-
15
&
Фиг1
Изобретение относится к области гидроавтоматики и может быть использовано в электрогидравлических системах станков, промышленных роботов, подъемно-транспортных машин и экскаваторов.
Целью изобретения является повышение быстродействия и точности.
На фиг.1 изображена схема электрогидравлического следящего привода; на фиг.2 - схема задатчика ускорения; на фиг.З - графики переходных процессов при отработке регулирующим органом насоса задающего сигнала.
Привод содержит последовательно соединенные источник задающего сигнала (не изображен), первый и второй сумматоры 1, 2, задатчик 3 скорости, сравнивающий усилитель 4. электрогидравлический усилитель 5 и гидродвигатели 6, 7 поворота регулирующего органа 8 насоса 9,соединенного гид ролиниями 10, 11 с исполнительным гидродвигателем 12, а также цепи обратной связи с датчиком 13 угла поворота органа 8, подключенным к отрицательному входу сумматора 1, и датчиком 14 скорости пово рота органа 8. соединенным с усилителем 4. К отрицательному входу сумматора 2 подключен блок выборки - хранения в виде амплитудного двухстороннего детектора 15, вход которого соединен с выходом сумматора 1, цепь сброса - с выходом нуль-сигнализатора 16, соединенного входом с выходом сумматора 1, Сумматор 2 выполнен с коэффициентом усиления по положительному входу в два раз большим, чем по отрицательному входу. Задатчик 3 выполнен в виде последовательно включенных операционного усилителя 17, охваченного цепью обратной связи с зоной нечувствительности в виде звена 18, и интегрирующего усилителя 19, кроме того, задатчик 3 включает резисторы 20-22.
Электрогидравлический следящий привод работает следующим образом.
Заданный сигнал Уз, пропорциональный заданному углу поворота уз органа 8
уз . (1)
где Ку - коэффициент пропорциональности и напряжения, выхода датчика 13. пропорциональный действительному значению угла поворота -у
Ui3 Ki3-y, (2)
где Ктз - коэффициент пропорциональности, причем «13 К у, поступают на положительный и отрицательный входы сумматора 1.
Коэффициенты усиления сумматора 1 по обоим входам одинаковы, поэтому напряжение на его выходе - Ui определяется
,-
-
10
15
20
25
30
35
40
45
50
55
уравнением
Ui Ki Ку (уз -y) Ki KyAyi, (3) где Ду уз - у - сигнал рассогласования по углу поворота регулирующего органа 8, т.е. напряженней пропорционально сигналу рассогласования Ду.
Двухсторонний амплитудный детектор 15 запоминает максимальную величину напряжения Ui Uimax, которая пропорциональна максимальному сигналу рассогласования в переходном процессе Ду Дутах ,
Амплитудный детектор 15 работает в одном из двух режимов: либо в режиме выборки, т.е. в режиме передачи на выход его входного напряжения,когда
, (4)
либо в режиме запоминания, когда амплитудный детектор запоминает напряжение
Uimax
U15 Uimax. (5)
где Uis - напряжение на выходе амплитудного двухстороннего детектора 15.
Амплитудный детектор 15 кроме входной и выходной цепи (вход и выход) имеет также цепь сброса. Он запоминает максимальное значение своего входного напряжения Uimax и сохраняет его до тех пор, пока не поступает сигнал в цепь сброса запомненного напряжения Uimax, после чего амплитудный детектор 15 переходит в режим выборки. Переход амплитудного детектора из режима выборки в режим запоминания происходит автоматически, в момент достижения напряжения Ui максимального значения Uimax.
Поскольку максимальное значение сигнала рассогласования имеет место в момент подачи задающего напряжения из, амплитудный детектор запоминает в этот момент напряжение
Ulmax KiKyp. (6)
Сумматор 2 имеет коэффициент усиления по положительному входу в два раза больший, чем по отрицательному входу. Поэтому напряжение на входе сумматора 2 определяется зависимостью
U2 K2(2Ui -U 15), (7)
где «2 - коэффициент усиления сумматора 2 по отрицательному входу.
