2. Устройство по п.1, о т л и чающееся тем, что блок замедления содержит инвертирующий усилитель, первьй ключевой элемент, (3-триггер, ус титель, квадратор и последовательно соединенные интегратор, первый сумматор, второй сумматор, второй ключевой элемент, выходом соединенньм с первым выходом блока замедления, подключенного третьим входом к второму входу первого сумматора, вторым выходом - к второму входу второго ключевого элемента, а
также через 3 -триггер - к выходу второго сумматора, блок замедления первым сходом подключен к первому входу интегратора, а также через последовательно соединенные квадратор и усилитель - к второму входу второго сумматора, вторым входом подключенного через инвертирующий усилитель к первому входу первого ключевого элемента, второй вход которого соединен с выходом интегратора, второй вход которого соединен с выходом первого ключевого элемента.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для точного останова электропривода | 1985 |
|
SU1272447A1 |
| Устройство для точного останова электропривода | 1988 |
|
SU1614086A2 |
| Устройство автоматического управления стана с порезкой проката на ходу | 1973 |
|
SU617188A1 |
| Электропривод с оптимальным управлением | 1987 |
|
SU1534719A1 |
| Электропривод отрезного устройства | 1982 |
|
SU1058726A1 |
| Позиционный электропривод | 1982 |
|
SU1084727A1 |
| Задатчик скорости | 1984 |
|
SU1234809A1 |
| Устройство для задания скорости электропривода | 1982 |
