


| название | год | авторы | номер документа |
|---|---|---|---|
| Инфузионный насос | 1985 |
|
SU1279635A1 |
| Устройство для точного останова электропривода | 1984 |
|
SU1182618A1 |
| Устройство для импульсно-фазового управления трехфазным тиристорным регулятором напряжения | 1987 |
|
SU1598081A1 |
| Устройство для точного останова электропривода | 1985 |
|
SU1272447A1 |
| Способ выявления асинхронного режима электропередачи | 1989 |
|
SU1663691A1 |
| Устройство для управления весовым дозатором | 1984 |
|
SU1272313A1 |
| Электрогидравлический следящий привод | 1988 |
|
SU1645659A1 |
| Позиционный электропривод | 1982 |
|
SU1084727A1 |
| Устройство для импульсно-фазового управления преобразователем | 1984 |
|
SU1169114A2 |
| Вентильный электродвигатель | 1985 |
|
SU1336186A1 |
Изобретение относится к электротехнике, а именно к автоматизированному электроприводу с точным остановом. Цель изобретения - повышение быстродействия электропривода. Устройство содержит последовательно соединенные командный блок 1, задатчик 2 интенсивности, сумматор 3, блок 4 регулирования скорости электропривода, датчик 5 скорости, ключ 6, блок 7 замедления, а также ключ 22, подключенный к командному блоку 1. За счет автоматического выбора момента окончания разгона и начала замедления при осуществлении точной остановки электропривода обеспечивается повышение его быстродействия. 3 ил.
:Os
1 О 00
О
Изобретение относится к электротехнике, а именно к автоматизированному электроприводу промышленных установок, требующих точного останова.
Цель изобретения - повышение быстродействия.
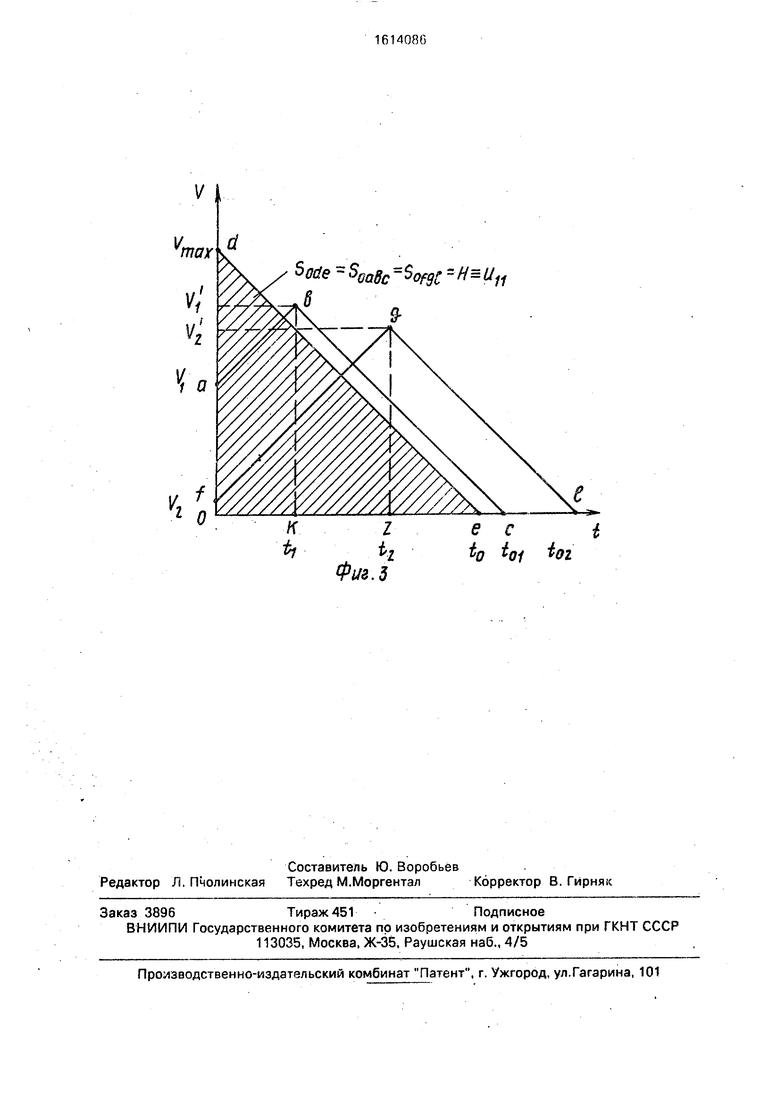
На фиг. 1 приведена структурная схема устройства; на фиг. 2 - структурная схема блока замедления; на фиг. 3 - диаграммы скорости устройства при замедлении.
