45 15 ft
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления движением транспортного средства с бортовым поворотом гидрообъемного типа | 1986 |
|
SU1341069A1 |
| Электрогидравлическая система усиления рулевого управления транспортного средства и способ управления электрогидравлической системой усиления рулевого управления транспортного средства | 2022 |
|
RU2792310C1 |
| ТРЕНАЖЕР МЕХАНИКА-ВОДИТЕЛЯ | 2023 |
|
RU2828735C1 |
| Устройство для обучения трактористов | 1977 |
|
SU678501A1 |
| АВТОМОБИЛЬНОЕ КРАНОВОЕ ШАССИ | 2018 |
|
RU2684838C1 |
| ГУСЕНИЧНЫЙ ТРАКТОР | 2008 |
|
RU2385249C1 |
| СТОЯНОЧНЫЙ ТОРМОЗ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2177889C2 |
| МАЛОГАБАРИТНЫЙ ЭЛЕКТРОПОГРУЗЧИК | 2012 |
|
RU2539442C2 |
| Гидрообъемный привод транспортного средства | 1987 |
|
SU1414665A1 |
| САМОХОДНАЯ МАШИНА С ОБЪЕМНОЙ ГИДРОПЕРЕДАЧЕЙ | 2002 |
|
RU2241609C2 |
Изобретение относится к транспортному машиностроению, в частности к устройствам управления движением транспортного средства с трансмиссией гидрообъемного типа. Цель изобретения - повышение надежности транспортного средства путем исключения случаев заглохания.двигателя. Устройство управления содержит кинематически связанные с движителями 2
25
1Z 2В 1 5 9 Ю 11
Фи г. г
#
-М
Г
(Л
С
vj О
ел
Ј
со
гидромоторы А, гидравлически соединённые с приводимыми от двигателя 13 гидронасосами 5 и 6, механизмы 7 и 8 регулирования рабочих объемов при помо- дитяг 9 и 10 связаны с рулевой колонкой 11. Датчики 14 и 15 контроля рабочих объемов гидронасосов 5 и 6 подключены через сумматоры 16, 17 и 20, умножители 10, 19 и 21 и усилительно-преобразовательный блок 22 к устройству 23 упрзпления частотой вращения двигателя и органу 24 изменения частоты сращения. Последний имеет нижний и верхний ограничители 25 и 26 предела изменения частоты вращения двигателя, первый из которых связан с блоком 27 стопорения рулевых тяг 9 и 10 и рычагом 45 стояночного тормоза, взаимодействующим с выключателем, включенным в цепь с датчиком 40 углоИзобретение относится к транспортному машиностроению, в частности к устройствам управления движением транспортных средств с бортовым поворотом.
