Фие.1
эуют гидронасос 2, снабженный регулирующим органом, который кинематически соединен с механизмом управления (МУ) 7. МУ 7, в свою очередь, электрически соединен через дополнительный усилитель 10 мощности, сумматор 9 и первый согласующий усилитель 8 с одним из выходов блока программного управления (БПУ) 6, другой выход которого через блок 11 деления.
усилитель 12 мощности соединен с гидроклапаном 5. Датчик 13 положения через второй 14 и третий 15 согласующие усилители соединен соответственно с вторыми входами блока 11 деления и сумматора 9. БПУ 6 позволяет разделить частотный диапазон изменения тормозного момента между гидроклапаном 5 и МУ 7 управления регулирующим органом гидронасоса 2. 3 ил.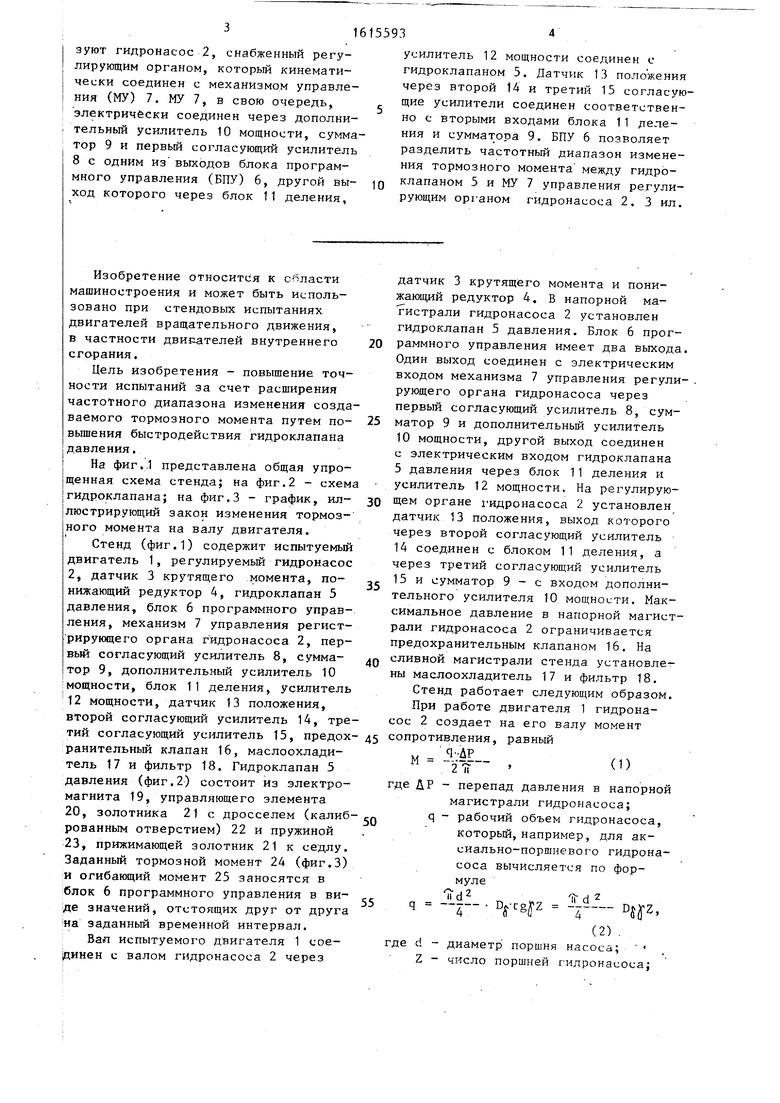
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ИСПЫТАНИЙ И ОБКАТКИ | 2004 |
|
RU2267761C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ИСПОЛНИТЕЛЬНОГО ОРГАНА ФРОНТАЛЬНОГО АГРЕГАТА | 2005 |
|
RU2282719C1 |
| Гидравлическая система управления погрузочно-транспортной машиной | 1982 |
|
SU1068318A1 |
| Система рулевого управления транспортного средства | 1989 |
|
SU1622213A1 |
| Позиционер | 1986 |
|
SU1388831A1 |
| НАСОСНАЯ СТАНЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 2000 |
|
RU2165528C1 |
| Гидропривод вращательного рабочего органа строительной машины | 2023 |
|
RU2834615C2 |
| Транспортное средство | 1985 |
|
SU1355506A1 |
| Устройство управления транспортным средством | 1989 |
|
SU1705143A1 |