Устройство содержит последовательно соединенные командный блок 1, задатчик 2 интенсивности, сумматор 3, блок 4 регулирования скорости электропривода,датчик 5 скорости, ключ 6, блок 7 замедления, первый выход 8 которого соединен с вторым входом сумматора 3, а второй выход 9 - с первым входом командного блока 1, второй выход которого соединен с вторым входом ключа 6 и вторым входом 10.блока 7 замедления, третий вход 11 которого предназначен для подключения к источнику постоянного входного сигнала.
Блок 7 замедления образуют инвертирующий усилитель 12, первый ключевой элемент 13, триггер 14, усилитель 15, квадратор 16, последовательно соединенные интегратор 17, первый 18 и второй 19 сумматоры, второй ключевой элемент 20, выходом соединенный с первым выходом 8 блока 7 замедления, подключенного третьим входом 11 к второму входу первого сумматора 18, вторым выходом 9 - - к второму входу второго ключевого элемента 20 и через триггер 14 к выходу второго сумматора 19. Блок 7 замедления первым входом 21 подключен к первому входу 17 и через последовательно соединенные квадратор 16 и усилитель 15 к второму входу второго сумматора 19, а вторым входом 10 подключен через инвертирующий усилитель 12 к первому входу первого ключевого элемента 13, второй вход которого соединен с выходом интегратора 17, второй вход которого соединен с выходом первого ключевого элемента 13.
Устройство содержит также ключ 22, вход которого соединен с вторым выходом командного блока 1, а первый и второй выходы ключа 22 соединены со вторым «третьим входами командного блока 1.
Устройство работает следующим образом.
В зависимости от скорости электропривода возможны два режима замедления. В первом режиме устройство обеспечивает замедление и точную остановку электропривода при скорости, меньшей максимальной, а во втором - при максимальной скорости электропривода.
0
Для обеспечения оптимальности.по быстродействию электропривода величина пути замедления Н должна определяться значением максимальной скорости VMBKC и максимального ограничиваемого ускорения С.
Согласно диаграмме скорости (на фиг. 3 V - скорость электропривода, t - время) величина пути замедления Н равна площади треугольника Sode и определяется максимальными значениями скорости и ускорения:
5
0
5
0
5
Н
Умакс 2С
Напряжение Un на третьем входе блока 7 замедления пропорционально величине пути замедления Н. Так как путь замедления для выбранных параметров постоянный, то с учетом его значения датчик импульса замедления устанавливается на пути движения рабочего органа.
При скорости электропривода v , меньшей Умакс (фиг. 3), для повышения быстродействия электропривода при.останове после срабатывания датчика импульса замедления скорость электропривода вначале увеличивается с максимальным ограничиваемым ускорением до величины Vi , а затем уменьшается до нуля, при этом путь замедления Н равен площади, ограниченной кривой Soabc;.
Н Soabk + Skbc hi + h2,
где hi - путь ускоренного движения с ускорением больше нуля;
h2 - путь замедления с ускорением меньше нуля.
При этом
ь г hi
dt;
h2 Тогда
(vil
2С
V1 -t-Vi
dt +
Ml 2C
или
0
5
H-hi-h2 0.
При этом условии выдается сигнал на замедление блоком 7 замедления.
Напряжение, пропорциональное hi, формируется на выходе интегратора 17, а пропорциональное h2 - на выходе усилителя 16.
Поэтому Uii - Ui7 - Ui5 0. При выполнении этого равенства срабатывает триггер 14, так как он имеет характеристику /О при Ui9 0; Ei4 при Ui9 О, где Ei4 - напряжение, определяемое источником питания.
Ul4
Устройство в первом режиме работает следующим образом,
При подаче сигнала Пуск от первого выхода командного блока 1 на выходе задатчика 2 интенсивности, формируется на- пряжение задания скорости, которое подается через сумматор 3 с характеристикой из. U2 + Us на блок 4 регулирования скорости электропривода, разгоняя его до скорости, определяемой амплитудой сигна- ла на выходе командного блока 1. При подходе рабочого органа электропривода к датчику импульса замедления (не показан) последний срабатывает и командный блок 1 в точке t О (фиг. 3) выдает на своем втором выходе сигнал
.. 2 fO при t 0;
ЧЕ1 , где Ei - напряжение, определяемое источником питания.
Этот сигнал подается на ключ б, который замыкается и подключает сигнал датчика 5 скорости на вход 21 блока 7 замедления, на второй вход 10 блока 7 замедления и далее через инвертирующий усилитель 12 на ключевой элемент 13, который размыкается и подготавливает интегратор 17 к работе.
Кроме того, сигнал Ui со второго выхода командного блока 1 подается на ключ 22, который замыкается и производит изменение в командном блоке 1 задания скорости, электропривода до максимального значе-ч ния. При этом амплитуда сигнала на первом выходе командного блока 1 увеличивается до величины, соответствующей максимальной скорости электропривода, и на выходе задатчика 2 интенсивности формируется напряжение задания максимальной скорости электропривода, которое подается че- рез сумматор 3 на блок 4 регулирования .скорости электропривода. Электропривод начинает разгоняться.