Цель изобретения - повышение надежности транспортного средства путем исключения случаев заглохания двигателя.
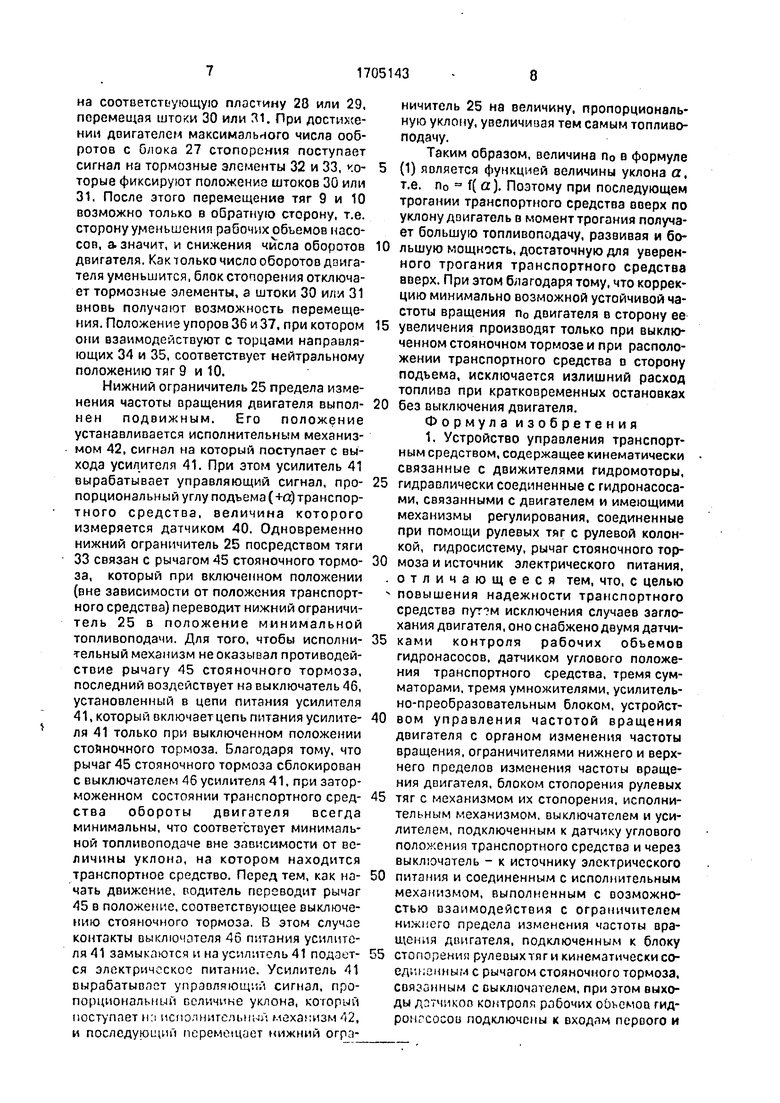
На фиг.1 приведен график зависимости изменения устойчивой частоты вращения двигателя от расположения транспортного средства на уклоне; на фиг.2 - принципиальная схема предложенного устройства управления; на фиг.З - механизм ограничения хода.
Устройство управления транспортным средством содержит движители 1 и 2 правого и левого бортов, кинематически соединенные с нерегулируемыми гидромоторами 3 и 4, которые гидравлически соединены с регулируемыми насосами 5 и 6. Последние снабжены механизмами 7 и 8 регулирования, которые кинематически связаны с тягами 9 и 10. Величина и направление перемещения тяг 9 и 10 изменяются посредством рулевой колонки 11. Регулируемые насосы приводятся во вращение от раздаточного редуктора 12, входной вал которого соединен с двигателем 13. Значения рабочих объемов насосов 5 и 6 контролируются датчиками 14 и 15, которые подключены к сумматорам 16 и 17. Выход сумматора 16 соединен с входом умножителя 18. Выход сумматора 17 соединен с входом умножителя 19. Выходы умножителей 18 и19 соединены с сходами сумматорл 20, выход которого связан с умножителем 2 , который подключен к усилительно- преобразовательному
вого положения транспортного средства, усилителем 41 и исполнительным механизмом 42. До момента начала движения транспортного средства и при выключенном рычаге 45 стояночного тормоза дополнительно производят автоматическую корректировку минимально возможной устойчивой частоты вращения двигателя в сторону ее увеличения пропорционально величине уклона, на котором находится в данный момент транспортное средство, причем указанную корректировку производят только при расположении транспортного средства в сторону подъема, а начало движения на подъем осуществляют при скорректированном значении минимально возможной устойчивой частоты вращения двигателя. 1 з,п. ф-лы, 3 ил.
блоку 22, который соединен с входом устройства 23 управления частотой вращения двигателя. Выход последнего связан с органом 24 изменения частоты вращения, имеющим нижний и верхний ограничители 25 и 26 предела изменения частоты вращения двигателя.