|
SU1026266A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1993 |
|
RU2050686C1 |
| Устройство формирования программы работы электропривода шахтной подъемной установки | 1987 |
|
SU1578077A1 |
1. УСТРОЙСТВО ДЛЯ ТОЧНОГО ОСТАНОВА ЭЛЕКТРОПРИВОДА, содержащее последовательно соединенные командньй блок и задатчик интенсивности, блок регулирования скорости электропривода, отличающееся тем, что, с целью повьшения надежности и быстродействия электропривода, в него дополнительно введены подсоединенные к выходу блока регулирования скорости электропривода последовательно соединенные датчик скорости, ключ, блок замедления, сумматор, второй вход которого соединен с выходом задатчика интенсивности, а выход - с блоком регулирования скорости электропривода, второй выход i командного блока соединен с вторым входом ключа и вторым входом блока (Л замедления, второй выход которого соединен с входом командного блока, а третий вход - с источником постоянного входного сигнала. 00 Од 00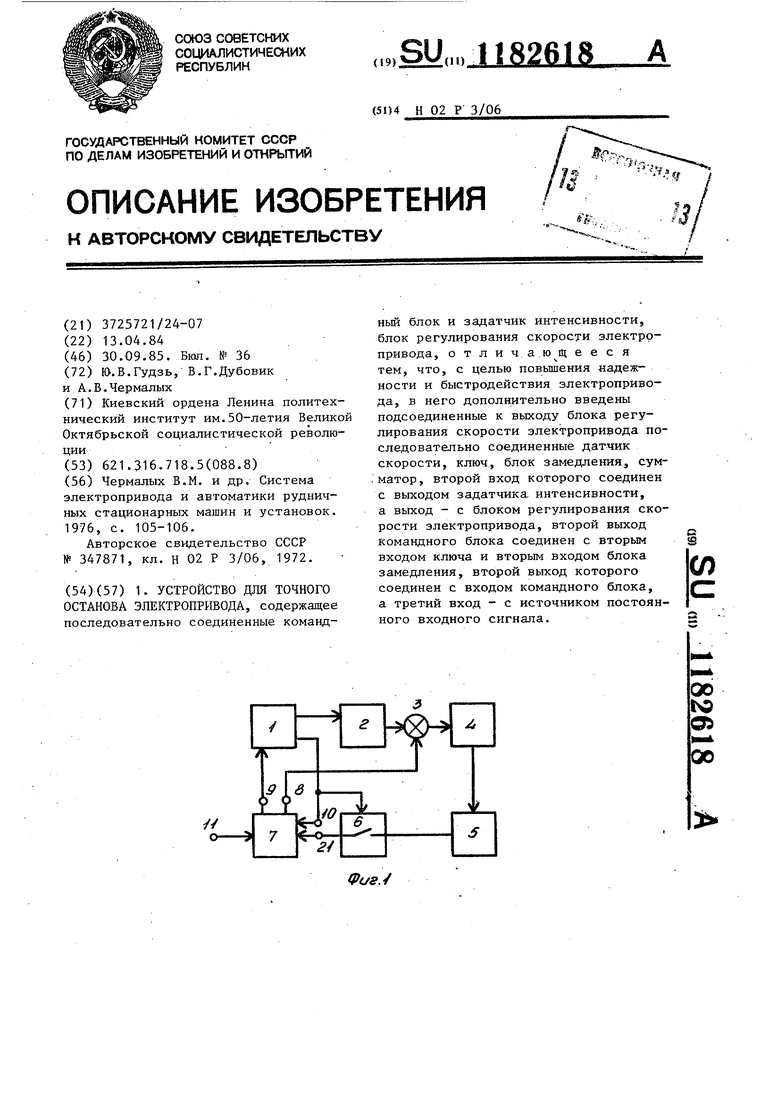
1
Изобретение относится к электротехнике и может быть использовано в автоматизированном электроприводе различных промьшленных установок, требующих точного останова.
Целью изобретения является повышение надежности и быстродействия электропривода.
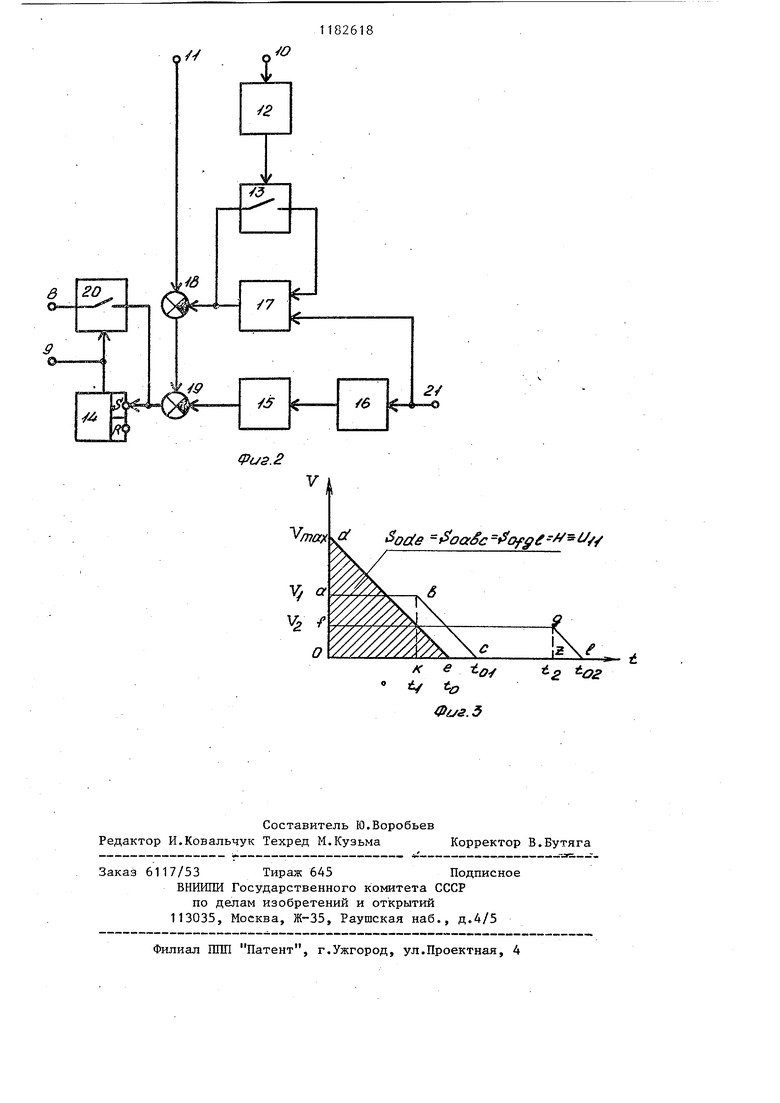
На фиг.1 представлена структурная схема устройства; на фиг.2 - то же, блока замедленияJ на фиг.З - диаграммы скорости устройства при замедлении.
