1
(21)4643302/24
(22)25.01.89
(46) 07.01.91. Еюл. № 1
(71)Фрунзенский политехнический ин - ститут
(72)Н.Н.Горбина и Е.Л.Еремин
(53)62-50(088.8)
(56)Авторское свидетельство СССР № 1325403, кл. G 05 В 11/01, 1985.
Авторское свидетельство СССР Ь 1534428, кл. G 05 В 11/01 1985.
(54)СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ
(57)Изобретение относится к металлургии, нефтепереработке и к другим отраслям техники, в которых осуществляется управление непрерывными технологическими процессами с постоянным транспортным запаздыванием материальных потоков. Цепь изобретения - упрощение конструкции. Поставленная цель достигается тем, что в системе, содержащей задатчик 1, сумматор 2, регулятор 3, подключаемый к объекту 4 регулирования, блок 5 запаздывания, интегратор 6, блок 7 сравнения,
выход регулятора 3 соединен г входом объекта 4 регулирования, нопключен-- кого выходом к входу сумматора 2, дополнительно выход задатчика соединен с другим входом сумматора 2, подключенного выходом к входу регулятора 3, выход которого соединен с первым входом блока 7 сравнения, подключенного выходом к входу интегратора 6 и к следующему входу сумматора 2, выход интегратора 6 соединен с другим входом блока 7 сравнения и очередным входом сумматора, а через блок запаздывания - еще с одним входом того же сумматора. Исключив из системы сумматор, два усилителя и дифференциатор и изменив некоторые связи между оставшимися блоками, получают на входе регулятора сигнал, аналогичный сигналу в известной системе. Следовательно, такое выполнение системы позволяет существенно упростить конструкцию и сохранить при этом ее функцию, которая заключается в обеспечении асимптотической гиперустойчивости. 1 ил.
с
(О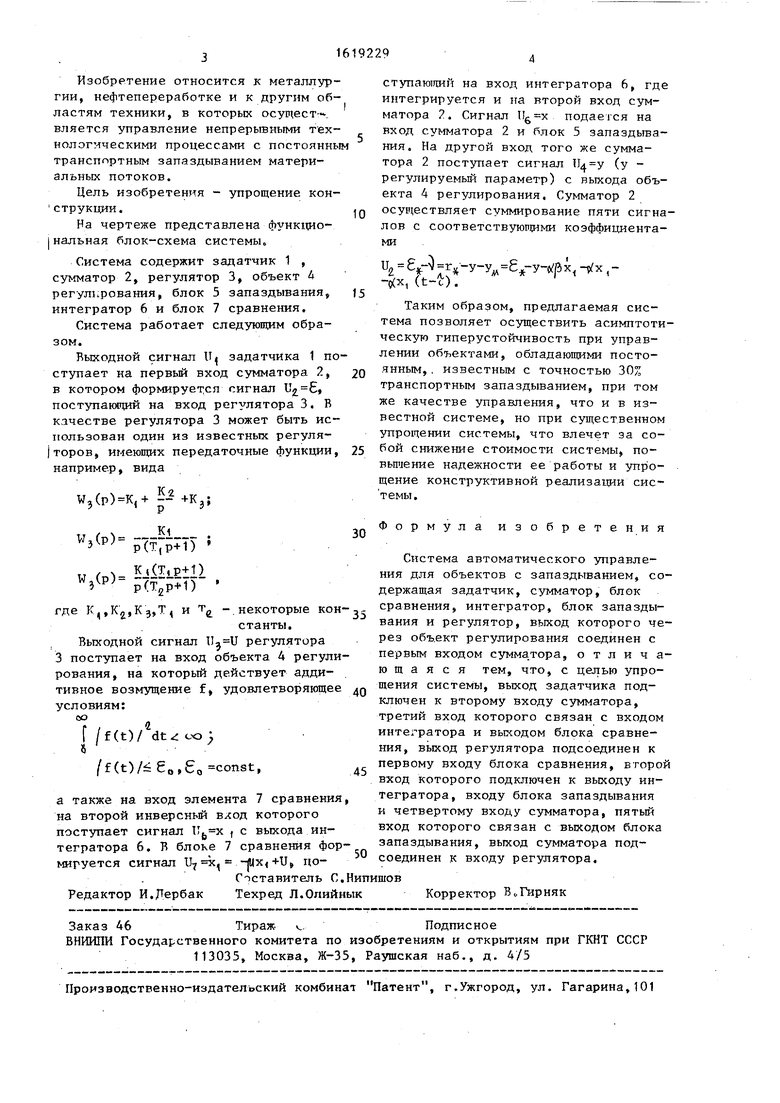

1C
JU
Изобретение относится к металлургии, нефтепереработке и к другим областям техники, в которых осущест- вляется управление непрерывными технологическими процессами с постоянным транспортным запаздыванием материальных потоков.