Нижний ограничитель 25 предела изме- нения частоты вращения двигателя соответствует минимально устойчивой частоте. Эта частота соответствует нейтральному положению механизмов 7 и 8 регулирования рабочих объемов, при котором значения рабочих объемов насосов равны нулю. Блок
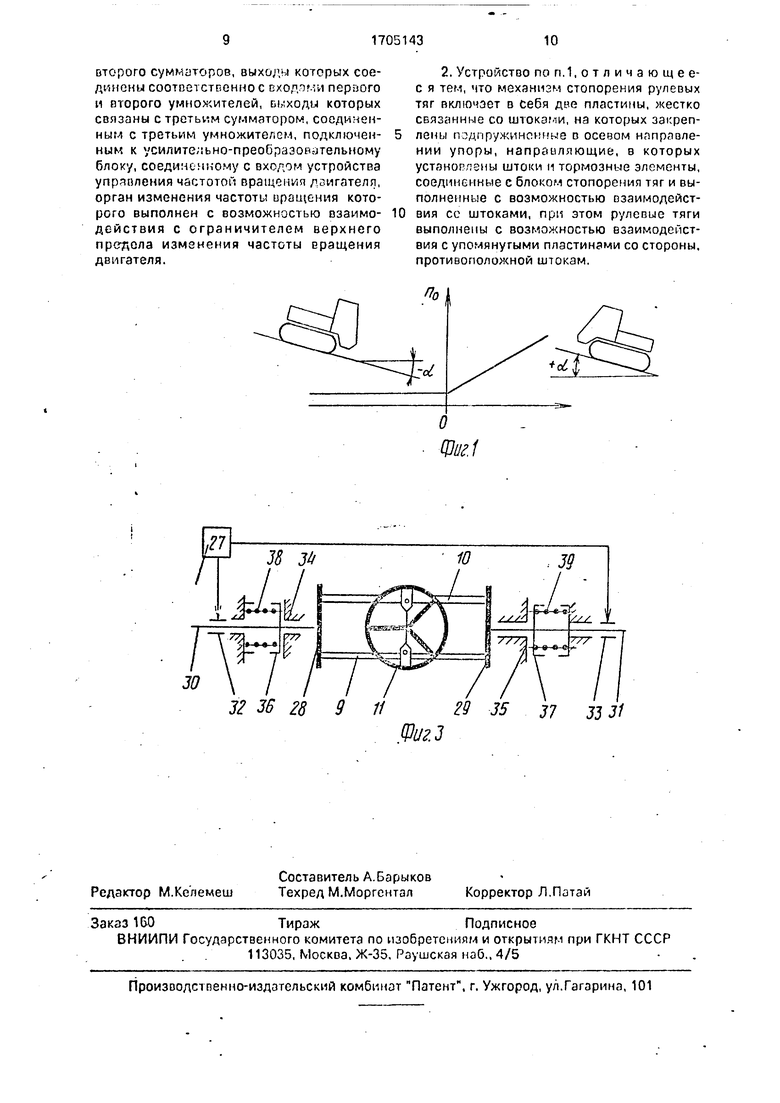
27 стопорения тяг 9 и 10 (фиг.З) имеет два выхода, соединенные с механизмами стопорения, выполненными в виде подвижных пластин 28 и 29, взаимодействующих с торцами тяг 9 и 10. Пластины снабжены штоками 30 и 31. При этом блок 27 стопорения выполнен так, что при его срабатывании невозможно перемещения тяг 9 и 10 в сторону увеличения рабочих объемов насосов 7 и 8, но возможно обратное их перемещение.
Для этого блок стопорения имеет тормозные элементы 32 и 33, воздействующие на штоки 30 и 31, каждый из которых размещен соответственно в направляющих 34 и 35 и снабжен жестко связанным с ним соответственно упорами 36 и 37, подпружиненными элементами 38, 39, которые поджимают штоки 30 и 31 с пластинами 28 и 29 к торцам тяг9 и 10.
Устройство управления содержит также
датчик 40 углового положения транспортного средства, выход которого соединен с входом усилителя 41, к выходу которого
подключен исполнительный механизм 42, воздействующий на упор 43, жестко связанный посредстоом тяги 44 с нижним ограничителем 25. Тяга 44 выполнена подвижной о осевом направлении и кинематически связана с рычагом 45 стояночного тормоза. В цепи питания усилителя 41 установлен выключатель 46.
Устройство управления работает следующим образом.