| Транспортное средство | 1980 |
|
SU962039A1 |
Изобретение относится к машиностроению и служит для испытания двигателя вращательного движения и обеспечивает повышение точности испытаний за счет расширения частотного диапазона изменения создаваемого тормозного момента путем повышения быстродействия гидроклапана давления. В качестве тормозного устройства используют гидронасос 2, снабженный регулирующим органом, который кинематически соединен с механизмом управления (МУ) 7. МУ 7, в свою очередь, электрически соединен через дополнительный усилитель мощности 10, сумматор 9 и первый согласующий усилитель 8 с одним из выходов блока программного управления (БПУ) 6, другой выход которого через блок деления 11, усилитель мощности 12 соединен с гидроклапаном 5. Датчик положения 13 через второй 14 и третий согласующие усилители соединен соответственно со вторыми входами блока деления 11 и сумматора 9. БПУ 6 позволяет разделить частотный диапазон изменения тормозного момента между гидроклапаном 5 и МУ 7 управления регулирующим органом гидронасоса 2. 3 ил.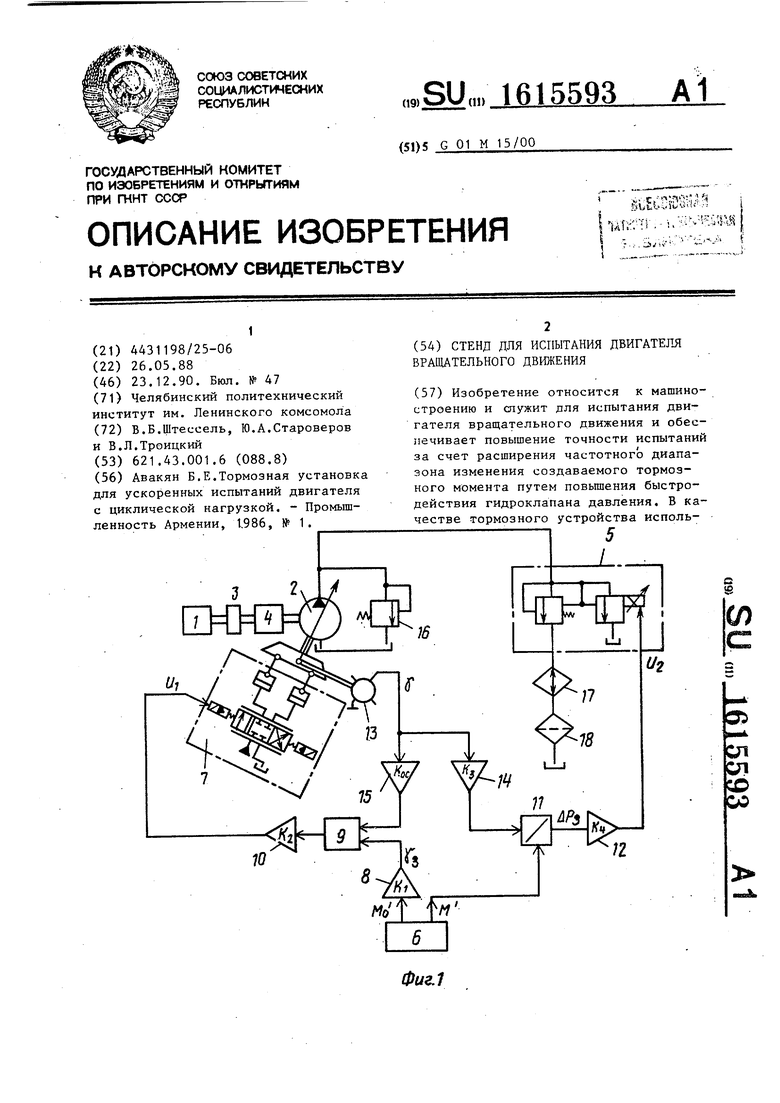
Изобретение относится к области машиностроения и может быть использовано при стендовых испытаниях двигателей вращательного движения, в частности двигателей внутреннего сгорания,
Цель изобретения - повышение точности испытаний за счет расширения частотного диапазона изменения создаваемого тормозного момента путем по- вьппения быстродействия гидроклапана давления.
