i
Г f лг
8
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулируемый электропривод | 1988 |
|
SU1629956A1 |
| Частотно-управляемый электропривод | 1986 |
|
SU1372577A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2382334C1 |
| СПОСОБ СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2385530C1 |
| Асинхронный частотно-регулируемый электропривод | 1985 |
|
SU1277347A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ГИРОСТАБИЛИЗАТОРОМ | 2008 |
|
RU2381451C1 |
| Асинхронный электропривод | 1989 |
|
SU1753576A1 |
| СПОСОБ СТАБИЛИЗАЦИИ СКОРОСТИ ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2385531C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ СКОРОСТИ ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2383863C1 |
| Устройство для измерения скорости вращения асинхронного двигателя с фазным ротором | 1981 |
|
SU1010564A1 |
Изобретение касается измерений и контроля параметров движения и может быть использовано для измерения угловой скорости асинхронных двигателей, в частности двухскоростных асинхронных двигателей с короткозамкнутым ротором и двумя незави1 симыми статорными обмотками. Целью изобретения является повышение надежности и точности измерения. Устройство для измерения скорости асинхронного двигателя 1 содержит блок 2 выделения сигнала и блок 3 измерения, подключенный к выходу блока выделения. Устройство снабжено блоком 4 силовых коммутирующих элементов и блоком 5 управления, причем блок 2 выделения сигнала содержит блок 6 переключающих элементов, блок 7 формирования импульсов, блок 8 контроля и блок 9 логики, выход которого является выходом блока 2 выделения сигнала. Блок 2 выделения сигнала обрабатывает сигналы ЭДС, возникающие в отключенной обмотке двигателя 1, и формирует импульсный сигнал, частота которого пропорциональна угловой скорости двигателя 1, измерение которой осуществляется блоком 3 измерения. 2 з.п.ф-лы. 3 ил.
Фиг.1
Изобретение относится к измерению и контролю параметров движения и может быть использовано для измерения угловой скорости двухскоростного асинхронного двигателя с короткозамкнутым ротором и двумь независимыми статорными обмотками.
Цель изобретения - повышение надежности и точности измерения скорости.
На фиг. 1 показана схема устройства для измерения скорости двухскоростного асинхронного двигателя: на фиг.2 - схема блока формирования сигнала; на фиг.З - схема блокэ контроля.
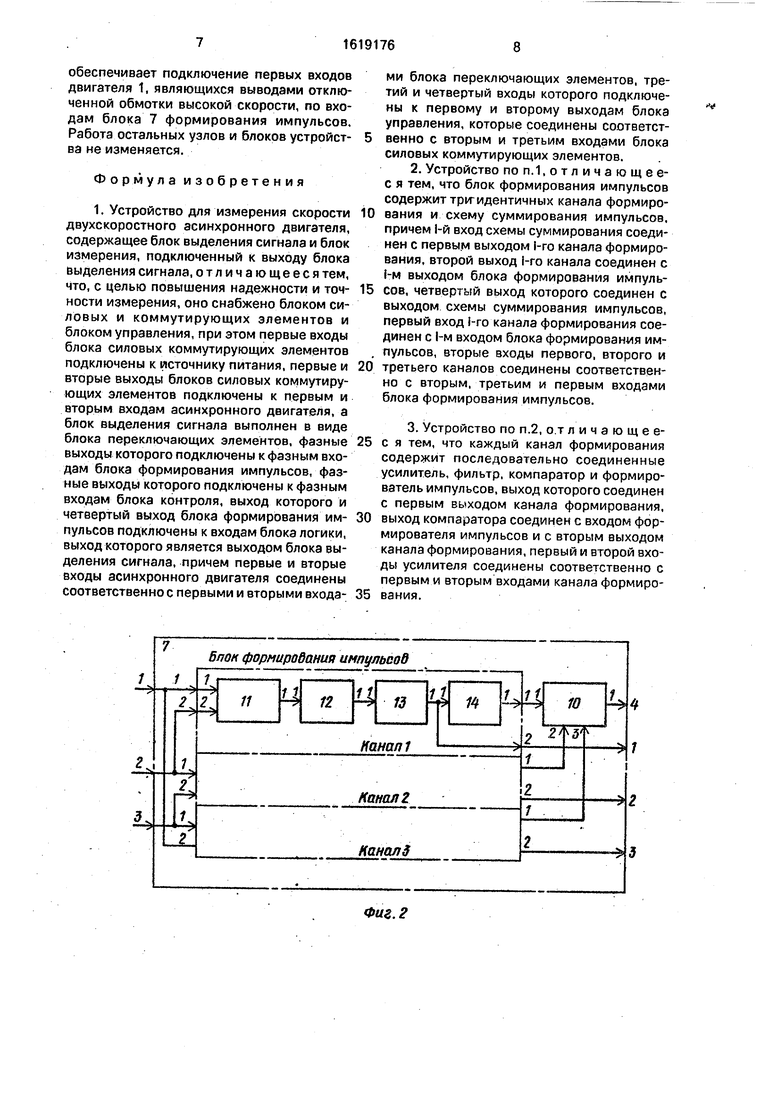