Управление движением и частотой вращения двигателя 13 осуществляется одновременно от одной рулевой колонки 11. При перемещении тяг 9 и 10 осуществляется изменение положения механизмов 7 и 8 регулирования и пропорциональное изменение рабочих обьемов насосов 5 и 6. Величина рабочих объемов насосов 6 и 5 контролируется с помощью датчиков 14 и 15, которые вырабатывают электрические сигналы, поступающие на сумматоры 15 и 17. В сумматоре 16 происходит сложение этих сигналов, а в сумматоре 17 - их вычитание. С выхода сумматора 16 абсолютная величина полученного значения сигнала поступает на вход умножителя 18, в котором умножается на 0,5. С выхода сумматора 17 сигнал, представляющий собой модуль разности текущих значений рабочих обьемов насосов, поступает на вход умножителя 19 с умножением на величину Кз/2, где Кз - безразмерный коэффициент, характеризующий увеличение сопротивления движению при маневрировании, в сравнении с сопротивлением, имеющим место при прямолинейном движении транспортного средства. Далее с выходов умножителей 18 и 19 сигналы поступают на входы сумматора 20, где происходит их сложение. С выхода сумматора 20 сигнал поступает на умножитель 21. где происходит умножение его на величину «2, характеризующую отношение приращения линейного перемещения Дх механизма регулирования рабочего объема к соответствующему ему приращению рабочего объема насоса Дц.т.е. «2 Ax/Aq. .
Текущее значение частоты вращения двигателя п определяется в соответствии с формулой
n no-fMKiK2 /qi q2/ +
+ K2/qi:q3/.
о)
где п0 - минимально возможная устойчивая частота вращения двигателя;
Птах - максимально допустимая частота вращения двигателя:
М - коэффициент масштабирования, характеризующий используемый механизм передачи перемещения от органов изменения рабочих объемов насосов к органу изменения частоты вращения двигателя;
Ki - коэффициент, характеризующий отношение приращения частоты вращения двигателя к соответствующему ему приращению положения органа управления частотой вращения двигателя, т.е.
.Ki
An У
Q1.Q2 - текущие значения рабочих объемов насосов.
Далее сигнал поступает на вход усилительно-преобразовательного блока 22 и на устройство 23 управления частотой вращения двигателя 13. Как только орган 24 изменения частоты вращения двигателя достигает верхнего ограничителя 26,соответствующего максимальной частоте вращения двигателя, сигна;: с датчика предельной частоты вращения (на фиг.2 не показан) вырабатывает сигнал на срабатывание блока 27 стопорения тяг 9 и 10, который управляет механизмами стопорения. При этом происходит торможение штоков 30 и 31. Последние имеют возможность перемещения вдоль направляющих 35 и 34 с некоторым затормаживанием, препятствующим свободному перемещению штоков 30 и 31 при движении транспортного средства на уклоне, т.е. при его ускорении. Штоки 30 и 31 жестко связаны с опорными пластинами 28 и 29, которые контактируют с торцами тяг 9 и 10. Таким образом, перемещаясь, тяги 9 и 10 воздействуют на одну из пластин 28 и 29
(в зависимости от направления перемещения) и перемещают ее. Как только частота вращения двигателя достигает максимального значения, сраба .ывает блок 27 стопорения тяг 9 и 10, и механизм стопорения
зафиксирует штоки 30 и 31. Дальнейшее перемещение тяг 9 и 10 в данном направлении становится невозможным. Таким образом, при достижении двигателем максимальных оборотов дальнейшее увеличение рабочих
объемов насосов 5 и 6 становится невозможным, т.е. невозможно дальнейшее увеличение потребной для движения мощности. В данном устройстве имеется возможность обратного хода тяг 9 и 10 в
сторону уменьшения скорости и крутизны маневрирования, что обеспечивается наличием механизма стопорения (фиг.З). который работает следующим образом.
При перемещении тяг 9,10 в ту или иную сторону они своими торцами воздействуют
на соответствующую пластину 28 или 29, перемещая штоки 30 или 31. При достижении двигателем максимального числа ооб- ротов с блока 27 стопорения поступает сигнал иа тормозные элементы 32 и 33, которые фиксируют положение штоков 30 или 31. После этого перемещение тяг 9 и 10 возможно только в обратную сторону, т.е. сторону уменьшения рабочих объемов насосов, а. значит, и снижения числа оборотов двигателя. Как только число оборотов двигателя уменьшится, блок стопорения отключает тормозные элементы, а штоки 30 или 31 вновь получают возможность перемещения. Положение упоров 36 и 37, при котором они взаимодействуют с торцами направляющих 34 и 35, соответствует нейтральному положению тяг 9 и 10.