Устройство содержит последовательно соединенные командньй блок 1, задатчик 2 интенсивности, сумматор 3, блок 4 регулирования скорости электропривода, датчик 5 скорости, ключ 6, блок 7 замедления, первьй выход 8 которого соединен с сумматором 3, а второй выход 9 - с входом командного блока 1, второй выход которого соединен с вторым входом ключа 6 и вторым входом 10 блока 7 замедления, третий вход 11 которого связан с источником постоянного входного сигнала.
Блок замедления (фиг.2) содержит инвертирукмций усилитель 12, первьй ключевой элемент 13, К-5 -триггер 14 усилитель 15, квадратор 16, последовательно соединенные интегратор 17, первый сум1 1атор 18, второй сумматор 19, второй ключевой элемент 20, выходом соединенньй с первым выходом 8 блока 7 замедления, подключенно1 о третьим входом 11 ко второму входу первого cy мaтopa, вторым выходом
9- к второму входу второго ключевог элемента 20, а также через R-5-триггер 14 - к выходу второго сумматора 19, блок 7 замедления, первым входом 21 подключенньй к первому входу интегратора 17, а также через последовательно соединенные квадратор 16
и усилитель 15 - к второму входу второго сумматора 19, а вторым входом
10подключен через инвертирующий усилитель 12 к первому входу первого ключевого элемента,- второй вход которого соединен с выходом интегратора 17, второй вход которого соединен с выходом первого ключевого элемента 13.
Устройство работает следующим образом.
В зависимости от скорости электропривода возможны два режима замедления. В первом режиме устройство обеспечивает замедление и точную остановку электропривода при скорости меньшей максимальной, а во втором - при максимальной скорости электропривода.
Для обеспечения оптимальности по быстродействию электропривода величина пути замедления Н должна определяться значением максимальной скорости V и максимального ограничивае(паи мого ускорения С.
Согласно диаграмме скорости (фиг.З), где V - скорость электропривода t - время, величина пути замедления Н равна площади треуголь3ника Sncte определяется максималь ми значениями скорости и ускорения ,2 Напряжение (J на третьем входе блока замедления 7 пропорционально величине пути замедпения Н . Так как путь замедления для выбранных п раметров постоянный, -то с учетом ег значения устанавливается датчик импульса замедления на пути движения рабочего органа. При скорости электропривода V (фиг.З) путь замедления равен площади ограниченной кривой S (,(,( H 5a«bV Slcbc n l 1 где h - путь замедления с ускорени ем равным нулю; 2 - путь замедления с ускорени ем меньше НУЛЯ i,,5v,dt-, Ц, Г ( Sv Тогда lV,Jt илиН-Н, При этом условии выдается сигнал за замедление блоком 7 замедления. Напряжение, пропорциональное ti, формируется на выходе интегратора 17, а tij - на выходе усилителя 15. Поэтому и -U,.0 . При выполнении этого равенства срабатывает R-5-триггер 14, так как имеет характеристику и -1° Е L 14 где напряжение, определяемое источником питания. Рассмотрим работу устройства в первом режиме. При подаче сигнала Пуск от командного блока 1 на выходе задатчика 2 интенсивности формируется напряжение задания скорости, которое подается через сумматор 3 с характеристикой )-(} на блок 4 регулирования скорости электропривода, разгоняя его до скорости определяемой амплитудой сигнала на выходе командного устройства 1. При подходе рабочего органа электро привода к датчику импульса замелления (не показан) последний срабатывает и командньй блок 1 в точке -t 0 (фиг.