I На фиг.,1 представлена общая упро- |щенная схема стенда; на фиг.2 - схем Iгидроклапана; на фиг.З - график, ил- :люстрируюп(ий закон изменения тормозного момента на валу двигателя.
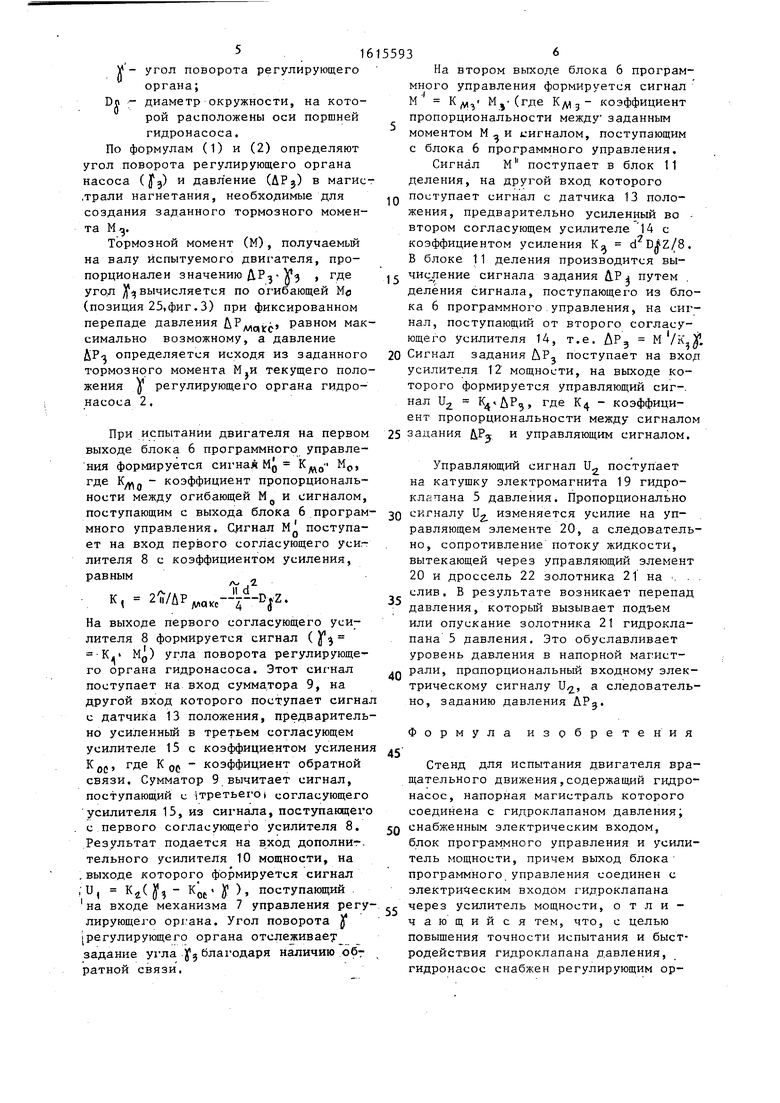
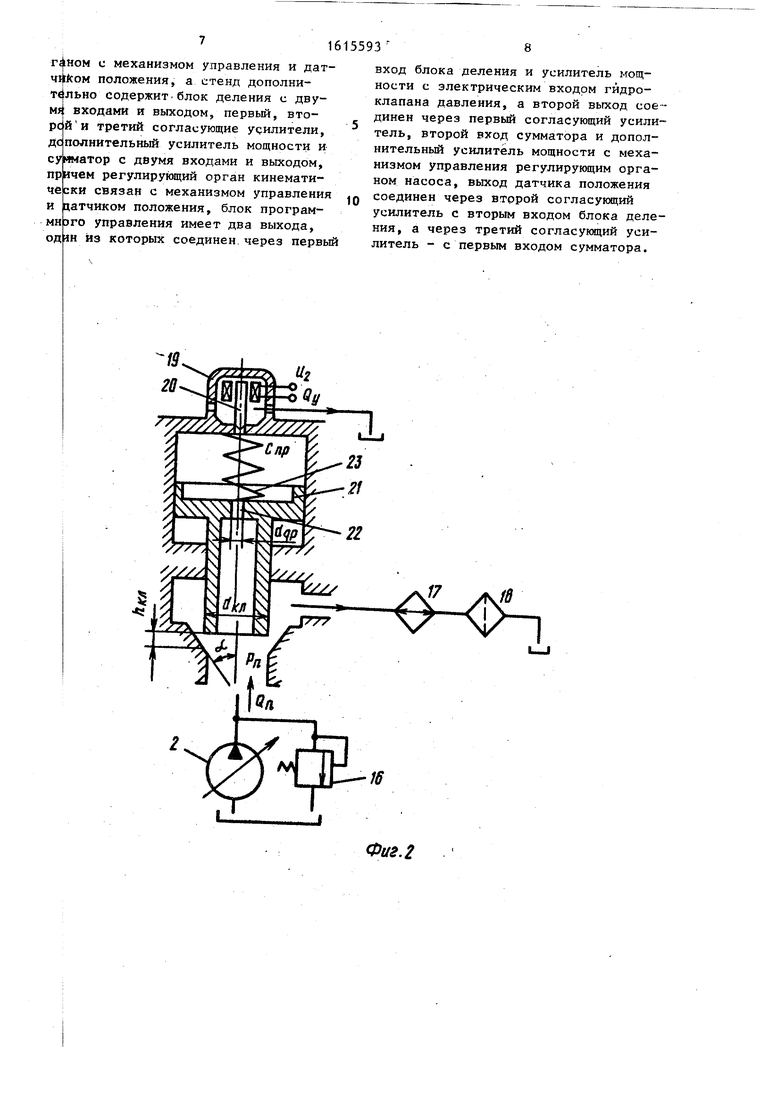
Стенд (фиг.1) содержит испытуемый двигатель 1, регулируемьй гидронасос 2, датчик 3 крутящего момента, понижающий редуктор 4, гидроклапан 5 давления, блок 6 программного управления, механизм 7 управления регистрирующего органа гидронасоса 2, первый согласующий усилитель 8, сумматор 9, дополнительный усилитель 10 МОЩНОСТИ, блок 11 деления, усилитель 12 мощности, датчик 13 положения, второй согласующий усилитель 14, третий согласующий усилитель 15, предохранительный клапан 16, маслоохладитель 17 и фильтр 18. Гидроклапан 5 давления (фиг.2) состоит из электромагнита 19, управляющего элемента 20, золотника 21 с дросселем (калиброванным отверстием) 22 и пружиной 23, прижимающей золотник 21 к седлу. Заданный тормозной момент 24 (фиг.З) и огибающий момент 25 заносятся в блок 6 программного управления в виде значений, отстоящих друг от друга на заданный временной интервал.
Вал испытуемого двигателя 1 соединен с валом гидронасоса 2 через
0
5
0
