4 СО 05
Изобретение относится к области тягово- мропривода, в частности к устроист- м у равл ения электроприводами транс- пптных средств, и может быть использо- aSo в регулируемых электроприводахjipoленньи механизмов, электрической тяе Т.а железнодорожном и автомобильном
е/ш и зобретения --- повышение надеж на фиг. i представлена структурная схеа устройства для управления электроприводом транспортного средства; на фиг. 2 .- иаграмма изменения угла а регулирования в зависимости от соотношения частот авто- омГо источника переменного напряжения f и тягового электродвигателя f,, на Г„. 7 диаграмма зависимости выходно- о си нала узла сравнения от соотношения частот автономного источника переменного напряжения и тягового электродвигателя, на АиГ 4 - диаграмма зависимости тока ч pet обмотки тяшвого электродвигателя оГсоотношения частот автономного исто ника переменного напряжения и тягового
е7ой-оТправления электропривода-г и
напояжения N тиристорных преобразовате леГ 2 подсоединенных своими силовыми входами к выходу автономного источника 1 а ременного напряжения, /V тяговых электро двигателей 3, подсоединенных „х «ь.ходам i тиристорных преобразователей 2 W дат чиков 4 углового положения ротора, сочле ненных в алами с соответствуюп.ими валами /V тяговых электродвигателей 3, Л блоков 5 задания режима работы тяговых электро- авигаге тей N генераторов 6 импульс соединенных одними входами соответст вующими выходами блоков 5, Л
;--t;;;sr :r ™e s:L :rrs.o «r™ °ciss:; р- ГяГГв7;е гЛе; е5™
Спряжения, подсоединенный своим входом к выходу автономного источника 1 перемен ного н1пряжения. Л блоков 9 , соединенных одними их входов с выходом дат- чика 8 частоты, другими входами - с выходами датчиков 4 углового положения ротора и выходами - t другими входами гене- патооов 6 импульсов, тройство работает спедующим оора в блоке 9 сравнения сравнивается сигн-ал пропорциональный частоте автономч го источника 1 переменного напряжения,
по тупаюШиТс датчика 8 частоты перемен00 напряжения, и сигнал, пропорциональпй частоте тягового электродвигателя 3,
оступаютий с датчика 4 углового положе5
10 ,,
20
25
,
ния ротора. При этом зависимость выход- мла блока 9 сравнения от соотношения частот автономного источника 1 переменного напряжения и тягового электродвигателя 3 аналогична зависимости угла S регулирования от соотношения частот
выходной сигнал блока 9 сравнения поступает на вход генератора 6 импульсов в котором формируются импульсы, синхрони- зи о анные с напряжением автономного источника 1 переменного напряжения и сдви- Гтые относительно него по угол а регулирования пропорциональный ВЫХОДНОМУ сигналу блока 9 сравнения. На одни из входов генератора 6 импуль сов подаются выходные сигналы блока 5 задания режима работы (торможение, направление движения и т.п.).
Выходные сигналы генератора 6 импуль сов поступают на один из входов распрсде- литепя 7 импульсов, на другой вход которого гюступают сигналы с датчика 4 углового
положения ротора.ОП ПЫТРТЯ 7
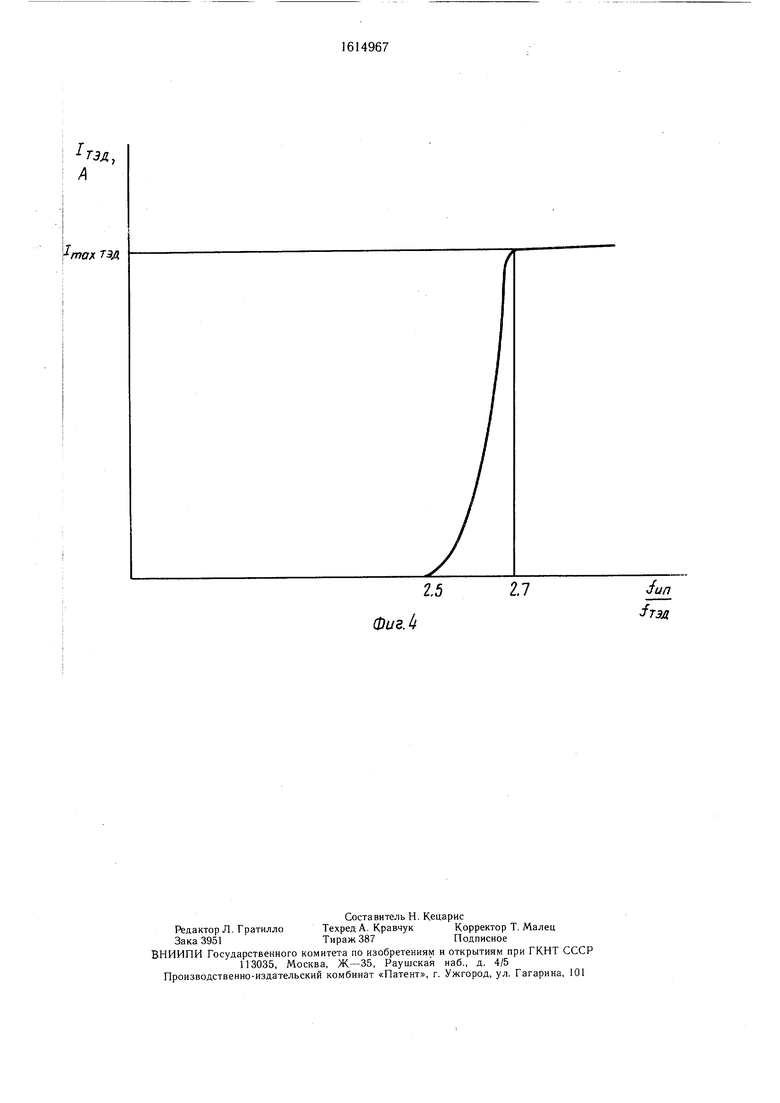
Выходные сигналы распределится / ИМПУЛЬСОВ поступают на вход тиристорного 5 прё бразовате„пя 2 с такой частотой и пос- едовательностью, чтобы тяговый электро- двигате.1Ь 3 совместно с тиристорным преобразователем 2 работал в режиме вентил., тока тягового электродви- гателя 3 от соотношения частот автоном- :;о источника 1 ременного напряжения и тягового электродвигателя 3 приведена на фиг. 4. Из диаграммы видно, что при достижении тяговым электродвигателем 3 пре- печьной частоты для заданной частоты ав- тоРоГого источника 1 переменного напря- женТя например при движении транспорт- шго средства под уклон, ток тягового электпопвигателя 3 уменьшается до нуля, тем ГГьшисключает ся возможность работь, при
40 соотношении частот менее 2, 5, т.е. обеспе чивается условие надежной коммутации силовых тиристоров во всем диапазоне частот тягового электродвигателя .
