Изобретение относится к с:йтомати ке и может быть применено при фотО записи на программоносителе цифрово го кода, графических изображений, масок печатных плат, синхроструктур типа растровых градаций и.т;д,, преимущественно в случайх, где необходимая точностная угловая привязка места экспонирования соответствует размеру порядка 1 мкм.
Цель изобретения повышение точ нести регулятора.
Регулятор обеспечивает изменение частоты вращения программоносителя и соответственно скорости перемещения экспонирующего светового пятна обратно пропорционально текущему радиальному положению светового пят на с обеспечением постоянства скорости записи (воспроизведения),
Регулятор обеспечивает работу электропривода так, что вектор скорости записи постоянен: Vj const, что.необходимо для обеспечения постоянства экспонирования. Составляющие этого вектора Vo - реализуются радиальным перемещением записывающего лазера,
Vn - нормальная к.радиусу составляющая - реализуется работой регулятора.
Дискриминатор системы
Vp(t) COp(t) rp(t).
г
где Vp(t) - реальная (текущая) линейная скорость; Гр(t) - радиус записи, Vp(t) сравнивается с заданной линейной скоростью V(t) . Система стабилизации этой CKOpocTHVa(t)связана с цифровой информацией о радиальном положении записывающего лазера,
В процессе работы осуществляется отработка возникающих рассогласований между заданной скоростью вращения и реальной скоростью вращения программоносителя методом мультиплексирования (последовательного выбора) частотных импульсных последовательностей, вырабатываемых в структуре регулятора. При рассогласовании имеет место коммутация импульсных последовательностей с возрастанием (убыванием) частоты, причем такая коммутация осуществляется в Т-периоде измеренного рассогласования, а направление выбора (возраста1ше или
10
15
20
15673. -I
убывание частоты) определено знаком рассогласования,
В следующий период измерение рассогласования будет другим - коммутируются соответствующие импульс ные последовательности. Если же рассогласование равно нулю на выход регулятора поступает номинальная, им- пульсно-частотная последовательность.
Это определяет эффект трехпози- ционного регулирования привода программоносителя и отличает предложен- ньй регулятор от прототипа по точности позиционирования. Дополнительный эффект повьщ1ения точности позиционирования такого частотного регулирования состоит в том, что менее сказываются тяжения от эксцентричного положения роуора, связанного с по грещностями его конструктивного исполнения,
В результате того, что опорная частота генератора может превышать 25 на порядок частоту импульсной после- . довательности, формируемой фотопреобразователем, Т-период измерения может соответствовать внутридискрет- ному значению погрещности периода ., прохождения смежных прозрачных окон
лимба. Этот период определяется ста- тистически за счет осреднения.
Таким образом, измерительное устройство будет фиксировать рассогласование в пределах дискрета штриховой дорожки модулирующего лимба.