Напряжение от датчика 5 скорости подается на интегратор 17. Напряжение на выходе интегратора 17.
/U5dt Ki7U5t
о
и подается на сумматор 18, имеющий характеристику Uis Uii - Ui7.
Напряжение Us подается также через квадратор 16 с характеристикой Uie (Us) и через усилитель 15 с характеристикой Ui5 Ki5Ui6 - на сумматор 19.
Коэффициент передачи Ki5 усилителя 15 определяется с учетом ограничиваемого
значения ускорения С (Kis ) и для
5 10 . 15
20
25
30 35 40
5
0
5
данного электропривода остается постоянным.
Поэтому
Ul5 Kl5(U5)2 iy.
Напряжение с выхода сумматора 19 с характеристикой Uig Uis - Uii5 подается на триггер 14. При работе интегратора 17 на- пр.яжение на выходе сумматора 18уменыиа-. ется. Уменьшается при этом и напряжение на выходе сумматора 19.
При Ui9 Uii - Ui7 - Ui5 О триггер 14 переключаетс.я и на его выходе устанавливается напряжение Ei-q, которое подается на командный блок 1 ключевой элемент 20. Командный блок 1 снимает сигнал задания скорости с задатчика 2 интенсивности (фиг. 3, момент t ti), разгон электропривода прекращается и начинается торможение по линии вс, а ключевой элемент 20 замыка- ется и подключает сигнал выхода сумматора 19 на вход сумматора 3. Момент начала торможения в точке в определяется автоматически блоком 7 замедления с учетом расстояния до конечной точки останова и скорости электропривода. При постоянней величине ускорения в режиме замедления линии вс прямая и сигнал на выходе сумматора 19 равен нулю. В случае возмущения по темпу уменьшения скорости при торможении равенство Uii - Uiy- Uis О нарушается, т.е. Ui9 0. Напряжение с выхода сумматора 19 а виде сигнала коррекции подается на сумматор 3 и вызывает изменение скорости электропривода до момента, пока Ui9 не станет разным нулю. Таким образом, стабилизируется также ускорение при торможении (приведенный на фиг. 3 график изменения скорости при торможении дан при ее начальном значении).
При работе устройства во втором режиме скорость электропривода равна максимальной, т.е. такой, для которой рассчитан путь замедления Н.
Пуск и работа электропривода производится по сигналу командного блока 1 аналогично рассмотренному. При срабатывании датчика импульса замедления командный блок 1 вьгдает сигнал на переключен; ;е ключей 6, 13 и 22. Ключ 22 не изменяет сигнала задания скорости, так как этот сигнал во втором режиме равен максимальному значению. При замыкании ключа 6 сигнал датчика 5 скорости, пропорциональный максимальной скорости Умакс подается через квадратор 16 (фиг. 2) и усилитель 15 на вход сумматора 19. Напрях ен1ле на выходе сумматора 19 становится равным нулю( О, так как напряжение Uis Uii (т.е. при
Умакс выполняется равенство
триггер 14 переключается и выдает сигнал на командный блок 1, который снимает сигнал задания скорости с задатчика 2 интенсивности (фиг. 3, t 0), и начинается торможение электропривода по линии de, а также замыкается ключевой элемент 20.
В этом режиме момент начала замедления также осуществляется автоматически блоком 7 за медления.
Размыкание ключевого элемента 13 и подача сигнала датчика 5 скорости приводит к работе интегратора 17, увеличение напряжения на выходе которого обеспечивает выполнение равенства Uig 0. При этом напряжение Uig через замкнутый ключевой элемент 20 подается на сумматор 3, что (аналогично рассмотренному выше) позволяет стабилизировать ускорение при торможении электропривода.
Таким образом, устройство обеспечивает минимальное время периода замедления
формированием по оптимальному закону диаграммы скорости при замедлении электропривода путем автоматического выбора момента окончания разгона и начала замедления и осуществлении точной остановки электропривода, а также ограничение динамических нагрузок, исключение колебательных процессов за счет стабилизации ускорения замедления. Это повышает быстродействие электропривода.
Формула изобретения
Устройство для точного останова элект- ропривода по авт. св., hk 1182618, отличающееся тем, что, с целью повышения быстродействия электропривода, в него дополнительно введен ключ, а командный блок снабжен двумя дополнительными вхо- дами, при этом вход ключа соединен с вторым выходом командного блока, а первый и второй выходы ключа соединены с дополнительными входами командного блока.
may
ode /f
01
01
| Устройство для точного останова электропривода | 1984 |
|
SU1182618A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