Устройство (фиг.1) содержит двухскоро- стной асинхронный двигатель 1, блок 2 выделения сигнала и блок 3 измерений, подключенный к ь ,ходу блока 2, блоки силовых коммутирующих элементов 4 и управления 5, причем блок 2 выделения сигнала содержит блоки перэключающих элементов 6, формирования импульсов 7, контроля 8 и логики 9, выход последнего является выходом блока 2 выделения сигнала, первые входы блока 4 силовых коммутирующих элементов подключены к источнику питания, первые и вторые выходы блока 4 сило- зых коммутирующих элементов подключены к первым и вторым входам асинхронного двигателя 1, являющимся выводами обмоток высокой и низкой скорости, и соединены соответственно с первыми и вторыми входами блока 6 переключающих элементов, третий и четвертый входы которого подключены к первому и второму выходам блока 5 управления, которые соединены соответственно с вторым и третьим входами блока 4 силовых коммутирующих элементов, первые три выхода блока 6 переключающих элементов соединены соответственно с первыми тремя входами блока 7 формирования импульсов, первые тр/i выхода которого соединены с первыми тремя входами блока 8 контроля, выход которого соединен с вторым входом блока 9 логики, первый вход которого соединен с четвертым выходом блока 7 формирования импульсов. Последний (фиг.2) содержит три идентичных канала формирования и схему 10 суммирования импульсов, причем каждый канал формирования содержит последовательно соединенные усилитель 11, фильтр 12, компаратор 13 и формирователь 14 импульсов, выход которого соединен с соответствующим входом схемы суммирования импульсов. Блок 8 контроля содержит три D-триггера 15-17, D-входы которых подключены соответственно к трем входам блока контроля. Вь.ход первого D-триггера 15 соединен с R-входом второго, а выход второго D-триггера 16 - с R-входом третьего, выход которого является выходом блока контроля. RS-входы первого D-триггера и S-входы второго и третьего через резистор
RI соединены с шиной питания. С-вход первого D-триггера соединен с вторым входом блока контроля, а С-входы второго и третьего входов соответственно с третьим и первым входами блока контроля.
Сущность технического решения основана на физических процессах, происходящих в реальной асинхронной машине, заключающихся в том, что в асинхронном двигателе, кроме потока рабочей гармоники, существуют потоки высших гармоник статора и ротора порядков v и и. Основными причинами возникновения этих гармоник являются дискретное расположение обмоток в пазах, воздействие пазов статора
и ротора на магнитное поле рабочей гармоники. В спектре гармоник преобладают гар- моники, создаваемые током ротора основной частоты
25
f2 Sfl.
(1)
где fa - частота токов ротора; f т - частота токов статора; S - сксльхение. 30 Порядок этой гармоники поля ротора
+ 1,
(2)
где 7.2 число пазов ротора;
Р - число полюсов рабочей обмотки;
«2 - любое целое число.
Частота токов , наводимых этими гармониками в статоре
)0 S)-fi.(3)
С учетом (2) выражение (3) имеет вид
45
+§-K2(1-S)-fi.