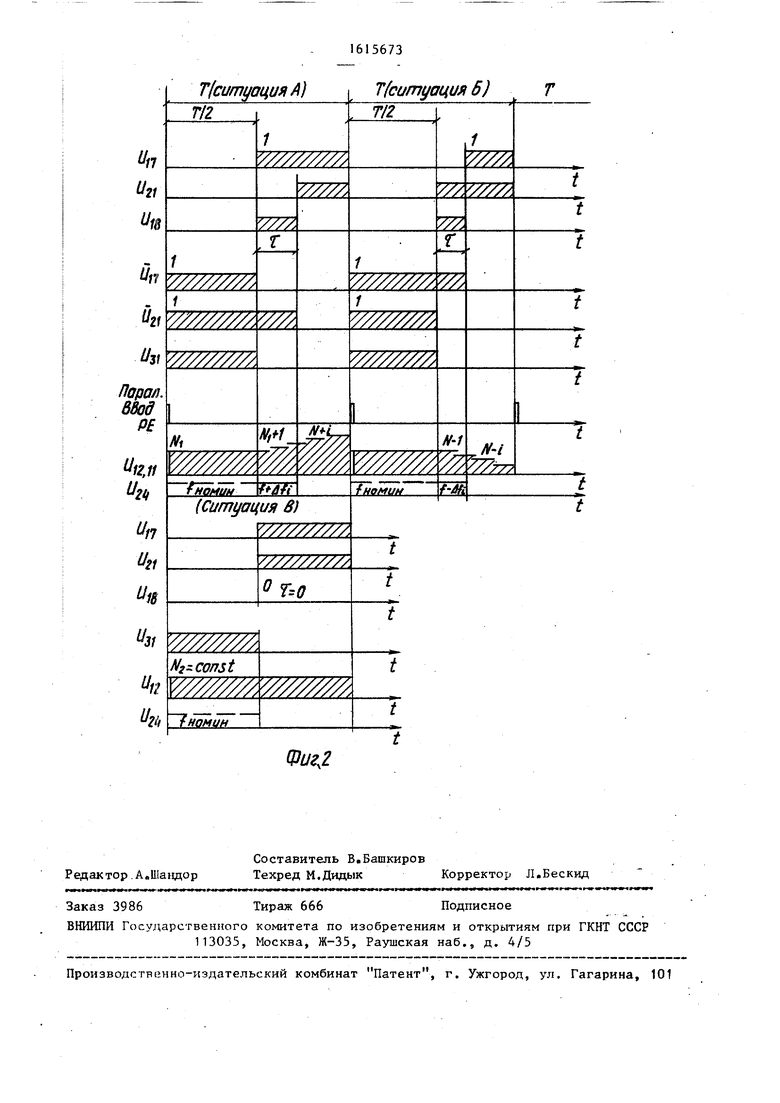
Путь сигнала к исполнительному органу укорочен, так как на входах последнего мультиплексора уже при- 40 сутствует нужная частотная последовательность и это определяет дополнительную составляющую повышения точности углового позиционирования в момент импульса фотозаписи, 45 На фиг,1 представлена функциональная схема регулятора скорости вращения программоносителя устройства фотозаписи; на фиг,2 - эпюры сигналов на выходах элементов устройства.
Регулятор скорости вращения программоносителя устройства фотозаписи содержит первый делитель 1 частоты, первый счетчик 2, генератор 3 импульсов, вычитающий 4 и суммирующий 5 счетчики, второй делитель 6 частоты, регистр 7 памяти,.первый мультиплексор 8, первый RS-триггер 9, элемент ИСКЛЮЧАЩЕЕ ИЛИ 10, второй счет35
50
55
5
чик li, второй мультиплексор 12, второй ЕЗ-триггер 13, третий 14,чет вертьй 15 и пятый 16 мультиплексоры первый 17, второй 18 и третий 19 элементы И,
Регулятор скорости вращения граммоносителя устройства фотозапи си работает следующим образом.
После переходного процесса кручивания аэростатического шпинде - ля электроприводом достигается заданная скорость записи. Записывающий лазер перемещается с радиальной скоростью Vp системой радиального позиционирования, формирующей числовое значение координаты, записываемой в регистре 7 (фиг,1). Эта координата записывается в счетчиках 4 и 5 в моменты тактирования входа разрешения параллельного переноса импульсами делителя:6, Этими же импульсами осуществляется установка RS-триггеров 9 и 13 и обнуление счетчиков 2 и 11. В периодах между упомянутыми импульсами осуществляется операция сравнения истиной скорости вращения шпинделя, которая сформирована по каналу обратной связи фотопреобразованием модулированного светового потока источника в виде частотной импульсной последовательности с частотной импульсной последовательностью генератора :3, Импульсами генератора заполняется счетчик 2, причем счетчики 2 и 11 . в случае одинаковой скорости.тактирования обеспечивают одинаковую скорость коммутации сигнальных щин мультиплексоров 8 и 12, Одноименные сигнальные шины выходов этих мультиплексоров в этом случае возбуждаются, одновременно вызывая одновременное срабатывание RS-триггеров 9, 13, Обеспечивается коммутация номинальной частотной последовательности на выходе мультиплексора 16, Если же условие одинаковой коммутации нарушается, срабатывает соответствующий RS-тригг.ер (диаграммы И 17, И 21, фиг,2), что вызывает срабатывание элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 10 (диаграмма И 18) в 1, -периоде. Длительность t-периода характеризуют величину рассогласования, а первоначально сработавший RS-триггер обеспечивает соответствующую отработку по. знаку рассогласования.
56736
Таким образом осуществляется срав нение сигнала записи и сигнала, ото бражающего реальную угловую скорость .программоносителя CL) var.