датчик 3 крутящего момента и понижающий редуктор 4. В напорной магистрали гидронасоса 2 установлен гидроклапан 5 давления. Блок 6 программного управления имеет два выхода, Один выход соединен с электрическим входом механизма 7 управления регулирующего органа гидронасоса через первый согласующий усилитель 8, сумматор 9 и дополнительный усилитель 10 мощности, другой выход соединен с электрическим входом гидроклапана 5 давления через блок 11 деления и усилитель 12 мощности. На регулирующем органе гидронасоса 2 установлен датчик 13 положения, выход которого через второй согласующий усилитель
14соединен с блоком 11 деления, а через третий согласующий усилитель
15и сумматор 9 - с входом дополнительного усилителя 10 мощности. Максимальное давление в напорной магистрали гидронасоса 2 ограничивается предохранительным клапаном 16. На сливной магистрали стенда установлены маслоохладитель 17 и фильтр 18.
Стенд работает следующим образом. При работе двигателя 1 гидронасос 2 создает на его валу момент 5 сопротивления, равный Ч-.ДР
5
0
м (1)
0
5
где ДР - перепад давления в напорной
магистрали гидронасоса; q - рабочий объем гидронасоса, который, например, для аксиально-поршневого гидронасоса вычисляется по формуле1ld2
q
где d - Z -Г-
ITd
(2)
диаметр поршня насоса; число поршней гидронасоса;
Dp
угол поворота регулирующего органа;
диаметр окружности, на которой расположены оси поршней гидронасоса.
По формулам (1) и (2) определяют угол поворота регулирующего органа насоса (jfj) и давл ение (APj) в магистрали нагнетания, необходимые для создания заданного тормозного момента М 3.