Б.ок 9 сравнения включает в себя пре- ,, образователь частота - напряжение дели- тель напряжений, источник опорного напряжения и сумматор.
В устройстве для управления электроприводом транспортного средства необходимое (безопасное) ссютношение частот 50 автономного источника переменного напря- жения и тягового электродвигателя осу- uS вляется Л независимыми контурами Каждый контур воздействует на угол а регулирования определенного тиристорного преобразователя, неисправность в од- 55 но™ ко птуре приводит к отключению только одного тягового электродвигателя
Быстродействие устройства определи ется только быстродействием электронных
устройств, входящих в его состав, и не ограничено инерционностью двигателя внутреннего сгорания и генератора.
Формула изобретения
Устройство для управления электроприводом транспортного средства, содержащее подключенные к выходу автономного источника переменного напряжения тиристорные преобразователи, к выходам которых под- ключены тяговые электродвигатели с датчиками углового положения ротора по числу тяговых двигателей, цепи из соединенных последовательно блока задания режима работы тягового электродвигателя, генератора импульсов и распределителя импульсов, к
0, zpffd эл.
выходу которого подключен управляющиГ; вход соответствующего тиристорного преобразователя, а также датчик частоты переменного напряжения, подключенный к выходу автономного источника и соединенный выходом с одним из входов одного блока сравнения, другой вход которого подключен к выходу одного из датчиков углового положения ротора, отличающееся тем, то, с целью повышения надежности, оно снабжено дополнительными блоками сравнения, каждый из которых подключен входами к выходам датчика частоты и соответствующего датчика положения ротора, причем выходы блоков сравнения соединены с управляющими входами соответствующих генераторов импульсов.

| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНЫЙ ТЯГОВЫЙ ЭЛЕКТРОПРИВОД | 1995 |
|
RU2093378C1 |
| Регулируемый электропривод | 1988 |
|
SU1629956A1 |
| Электрическая передача переменного тока автономного транспортного средства | 1985 |
|
SU1294655A1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД АВТОНОМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2692288C1 |
| Устройство для защиты тиристорного преобразователя частоты от перенапряжений и токов короткого замыкания | 1981 |
|
SU983887A1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД | 2015 |
|
RU2619925C1 |
| СПОСОБ ОПТИМАЛЬНОГО РЕГУЛИРОВАНИЯ ТЯГОВОГО ЭЛЕКТРОПРИВОДА АВТОНОМНОГО ТРАНСПОРТНОГО СРЕДСТВА С АСИНХРОННЫМИ ТЯГОВЫМИ ЭЛЕКТРОДВИГАТЕЛЯМИ | 2013 |
|
RU2547123C1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2297090C1 |
| ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД | 1998 |
|
RU2160495C2 |
| Многодвигательный электропривод | 1980 |
|
SU983961A1 |
Изобретение относится к тяговым электроприводам, в частности к устройствам управления электроприводами транспортных средств, и может быть использовано в регулируемых электроприводах промышленных механизмов, электрической тяге на железнодорожном и автомобильном транспорте. Цель изобретения - повышение надежности. Устройство для управления электроприводом транспортного средства содержит автономный источник 1 переменного напряжения, к выходу которого подключены датчик 8 частоты переменного напряжения и N тиристорных преобразователей 2, с выходами которых соединены соответственно N тяговых электродвигателей 3, сочлененных соответственно с N датчиками 4 углового положения роторов, N блоков 5 задания режимов работы, к которым подсоединены соответственно N генераторов 6 импульсов, с выходами которых соединены соответственно N распределителей 7 импульсов, N блоков 9 сравнения, подсоединенных своими входами к выходам датчика 8 частоты переменного напряжения и датчиков 4 углового положения роторов, а выходами - к другим входам генераторов 6 импульсов. 4 ил.
90
6/Л,
В
///
/7
ГЭД
JL
ип
/:
тэл
may. тэд
ип тэд
| King C.W., Collins G.C,, Slabiak W | |||
| Electric-wheel vehicle propulsion systemSAE Preprints, 1969, №71 p 17 |