З) со второго выхода вьщае1 сигнал и2 : 18 -(4 напряжение, определяемое источником питания. Этот сигнал подается на ключ 6, которьй замыкается и подключает сигнал датчика 5 скорости на вход 21 блока 7 замедления, и подается также на второй вход 10 блока 7 замедления и далее через инвертирующий усилитель 12 - на ключевой элемент 13, который размыкается и подготавливает интегратор 17 к работе. Напряжение от датчика 5 скорости подается на интегратор 17. Напряжение на выходе интегратора 17 равно Uf и К UjBlT и подается на сумматор 18, имеющий характеристику Ui и,1- Цт. Напряжение Uf подается также через квадратор 16 с характеристикой Ц (1/у)и через усилитель 15 с характеристикой Ufs- сумматор 19. Коэффициент передачи усилителя 15 определяется с учетом ограничиваемого значения ускорения С. () и для данного электроприПоэтомувода остается постоянным. ,2 ,.M ()Напряжение с выхода сумматора 19с характеристикой ( подается на R- S триггер 14. При работе интегратора 17 напряжение на выходе сумматора 18 уменьшается. Уменьшается при этом и напряжение на выходе сумматора 19. При ,-U-, триггер 14 переключается и на его выходе устанавливается напряжение Е , которое подается на командный блок 1 и клю- чевой элемент 20. Командный блок 1 снимает сигнал задания скорости с за датчика 2 интенсивности (фиг.З, момент ) и начинается то1)можение электропривода по линии Ь и с , а ключевой элемент 20 замыкается и подключает сигнал выхода сумматора 19 на вход сумматора 3. Момент начале торможения в. точке Ъ определяется автоматически блоком 7 замедпения с учетом расстояния до конечной точки
останова и скорости электропривода. При постоянной величине ускорения в режиме замедления линия t и с прямая и сигнал на выходе сумматора 19 раве нулю. В случае возмущения по Темпу .уменьшения скорости при торможении равенство tl нарушается, т.е. U,j5 О . Напряжение с выхода сумматора 19 в виде сигнала коррекции цодается на сумматор 3 и вызывает изменение скорости электропривода до момента, пока U-|j не станет равным нулю. Таким образом, стабилизируется также ускорение при торможении (приведенный на фиг.З график изменения скорости дан при ее начальном значении).
При работе устройства во втором режиме скорость электропривода равна максимальной, т.е. такой, для котброй рассчитан путь замедления Н .
Пуск и работа электропривода производятся по сигналу командного блока 1 аналогично рассмотренному выше При срабатывании датчика импульса замедления командный блок 1 выдает сигнал на переключение ключевых элементов 6 и 13. После замыкания ключа 6 сигнал датчика 5 скорости, пропорциональньй максимальной скорости Un)c(x подается через квадратор 16 (фиг.2), усилитель 15 на вход сумматора 19. Напряжение на выходе сумматора 19 становится равным ,нулю и,г-0,,-и,,-и,0
так как напряжение (т.е. при {,а выполняется равенство
vi
и. -5-триггер 14 пере п),
2С
ключается и выдает сигнал на командный блок 1, который снимает сигнал задания скорости с задатчика 2 интенсивности (фиг.З, t 0), и начинается торможение электропривода по линии dp, а также замьжается ключевой элемент 20.
В этом режиме момент начала замедления также осуществляется автоматическим блоком 7 замедления.
Размыкание ключевого элемента 13 и подача сигнала датчика 5 скорости приводит к работе интегратора 17, увеличение напряжения на выходе которого обеспечивает выполнение равенства и,а 0.
При этом напряжение U через замкнутый ключевой элемент 20 подается на сумматор 3, что (аналогично рассмотренному вьпяе) позволяет стабилизировать ускорение при торможении электропривода.
Таким образом, устройство обеспечивает минимальное время периода замедления формированием по оптималному закону диаграммы скорости при замедлении электропривода путем автоматического выбора момента начала замедления и осуществлении точной остановки электропривода, а также ограничение динамических нагрузок, исключение колебательных процессов за счет стабилизации ускорения замедления. Эти факторы позволяют повысит надежность и быстродействие системы электропривода.
в
Фиг.2
OQfe tSfoa c of f //s /
2
/r tff
г 02
V
Фиг. 5
| Чермалых В.М | |||
| и др | |||
| Система электропривода и автоматики рудничных стационарных машин и установок | |||
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
| Транспортер для перевозки товарных вагонов по трамвайным путям | 1919 |
|
SU105A1 |
| 0 |
|
SU347871A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
