает доворот, соответствующий величине кинематической погрешности зубчатого колеса 19 и находя- ще-ося с ним в зацеплении колеса-сателлита 20 s OTOpoe, перемещаясь по венцу зубчатых ко.лес 19 и 23, поворачивает води- .4 21 и соотзетственно стре.пку-самописец 90 Отклонение стрелки-самописца 29 от ок- р жности и есть вег.ичина кинематичвскои погрешности. Полный оборот экрана 30 соответствует замеру кинематической погрешности при повороте выходного вала на
° °с тзню°ви8 тот же груз 28 (по весу) на mwroFv , плече рычага 27 и проделав анало- гу1-1ные измерения при вращении злектро- г.вигателя 2 в другую сторону, получаем величину ки змaтичscкoй погреижости, соответствующей второй стороне зубчатых по- аепхноггей контролируемой цепи 17.,
Разность между кривой, записанной пои измерении и кривой, записан- мой при втором измерении, является величиной мертвого хода цепи, соответствующего угловлзму положению ведомого вала от О до 360°.
5
С п
40
45
50
55
Формула изобретения Устройство для контроля кинематической погрешности и мертвого хода кинематических цепей, содержащее «Р ование электродвигатель, установленный на нем и к-.1чематически связанный с контролируе- ой кинематической цепью, дифференциал, предназначенный для связи с выходным валом кинематической цепи, и регистратор,. кинематически связанный с дифференциа- , от л и ч а ю ще ес я тем, что, с целью повышений точности путем обеспечения «оап ожности исключения из результат а контроля погрешности входящих в устройство кинематических, цепей при широком пиапазоне действующих нагрузок на выходном валу, оно снабжено технологической кинематической цепью, аналогичной контролируемой, вторым дифференциалом, выход которого предназначек для свк-немагической цепи, нагрузочным элемензи с входом контролируемой цепи, вход - стом, связанным с выходным валом технолоэлектродвигателем, корректирующим ку-гич ской цепи, а толкатель
лачком с толкателем, установленным накорректирующего кулачка жестко связан с
входном валу технологической сменной ки-5 водилом второго дифференциала.
9 /4
Физ.2
д28
Фив.д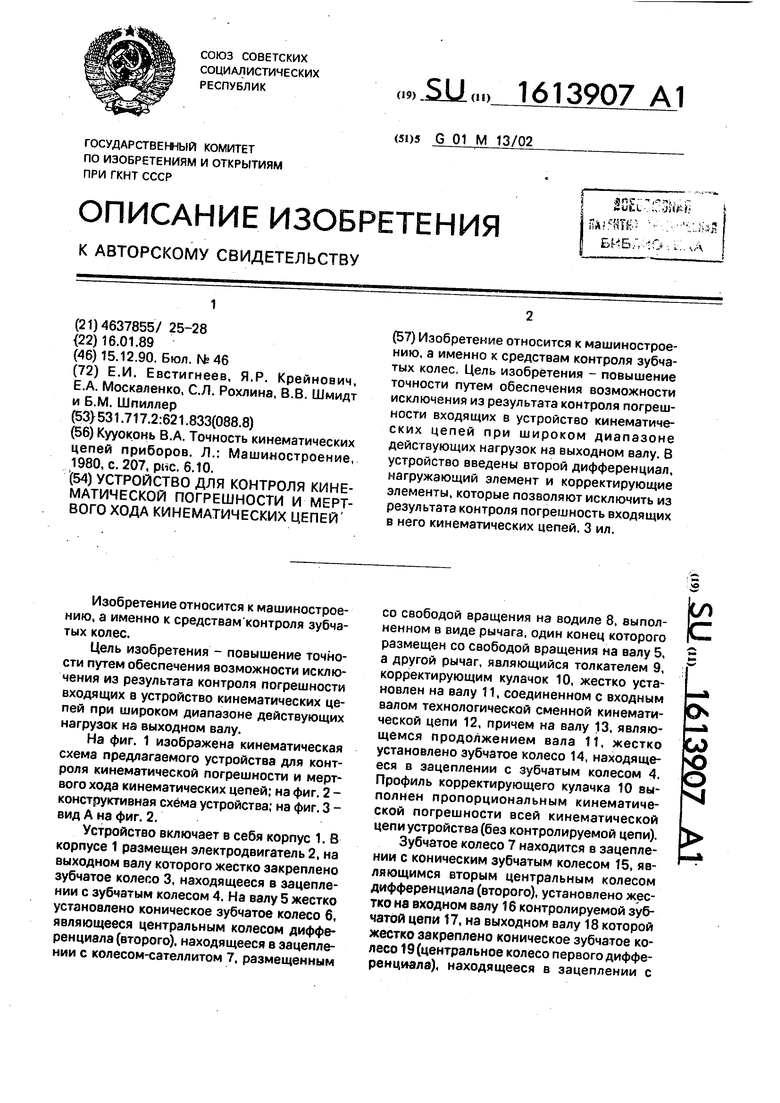

| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания зубчатых механизмов | 1988 |
|
SU1567911A1 |
| Стенд для обкатки и испытания зубчатых механизмов | 1987 |
|
SU1460642A1 |
| ПРИВОД С ЗАМКНУТОЙ КИНЕМАТИЧЕСКОЙ ЦЕПЬЮ | 1995 |
|
RU2105912C1 |
| Устройство для шлифования и полирования поверхностей тел вращения переменной кривизны | 1986 |
|
SU1346398A2 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1990 |
|
SU1758415A1 |
| ПЛАНЕТАРНЫЙ ЗУБЧАТЫЙ РЕДУКТОР | 2012 |
|
RU2498128C1 |
| УСТРОЙСТВО ДЛЯ КОРРЕКЦИИ ПЕРЕДАТОЧНОГО ОТНОШЕНИЯ КИНЕМАТИЧЕСКОЙ ЦЕПИ ТОКАРНО-ВИНТОРЕЗНОГО СТАНКА | 1994 |
|
RU2069605C1 |
| СТАНОК ДЛЯ ОБРАБОТКИ ЦИКЛОИДАЛЬНОГО ПРОФИЛЯ ЗУБА ПРЯМО- И КОСОЗУБЫХ ЦИЛИНДРИЧЕСКИХ ЦИКЛОИДАЛЬНЫХ ЗУБЧАТЫХ КОЛЕС | 2018 |
|
RU2688114C1 |
| УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД (ВАРИАНТЫ) | 2006 |
|
RU2307278C1 |
| Стенд для определения КПД зубчатых механизмов | 1988 |
|
SU1615590A1 |

Изобретение относится к машиностроению, а именно к средствам контроля зубчатых колес. Цель изобретения - повышение точности путем обеспечения возможности исключения из результата контроля погрешности входящих в устройство кинематических цепей при широком диапазоне действующих нагрузок на выходном валу. В устройство введены второй дифференциал, нагружающий элемент и корректирующие элементы, которые позволяют исключить из результата контроля погрешность входящих в него кинематических цепей. 3 ил.