С учетом зависимостей (3) и (6) уравнение (7) принимает вид
U2- K2Ki Ку(2Ду- у). (8)
На первом этапе переходного процесса напряжение на выходе сумматора 2 согласно уравнению (8) положительно, поскольку угол у мал. т.е Л у велико и имеет место неравенство:
2Ду уз (9)
Положительное напряжение U2 с выхода сумматора 2 поступает на вход задатчика 3. На выходе усилителя 17 устанавливается постоянное напряжение положительной полярности Ui7, значение которого определяется шириной зоны нечувствительности звена 18 в цепи обратной связи усилителя 17. Постоянное по величине положительное напряжение Ui7 поступает на вход интегрирующего усилителя 19, поэтому напряжением на его выходе Uig, которое является напряжением выхода задатчика 3, нарастает во времени по линейному закону.
10
где R2i - сопротивление резистора 21;
С - емкость конденсатора усилителя 19.
Напряжение Uig, поступающее на положительный вход усилителя 4, является сигналом задания скорости поворота органа 8 -уз т.е. заданная скорость двигателя на первом этапе переходного процесса нарастает во времени по линейному закону. Усилитель 4 охвачен сильной отрицательной обратной связью по скорости поворота - у. Сигнал этой обратной связи, поступающий с выхода датчика 14 на отрицательный вход усилителя 4, сравнивается с заданным значением скорости уз , т.е. усилитель 4 выполняет функцию регулятора скорости. Благодаря большому коэффициенту усиления этого усилителя и сильной отрицательной обратной связи по скорости обеспечивается отработка с высотой степенью точности заданного закона изменения скорости поворота регулирующего органа 8, формируемого задатчиком 3, т.е. действительная скорость у следит за заданной скоростью уз. Поэтому в любой момент времени переходного процесса имеет место практическое равенство этих двух скоростей
У ГЗ .(11)
Следовательно, на первом этапе переходного процесса отработки заданного угла поворота уз обеспечивается оптимальный процесс нарастания скорости у по линейному закону, определяемому равенством (10).
По мере увеличения угла у и приближения его к заданному значению уз напряжение на выходе сумматора 2 постепенно уменьшается. Напряжение Ui на входе интегрирующего усилителя 19 при этом не изменяется, т.е. закон изменения заданной скорости уз продолжает соответствовать уравнению (10).