Нижний ограничитель 25 предела изменения частоты вращения двигателя выполнен подвижным. Его положение устанавливается исполнительным механизмом 42, сигнал на который поступает с выхода усилителя 41. При этом усилитель 41 вырабатывает управляющий сигнал, пропорциональный углу подъема (+а) транспортного средства, величина которого измеряется датчиком 40. Одновременно нижний ограничитель 25 посредством тяги 33 связан с рычагом 45 стояночного тормоза, который при включенном положении (вне зависимости от положения транспортного средства) переводит нижний ограничи- тель 25 в положение минимальной топливоподачи. Для того, чтобы исполнительный механизм не оказывал противодействие рычагу 45 стояночного тормоза, последний воздействует на выключатель 46, установленный в цепи питания усилителя 41, который включает цепь питания усилителя 41 только при выключенном положении стояночного тормоза. Благодаря тому, что рычаг 45 стояночного тормоза сблокирован с выключателем 46 усилителя 41, при заторможенном состоянии транспортного средства обороты двигателя всегда минимальны, что соответствует минимальной топливоподаче вне зависимости от величины уклона, на котором находится транспортное средство. Перед тем, как начать движение, водитель переводит рычаг 45 в положение, соответствующее выключению стояночного тормоза. В этом случае контакты выключателя 46 питания усилителя 41 замыкаются и на усилитель 41 подается электрическое питание. Усилитель 41 вырабатывает управляющий сигнал, пропорциональный величине уклона, который поступает нп исполнительный механизм 42, и последующи перемещает нижний огра
ничитель 25 на величину, пропорциональную уклону, увеличивая тем самым топливо- подачу.
Таким образом, величина по в формуле
(1) является функцией величины уклона а, т.е. По f( а). Поэтому при последующем трогании транспортного средства вверх по уклону двигатель в момент трогания получает большую топливоподачу, развивая и большую мощность, достаточную для уверенного трогания транспортного средства вверх. При этом благодаря тому, что коррекцию минимально возможной устойчивой частоты вращения п0 двигателя в сторону ее
увеличения производят только при выключенном стояночном тормозе и при расположении транспортного средства о сторону подъема, исключается излишний расход топлива при кратковременных остановках
без выключения двигателя.
Формула изобретения 1. Устройство управления транспортным средством, содержащее кинематически связанные с движителями гидромоторы,
гидравлически соединенные с гидронасосами, связанными с двигателем и имеющими механизмы регулирования, соединенные при помощи рулевых тяг с рулевой колонкой, гидросистему, рычаг стояночного тормоза и источник электрического питания,
отличающееся тем, что, с целью
повышения надежности транспортного
средства исключения случаев заглохания двигателя, оно снабжено двумя датчиками контроля рабочих объемов гидронасосов, датчиком углового положения транспортного средства, тремя сумматорами, тремя умножителями, усилительно-преобразовательным блоком, устройством управления частотой вращения двигателя с органом изменения частоты вращения, ограничителями нижнего и верхнего пределов изменения частоты вращения двигателя, блоком стопорения рулевых
тяг с механизмом их стопорения, исполнительным механизмом, выключателем и усилителем, подключенным к датчику углового положения транспортного средства и через выключатель - к источнику электрического
питания и соединенным с исполнительным механизмом, выполненным с возможностью взаимодействия с ограничителем нижнего предела изменения частоты вращения двигателя, подключенным к блоку
стопорения рулевыхтяг и кинематически со- едикенным с рычагом стояночного тормоза, связанным с выключателем, при этом выходы датчиков контроля рабочих оЬъемоа гид- ронгсосоо подключены к входям первого и
второго сумматоров, выходы которых соединены соответственное входями первого и второго умножителей, выходы которых связаны с третьим сумматором, соединенным с третьим умножителем, подключенным к усилительно-преобразовательному блоку, соединенному с входом устройства управления частотой вращения дзигателл, орган изменения частоты вращения которого выполнен с возможностью взаимодействия с ограничителем верхнего предела изменения частоты вращения двигателя.
/
32 36 28 9 11Z9 35 37 33 3
teJ
0
| Устройство управления гидравлической трансмиссией транспортного средства с бортовым поворотом | 1986 |
|
SU1341068A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