(4)
В двухскоросчном асинхронном двигателе с короткозамкнутым ротором и двумя
независимыми статорными обмотками при подключении одной из них к источнику питания вторая может быть использована в качестве измерительной. Поскольку в двух- скоростном двигателе электрические оси
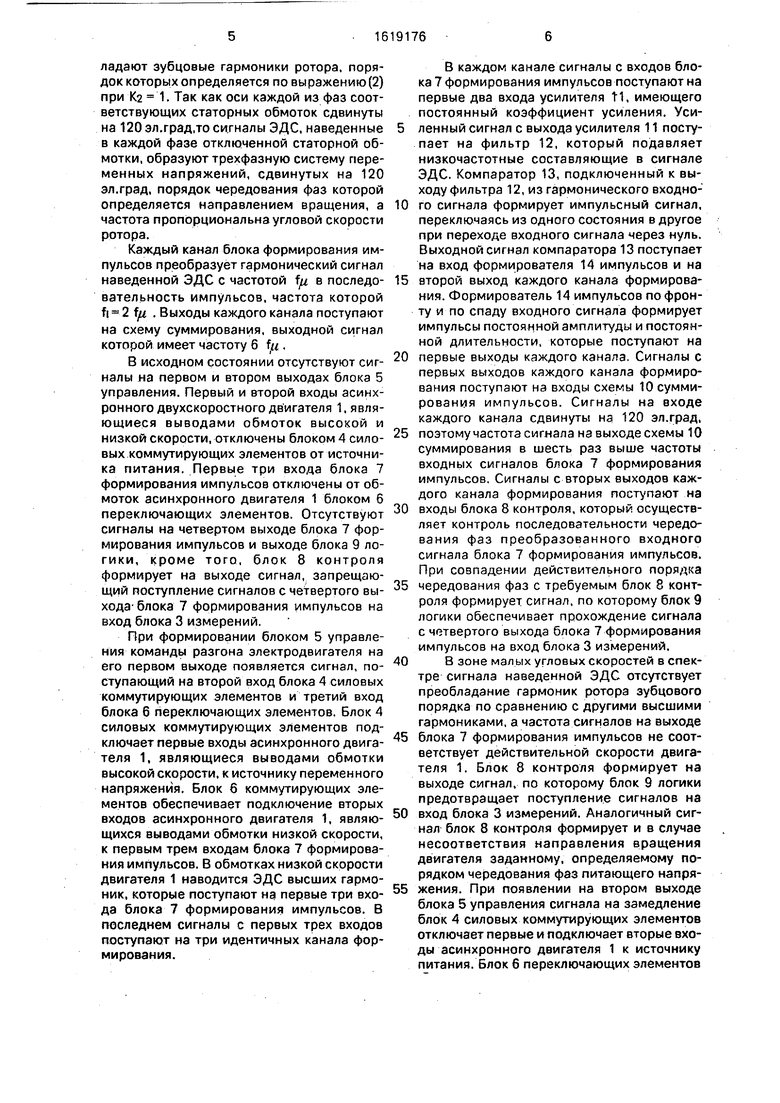
обмоток с различным числом полюсов смещены на 90 град, то при работе одной обмотки в другой отсутствует ЭДС, обусловленная полем рабочей гармоники, а наводится только ЭДС высших гармоник. В спектре преобладают зубцовые гармоники ротора, порядок которых определяется по выражению (2) при Ка 1. Так как оси каждой из фаз соответствующих статорных обмоток сдвинуты на 120 эл.граддо сигналы ЭДС, наведенные в каждой фазе отключенной статорной обмотки, образуют трехфазную систему переменных напряжений, сдвинутых на 120 эл.град, порядок чередования фаз которой определяется направлением вращения, а частота пропорциональна угловой скорости ротора.
Каждый канал блока формирования импульсов преобразует гармонический сигнал наведенной ЭДС с частотой f« в последовательность импульсов, частота которой fi 2 fyu , Выходы каждого канала поступают на схему суммирования, выходной сигнал которой имеет частоту б f« .