Когда угол поворотиа у достигает поло- вины заданного значения уз , т.е. при у 0,5уз и соответственно Д у 0,5уз напряжение Ua по уравнению (8) становится равным нулю, а при у 0,5 уз оно изменяет свой знак, т.е. изменяется полярность напряжения на выходе усилителя 17 задатчика 3, после чего напряжение Dig на выходе интегрирующего усилителя 19 начнет уменьшаться во времени по линейному закону
5
0
5
0
5
0
5
0
5
U 19 -U 17 1
. (12)
R2iC
где U 19 - напряжение на выходе усилителя 19 в момент достижения равенства
у 0,5уз ;
t - время, отсчитываемое от момента достижения равенства ,5хз .
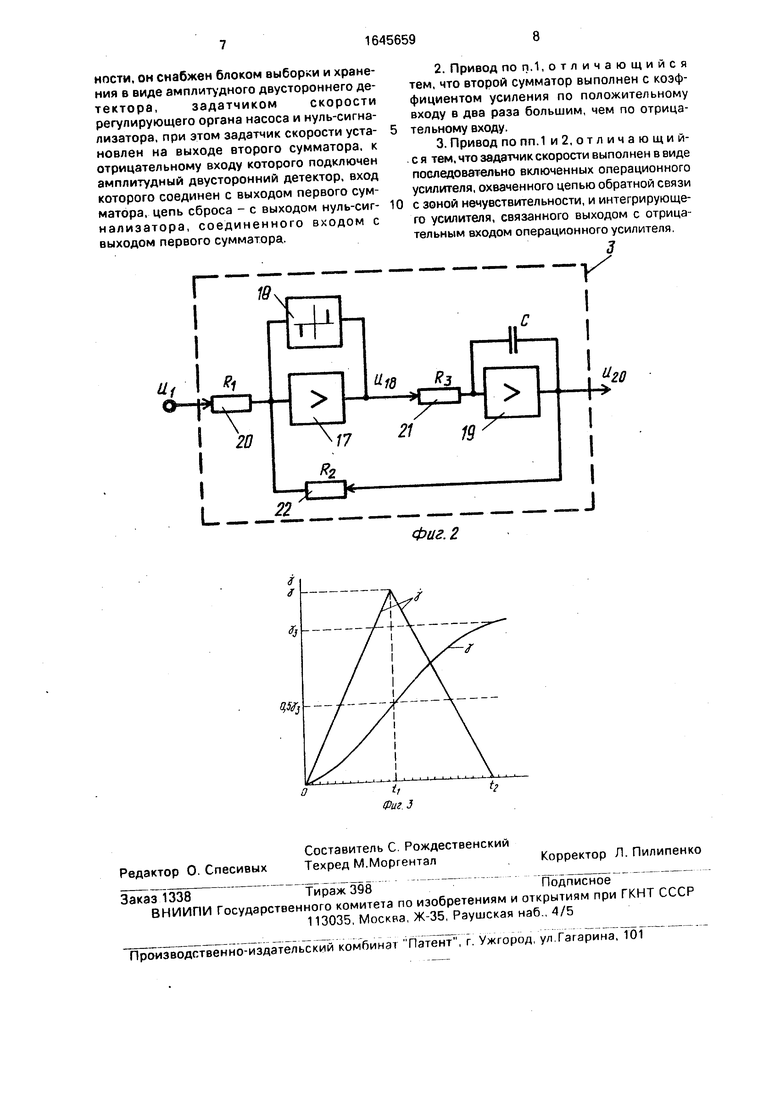
Начинается второй этап отработки заданного угла поворота регулирующего органа 8,в течение которого скорость снижается по линейному закону от максимальной величины, имеющей место при ,5уз , до нуля, а угол у увеличивается от значения у 0,5хз до заданного значения уз .Этому этапу соответствует на фиг.З интервал времени t - 12.
При достижении равенства у уз напряжение Ui на выходе сумматора 1 становится равным нулю и появляется напряжение, соответствующее логической единице на выходе нуль-сигнализатора 16. Это напряжение поступает в цепь сброса двухстороннего амплитудного детектора 15 и осуществляется сброс запомненного их ранее напряжения Lhmax, после чего амплитудный детектор 15 начинает работать в режиме выборки. При значении у уз заданная скорость поворота рабочего органа уз по уравнению (7) также равна нулю.
Формула изобретения
1. Электрогидравлический следящий привод, содержащий последовательно соединенные источник задающего сигнала, первый и второй сумматоры, сравнивающий усилитель, электрогидравлический усилитель и гидродвигатели поворота регулирующего органа насоса, соединенного гидролиниями с исполнительным гидродвигателем, а также цепи обратной связи с датчиком угла поворота регулирующего органа насоса, подключенным к отрицательному входу первого сумматором, и датчиком скорости поворота регулирующего органа насоса, соединенным со сравнивающим усилителем, отличающийся тем, что, с целью повышения быстродействия и точности, он снабжен блоком выборки и хранения в виде амплитудного двустороннего детектора, задатчиком скорости регулирующего органа насоса и нуль-сигнализатора, при этом задатчик скорости установлен на выходе второго сумматора, к отрицательному входу которого подключен амплитудный двусторонний детектор, вход которого соединен с выходом первого сумматора, цепь сброса - с выходом нуль-сигнализатора, соединенного входом с выходом первого сумматора.
2.Привод по п. 1,отличающийся тем, что второй сумматор выполнен с коэффициентом усиления по положительному входу в два раза большим, чем по отрицательному входу.