Угловая скорость программоносителя формируется по закону
где k - коэффициент пропорциональности;
р- текущий радиус записи. Генератор 3 обеспечивает измене- ни частоты импульсов в соответствии с кодом регистра 7 в диапазоне
где f цц - частота начального радиуса
записи;
f rij, - частота конечного радиуса
записи.
Делитель 1 формирует частотные и меняющие скважность импульсные последовательности f , .. . ,f ,., коммутирующие входы мультиплексоров 14 и 15,
Мультиплексоры 8, 12, 14, 15 и 16 управляются кодом числа, записанного
в соответствзпощем счетчике. Это обеспечивает передачу частотной последовательности через мультиплексор по подключавшейся к его выходу сигнальной шине,
Пусть на (n,...,nj) сигнальных шинах мультиплексоров 14 и 15 сутствуют изменяющиеся частотные последовательности, фО} мируемые гене- ; ратором;3. Этот генератор синхрони-
зирован начальным штрихом лимба и
формирует частотные импульсные по- следовательности, изменяющиеся при изменении текущего радиуса записи. Они коммутируют входы делителей 1 и
6, а на выходных шинах делителя 1, подсоединенных к сигнальным входным шинам мультиплексоров 14 и 15 - преобразованные частотно и по скважности импульсные последовательности, С
учетом диапазона изменений частот последовательностей генератора 3 перекрывается весь диапазон текущих радиусов записи. Обеспечивается указанное условие в основе которого -
постоянство ЭКСПО11ИрОванИЯ при СОудц- .
вариациях угловой скорости вращения программоносителя.
На сигнальных входах мультиплек- соров 14 и 15 присутствуют частотные
последовательности f
- р . о. ,f j;. изме шлющиеся за счет работы генератора Е периоде работы. Сигнальные шины указанных мультиплексоров коммути руются по двум составляющим: одна (Доставляющая - это результат текуще г|о кода радиальной позиции, записы ваемого в счетчики 4 и 5 с той осо бенностью, что входы управления мультиплексорами подключены к шям разрядам счетчиков, а вторая со сгавляющая - динамическая, связана отработкой рассогласования флюктуа Цг1й частоты вращения при тактирован счетчиков 5 и 4 в свойственных им р ежимах работы суммирования на одно и вычитания,на другом. Это обеспечивает при рассогласовании коммутацию смежной сигнапьной шины мультиплек с 5ров 15 и 14 на выход с одновремел HI.IM разрешением прохода соответст- втющей частотной последовательности ч грез мультиплексор 16,
I Рассмотрим загрузку счетчиков 5 ,
Из регистра 7, в который записывается информация с датчика радиаль ной координаты, представляющего со бой, например,, интерференционный П)еобразователь с формированием циф роЕОго кода т(вкущего радиуса, на Dj-входы параллельного переноса пО с- упает код числа, соответствующий т кущему радиусу рабочей точки син Х1 одискав При импульсе разрешения на информационном входе счетчика, посту пфощем по кансшу синхронизации через дфлитель 6, в счетчиках записывает CJJC число Np, где р - индекс текущего р4циуса. I
Если возмущения отсутствуют, счет чйки не изменяют состояния при так тйровании тактовых входов, Информа - цИя, поступающая по информационным входам паралл 1льного ввода, обеспечивает по старшим разрядам коммута- щйо соответстнующей информационной мультиплексоров 14 и 15 на вы- хфд.
Имеет место алгоритм: депитф1Ь 6 фс рмирует синхросигнал, которым оп- р« делены периоды сброса элементов 8- 1Д и определен дискретный ввод чис- информации от датчика радиаль- координаты. Коды счетчиков 5 и 4 коммутируют входы управления мульти- njleKCOpOB, что определяет подключе- Hi-te соответствующей информационной
8
0
0
5
5
0
5
0
5
0
5
шины, что определяет номинальную СО,, из Си уд на текущем радиусе при обеспе- чении постоянства экспонирования.