Цель изобретения - упрощение конструкции.
На чертеже представлена функцио- jнальная блок-схема системы.
Система содержит задатчик 1 , сумматор 2, регулятор 3, объект 4 регулирования, блок 5 запаздывания, интегратор 6 и блок 7 сравнения.
Система работает следующим образом.
Выходной сигнал U задатчика 1 поступает на первьй вход сумматора 2, в котором формируется сигнал поступающий на вход регулятора 3. В качестве регулятора 3 может быть использован один из известных регуля10
15
20
ступающий на вход интегратора 6, где интегрируется и на второй вход сумматора . Сигнал подав ся на вход сумматора 2 и бпок 5 запаздывания. На другой вход того же сумматора 2 поступает сигнал (у - регулируемый параметр) с выхода объекта 4 регулирования. Сумматор 2 осуществляет суммирование пяти сигналов с соответствующими коэффициентами
U2 ЈН -Ух ,- -0(х, (t-Ъ .
Таким образом, предлагаемая система позволяет осуществить асимптотическую гиперустойчивость при управлении объектами, обладающими постоянным, известным с точностью 30% транспортным запаздыванием, при том же качестве управления, что и в известной системе, но при существенном упрощении системы, что влечет за соI торов, имеющих передаточные функции, 25 бой снижение стоимости системы, по- например видавышение надежности ее работы и упрощение конструктивной реализации сис- W3(P)K,+ -- +КЭ;темыW,(p)
Р К1
30
,р+1)
w}(p) рТтГр+ТГ
Формула изобретения
Система автоматического управления для объектов с запаздыванием, содержащая задатчик, сумматор, блок
где К.,К,,К3,Т. и те - некоторые сравнения, интегратор, блок запаздыстанты.
Выходной сигнал регулятора 3 поступает на вход объекта 4 регулирования, на который действует аддитивное возмущение f удовлетворяющее
40
вания и регулятор, выход которого через объект регулирования соединен с первым входом сумматора, отличающаяся тем, что, с целью упрощения системы, выход зэдатчика подключен к второму входу сумматора, третий вход которого связан с входом интегратора и выходом блока сравнения, выход регулятора подсоединен к первому входу блока сравнения, второй вход которого подключен к выходу интегратора, входу блока запаздывания и четвертому входу сумматора, пятый вход которого связан с выходом блока запаздывания, выход сумматора подсоединен к входу регулятора.
условиям: со
f /f(t)/ dt со ; 6
/f(t)/Ј const,
вход элемента 7 сравнения, инверсный вход которого сигнал f с выхода ин6. В блоке 7 сравнения форигнал , цоСчставитель С.Нипишов И.Дербак Техред Л.Олийнык
вани рез пер ющ щени ключ тре инт ния перв вход тегр и ч вход запа соед
0
5
0
ступающий на вход интегратора 6, где интегрируется и на второй вход сумматора . Сигнал подав ся на вход сумматора 2 и бпок 5 запаздывания. На другой вход того же сумматора 2 поступает сигнал (у - регулируемый параметр) с выхода объекта 4 регулирования. Сумматор 2 осуществляет суммирование пяти сигналов с соответствующими коэффициентами
U2 ЈН -Ух ,- -0(х, (t-Ъ .
Таким образом, предлагаемая система позволяет осуществить асимптотическую гиперустойчивость при управлении объектами, обладающими постоянным, известным с точностью 30% транспортным запаздыванием, при том же качестве управления, что и в известной системе, но при существенном упрощении системы, что влечет за со
Формула изобретения
Система автоматического управления для объектов с запаздыванием, содержащая задатчик, сумматор, блок
сравнения, интегратор, блок запазды
вания и регулятор, выход которого через объект регулирования соединен с первым входом сумматора, отличающаяся тем, что, с целью упрощения системы, выход зэдатчика подключен к второму входу сумматора, третий вход которого связан с входом интегратора и выходом блока сравнения, выход регулятора подсоединен к первому входу блока сравнения, второй вход которого подключен к выходу интегратора, входу блока запаздывания и четвертому входу сумматора, пятый вход которого связан с выходом блока запаздывания, выход сумматора подсоединен к входу регулятора.
Корректор В„Гирняк