3.Привод по пп.1 и 2, отличающийся тем, что задатчик скорости выполнен в виде последовательно включенных операционного усилителя, охваченного цепью обратной связи с зоной нечувствительности, и интегрирующего усилителя, связанного выходом с отрицательным входом операционного усилителя.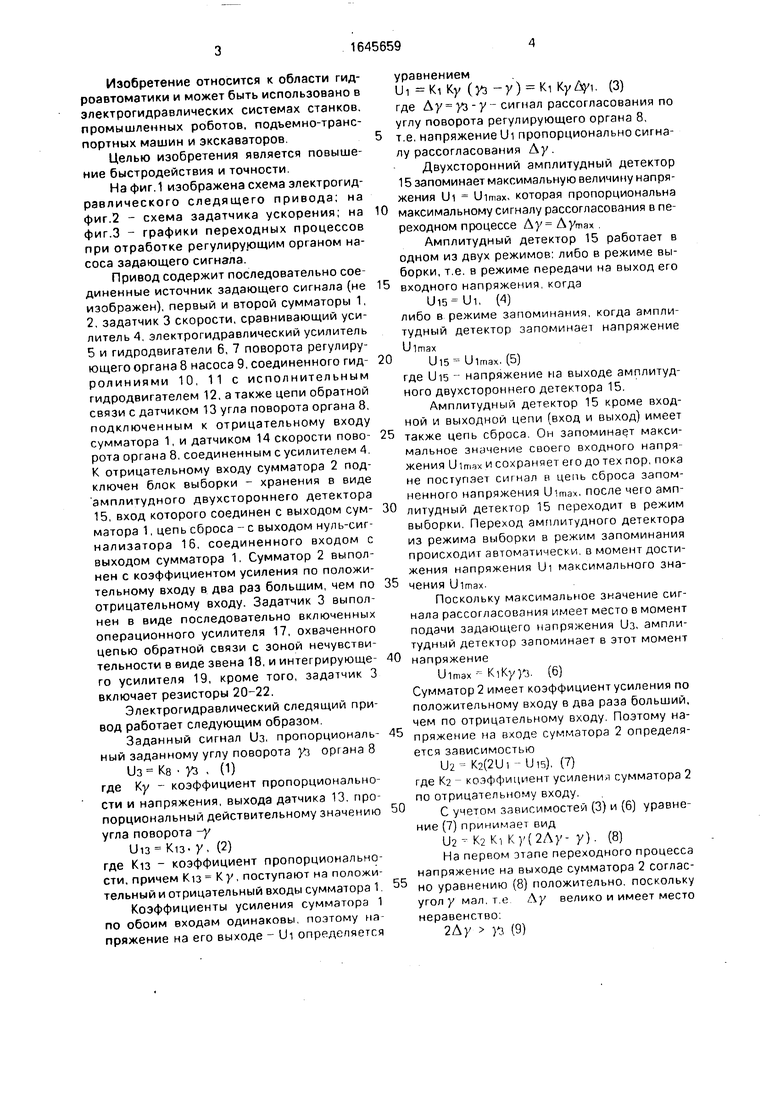

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1984 |
|
SU1179508A1 |
| Электронный регулятор расхода воздуха стенда для поверки и настройки шахтных сигнализаторов метана | 1985 |
|
SU1305404A1 |
| СПОСОБ УПРАВЛЕНИЯ ВИНТОВЫМ МЕХАНИЗМОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2013798C1 |
| Электропривод постоянного тока | 1983 |
|
SU1185517A2 |
| Регулятор загрузки рабочих органов уборочных сельскохозяйственных машин | 1983 |
|
SU1134132A1 |
| Электропривод постоянного тока | 1982 |
|
SU1072224A1 |
| ГИДРОПРИВОД ОБЪЕМНОГО РЕГУЛИРОВАНИЯ | 2010 |
|
RU2425257C1 |
| Система управления гидравлическимпРЕССОМ | 1979 |
|
SU821204A1 |
| Способ определения удельных потерь в образцах магнитомягких материалов | 1989 |
|
SU1691800A1 |
| Электрогидравлический следящий привод | 1987 |
|
SU1530823A1 |
Изобретение относится к гидроавтоматике и может быть использовано в электрогидравлических системах станков, промышленных роботов, подьемно-транс- портных машин и экскаваторов Целью изобретения является повышение быстродействия и точности. Задатчиком 3 формируется сигнал, пропорциональный И - -хтирф-ЦТ}заданному углу поворота, а датчиком 13 - сигнал, пропорциональный действительному значению угла поворота органа 8. Коэффициенты усиления сумматора 1 по обоим входам одинаковы, и напряжение на его выходе определяется сигналом рассогласования заданного и действительного положений органа 8. Амплитудный детектор 15 работает либо в режиме выборки, т.е передачи входного напряжения, либо запоминания, причем он запоминает и сохраняет максимальное значение входного напряжения, пока не поступит сигнал в его цепь сброса, после чего переходит в режим выборки, Сумматор 2 имеет коэффициент усиления, по положительному входу в два раза больший, чем по отрицательному. На первом этапе переходного процесса отработки рассогласования обеспечивается нарастание скорости по линейному закону, на втором этапе - уменьшение скорости по линейному закону. При достижении заданного угла поворота напряжение на выходе сумматора 1 равно нулю, а на выходе нуль - сигнализатора 16 - логический единице и детектором 15 осуществляется сброс заполненного напряжения. 2 з.п.ф-лы, 3 ил. Ё О ел с ел ю
и
Uf
1
20
IСИ1.
Фиг. 2
J
| Гидравлический привод объемного регулирования | 1982 |
|
SU1030588A1 |