Тормозной момент (М), получаемый на валу испытуемого двигателя, пропорционален значению УЗ , где угол Jf вычисляется по огибающей MO (позиция 25,фиг.З) при фиксированном перепаде давления ДР
/иск ice
равном максимально возможному, а давление UP-1 определяется исходя из заданного тормозного момента MJИ текущего положения У регулирующего органа гидронасоса 2.
При испытании двигателя на первом выходе блока 6 программного управления формируется сигная MQ М,, где коэффициент пропорциональности между огибающей М и сигналом, поступающим с выхода блока 6 программного управления. Сигнал м поступает на вход первого согласующего усилителя 8 с коэффициентом усиления, равным
К, 2 ;г/др „,,-
На выходе первого согласующего усилителя 8 формируется сигнал (jf) -К. Мд) угла поворота регулирующего органа гидронасоса. Этот сигнал
л- .2
И d
DjZ.
поступает на вход сумматора 9, на другой вход которого поступает сигнал с датчика 13 положения, предварительно усиленный в третьем согласующем усилителе 15 с коэффициентом усиления К др, где К 05 - коэффициент обратной связи. Сумматор 9 вычитает сигнал, поступающий с 1третье1 О| согласующего усилителя 15, из сигнала, поступающег о с первого согласующего усилителя 8. Результат подается на вход дополни-, тельного усилителя 10 мощности, на ,выходе которого формируется сигнал ;и, , - KOJ. у ), поступающий
на входе механизма 7 управления регулирующего орг ана. Угол поворота У регулирующего органа отслеживаем задание угла jf благодаря наличию обг ратной связи.
На втором выходе блока 6 программного управления формируется сигнал М Кд, М Сгде Кд1д- коэффициент пропорциональности между заданным моментом М и сигналом, поступающим с блока 6 программного управления. Сигнал м поступает в блок 11 деления, на другой вход которого поступает сигнал с датчика 13 положения, предварительно усиленный во - втором согласующем усилителе 14с коэффициентом усиления К .JZ/8. В блоке 11 деления производится вычисление сигнала задания U.P j путем деления сигнала, поступающего из блока 6 программного управления, на си1- нал, поступающий от второго согласующего усилителя 14, т.е. Др, М /К, У.
Сигнал задания /,Р поступает на вход усилителя 12 мощности, на выходе которого формируется управляющий сиг-, нал и , где К4 - коэффициент пропорциональности между сигналом
задания Pj и управляющим сигналом.
с Q
Управляющий сигнал U поступает на катушку электромагнита 19 гидро- клачана 5 давления. Пропорционально сигналу и изменяется усилие на управляющем элементе 20, а следовательно, сопротивление потоку жидкости, вытекающей через управляющий элемент 20 и дроссель 22 золотника 21 на -. . . слив. В результате возникает перепад давления, который вызывает подъем или опускание золотника 21 гидроклапана 5 давления. Это обуславливает уровень давления в напорной магистрали, пропорциональный входному электрическому сигналу и, а следовательно, заданию давления APj.
Формула изобретения
Стенд для испытания двигателя вращательного движения,содержащий гидронасос, напорная магистраль которого соединена с гидроклапаном давления; снабженным электрическим входом, блок программного управления и усилитель мощности, причем выход блока программного управления соединен с электрическим входом гидроклапана через усилитель мощности, отличающийся тем, что, с целью повышения точности испытания и быстродействия гидроклапана давления, гидронасос снабжен регулирующим ор0
5
0
5
с механизмом управления и дат чиЛом положения, а стенд дополните л ьно содержит . блок деления с двувходами и выходом, первый, вто- рсй и третий согласующие усилители, дсполнительный усилитель мощности и суяматор с двумя входами и выходом, причем регулирующий орган кинематичеи
ски связан с механизмом управления датчиком положения, блок программного управления имеет два выхода, из которых соединен через первы
вход блока деления и усилитель мощности с электрическим входом гйдро- клапана давления, а второй выход соединен через первый согласующий усилитель, второй вход сумматора и дополнительный усилитель мощности с механизмом управления регулирующим органом насоса, выход датчика положения соединен через второй согласующий усилитель с вторым входом блока деления, а через третий согласующий усилитель - с первым входом сумматора.
Фиг. 2
Фиг.З
| Авакян Б.Е.Тормозная установка для ускоренных испытаний двигателя с циклической нагрузкой | |||
| - Промышленность Армении, 1.986, № 1 | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