В исходном состоянии отсутствуют сигналы на первом и втором выходах блока 5 управления. Первый и второй входы асинхронного двухскоростного двигателя 1, являющиеся выводами обмоток высокой и низкой скорости, отключены блоком 4 силовых коммутирующих элементов от источника питания. Первые три входа блока 7 формирования импульсов отключены от обмоток асинхронного двигателя 1 блоком 6 переключающих элементов. Отсутствуют сигналы на четвертом выходе блока 7 формирования импульсов и выходе блока 9 логики, кроме того, блок 8 контроля формирует на выходе сигнал, запрещающий поступление сигналов с четвертого выхода- блока 7 формирования импульсов на вход блока 3 измерений.
При формировании блоком 5 управления команды разгона электродвигателя на его первом выходе появляется сигнал, поступающий на второй вход блока 4 силовых коммутирующих элементов и третий вход блока б переключающих элементов. Блок 4 силовых коммутирующих элементов подключает первые входы асинхронного двигателя 1, являющиеся выводами обмотки высокой скорости, к источнику переменного напряжения. Блок б коммутирующих элементов обеспечивает подключение вторых входов асинхронного двигателя 1, являющихся выводами обмотки низкой скорости, к первым трем входам блока 7 формирования импульсов. В обмотках низкой скорости двигателя 1 наводится ЭДС высших гармоник, которые поступают на первые три входа блока 7 формирования импульсов. В последнем сигналы с первых трех входов поступают на три идентичных канала формирования.
В каждом канале сигналы с входов блока 7 формирования импульсов поступают на первые два входа усилителя t1, имеющего постоянный коэффициент усиления. Усиленный сигнал с выхода усилителя 11 поступает на фильтр 12, который подавляет низкочастотные составляющие в сигнале ЭДС. Компаратор 13, подключенный к выходу фильтра 12, из гармонического входно0 го сигнала формирует импульсный сигнал, переключаясь из одного состояния в другое при переходе входного сигнала через нуль. Выходной сигнал компаратора 13 поступает на вход формирователя 14 импульсов и на
5 второй выход каждого канала формирования. Формирователь 14 импульсов по фронту и по спаду входного сигнала формирует импульсы постоянной амплитуды и постоянной длительности, которые поступают на
0 первые выходы каждого канала. Сигналы с первых выходов каждого канала формирования поступают на входы схемы 10 суммирования импульсов. Сигналы на входе каждого канала сдвинуты на 120 эл.град,
5 поэтому частота сигнала на выходе схемы 10 суммирования в шесть раз выше частоты входных сигналов блока 7 формирования импульсов. Сигналы с вторых выходов каждого канала формирования поступают на
0 входы блока 8 контроля, который осуществляет контроль последовательности чередования фаз преобразованного входного сигнала блока 7 формирования импульсов. При совпадении действительного порядка
5 чередования фаз с требуемым блок 8 контроля формирует сигнал, по которому блок 9 логики обеспечивает прохождение сигнала с четвертого выхода блока 7 формирования импульсов на вход блока 3 измерений.
0В зоне малых угловых скоростей в спектре сигнала наведенной ЭДС отсутствует преобладание гармоник ротора зубцового порядка по сравнению с другими высшими гармониками, а частота сигналов на выходе
5 блока 7 формирования импульсов не соответствует действительной скорости двигателя 1. Блок 8 контроля формирует на выходе сигнал, по которому блок 9 логики предотвращает поступление сигналов на
0 вход блока 3 измерений. Аналогичный сигнал блок 8 контроля формирует и в случае несоответствия направления вращения двигателя заданному, определяемому порядком чередования фаз питающего напря5 жения. При появлении на втором выходе блока 5 управления сигнала на замедление блок 4 силовых коммутирующих элементов отключает первые и подключает вторые входы асинхронного двигателя 1 к источнику питания. Блок 6 переключающих элементов
обеспечивает подключение первых входов двигателя 1, являющихся выводами отключенной обмотки высокой скорости, по входам блока 7 формирования импульсов. Работа остальных узлов и блоков устройст- ва не изменяется.
Формула изобретения
ми блока переключающих элементов, третий и четвертый входы которого подключены к первому и второму выходам блока управления, которые соединены соответственно с вторым и третьим входами блока силовых коммутирующих элементов.
Фиг. 2
Фиг. J
| УСТРОЙСТВО для ИЗМЕРЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 0 |
|
SU345441A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения скорости вращения индукторного асинхронного двигателя | 1976 |
|
SU613242A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