При флюктуации частоты вращения, которую фиксируют элементы 8-13, импульсы разрешения поступают на сигнальные входы счетчиков, например, счетчика:5, Импульсная последовательность с выхода мультиплексора 14 с подключенной шиной номинального кода увеличит содержимое счетчика и изменит код на входах управления мультиплексора 15, обеспечивая подключение .-шины, где i - индекс номинального кода. Импульсная последовательность f, с выхода делителя I пройдет через мультиплексор 16 и обеспечит отработку рассогласования (+ IVU)) о
Если измерительное устройство зафиксировало флюктуацию противоположного знака, импульс разрешения тактирования поступит на RC-вход счетчика 4, который уменьшит свое содержимое и сформирует соответствую1ций код на Sj-входах мультиплексора 14, обеспечивая коммутацию смежной ,- шины аналогично ранее рассмотренному.
Частотная последовател ьность f через мультиплексор 16 сформируется на выходе регулятора, обеспечивая отработку рассогласования противоположного знака,
В системе обеспечивается динамическое мультиплексирование с обеспечением точности ОЗудрНе хуже 0,02%,
Интенсивность отработки рассогласований изменяется в зависимости от длительности периода рассогласования, а признак возрастания (убывания) частоты импульсной последовательности связан со знаком рассогласования.
Достигаемое постоянство экспонирования на переменном радиусе делает ненужным нелинейное регулирование мощности лазера, что дополнительно повышает качество фотозаписи при эффекте повышения позиционной угловой точности площадки экспонирования.
Формула изобретения
Регулятор скорости вращения программоносителя устройства фотозаписи, содержащий генератор импульсов, i первьй счетчик, два элемента И, пер вый делитель ча :тоты, суммирующий и вычитающий счетчики, регистр памяти.
второй счетчик, подключенный входом сброса к входам установки в нулевое состояние первого и второго Е8 триг « геров, подключенных входами установ - ки в единичное состояние к выходам соответственно первого и второго мультиплексоров, управляющий вход второго мультиплексора соединен с выходом второго счетчика, о т л и - чающийся тем, что, с целью повышения точности регулятора, введены второй делитель частоты, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ и три мультиплексора первый информационный вход регулято- ра подключен к тактовому входу вто рого счетчика, подсоединенного вхо дом сброса к входу сброса сумматора, к входам управления .параллельным вводом суммирующего и вычитающего счетчиков и к выходу второго делителя частоты, вход которого подключен к входу первого делителя частоты, вы ходу генератора импульсов и тактовому входу первого счетчика, соединен- ного выходом с управляющим входом первого мультиплекссчра, информационные входы первого и второго мультиплексоров подключены к шине высокого логического уровня, прямой выход пер- вого RS-триггера соединен с первыми входами элемента ИСКЛЮЧАЮЩЕЕ ИЛИ и первого элемента И, подключенного вторым входом к выходу элемента ИСКПКЬ. ЧАЮЩЕЕ ИЛИ и первому входу второго элемента И, второй вход которого соединен с вторым входом элемента ИСКгаОЧАИЦЕЕ ИЛИ и прямым выходом второго RS-триггера, инверсные выходы первого и второго RS-триггерОБ подключены соответственно к первому и второму входам третьего элемента И, выход первого делителя частоты соединен с информационными входами третьего и четвертого мультиплексоров, подключенных управляющими входами к выходам соответственно вычитающего и суммирующего счетчиков, а выходами - к тактовым входам соответственно суммирукицего и вычитающего счетчиков подсоединенных информационными входами к вькоду регистра памяти, вход которого является вторым информационным входом регулятора, входы управления тактированием суммирующего и вычитающего счетчиков подключены к прямым входам соответственно первого и второго RS-триггеров, выходы третьего и четвертого мультиплексоров соединеш 1 с информационными входами пятого мультиплексора, управляющие входы которого подключены к выходам элементов И, а выход является выходом регулятора.
Ul7
иг,
3f
Порал. ввод Р
/г// U2
и„ и,,
%
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система для воспроизведения фотозаписи | 1985 |
|
SU1317397A1 |
| Устройство для управления регулятором переменного напряжения со звеном повышенной частоты | 1985 |
|
SU1347112A1 |
| Преобразователь частота-код | 1987 |
|
SU1427571A2 |
| Устройство для стабилизации вакуума | 1983 |
|
SU1149060A1 |
| Устройство для автоматической фокусировки излучения на носителе в системе записи-воспроизведения информации | 1989 |
|
SU1705861A1 |
| Цифровой управляемый генератор | 1986 |
|
SU1378022A1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2310971C1 |
| Цифровой следящий электропривод | 1985 |
|
SU1308982A1 |
| Устройство для управления многоканальным электроприводом тренажера | 1984 |
|
SU1180846A1 |
| Цифровое устройство для коммутации симистора | 1982 |
|
SU1039005A1 |
Изобретение относится к автоматике и может быть применено при фотозаписи на программоносителе цифрового кода, графических изображений, масок печатных плат, синхроструктур типа растровых градаций и т.д. преимущественно в случаях, где необходимая точностная угловая привязка места экспонирования соответствует размеру порядка 1 мкм. Цель изобретения - повышение точности регулятора. Регулятор скорости вращения программоносителя устройства фотозаписи содержит первый делитель частоты 1, первый счетчик 2, генератор 3 импульсов, вычитающий счетчик 4, суммирующий счетчик 5, второй делитель частоты 6, регистр 7 памяти, первый мультиплексор 8, первый RS-триггер 9, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 10, второй счетчик 11, второй мультиплексор 13, второй RS-триггер 13, третий 14, четвертый 15 и пятый 16 мультиплексоры, первый 17, второй 18 и третий 19 элементы И. Цель изобретения достигается за счет введения элементов 6, 10, 14 - 16. 2 ил.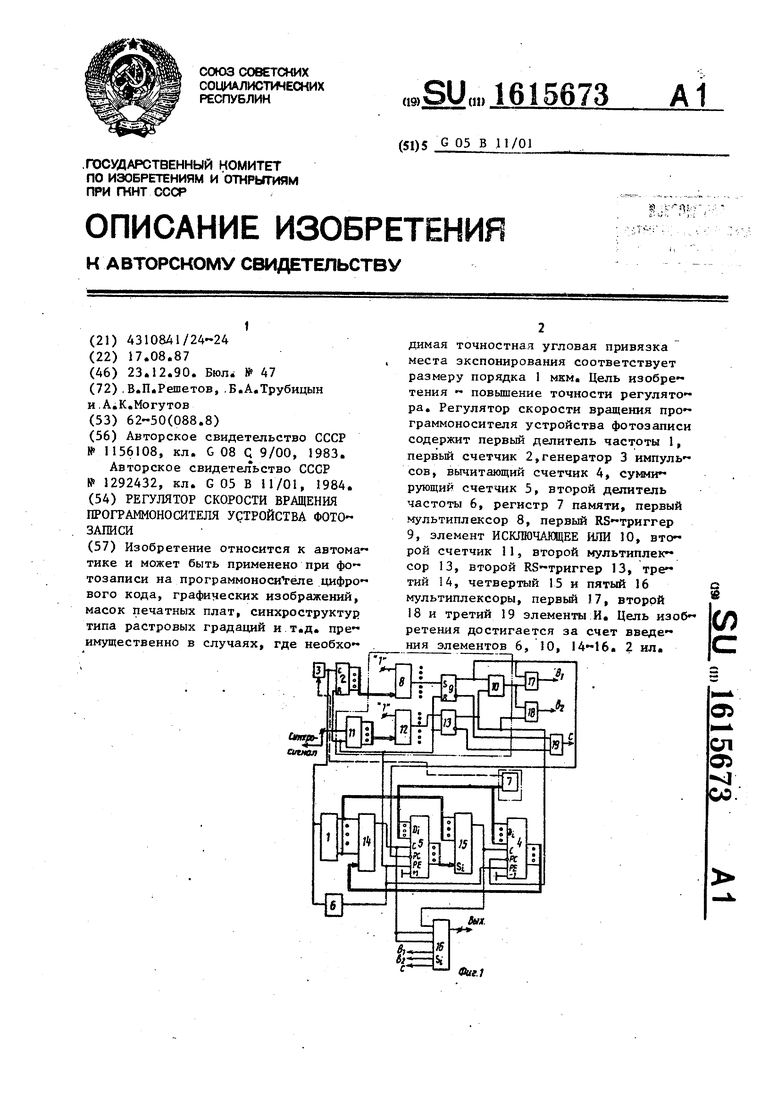
% f-
Фиг,2
| Способ записи информации на синхродиски и устройство для его осуществления | 1983 |
|
SU1156108A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Авторское свидетельство СССР № 1292432, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
