Изобретение относится к автоматике и может быть использовано в системах управления астатическими объектами с запаздыванием.
Цель изобретения - упрощение конструкции и расширение функциональных возможностей.
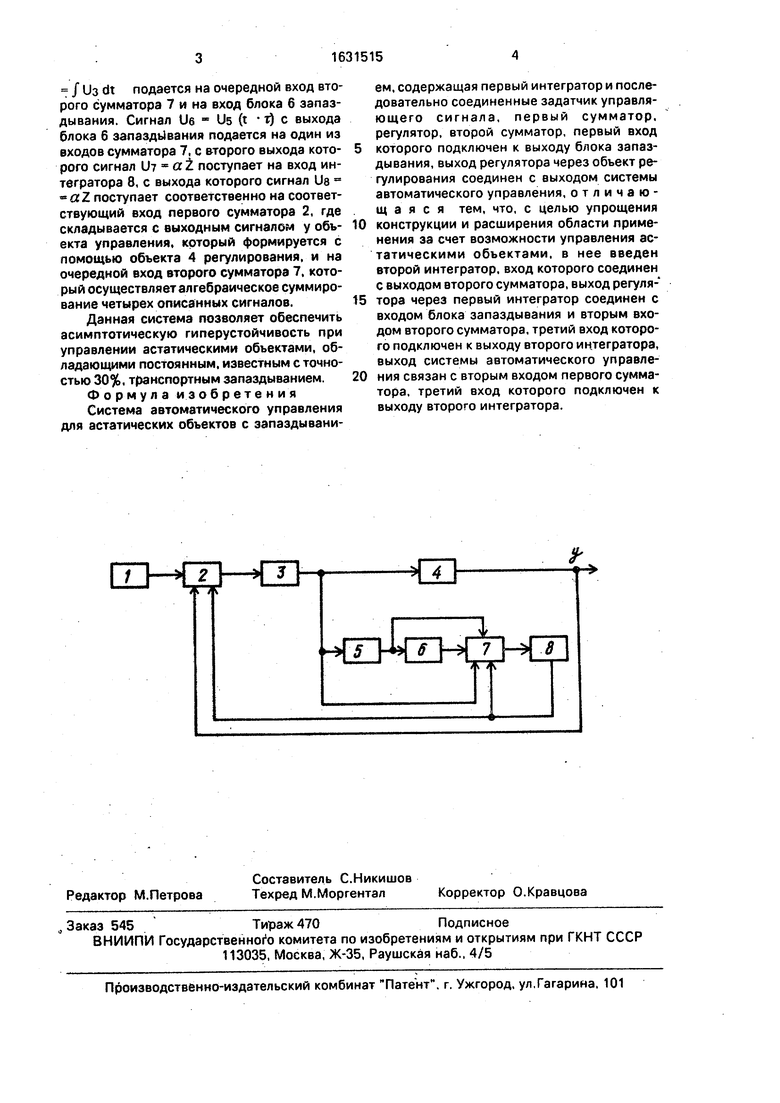
На чертеже представлена блок-схема системы.
Система содержит задатчик 1 управляющего сигнала, первый сумматор 2, регулятор 3, объект 4 регулирования, первый интегратор 5, блок 6 запаздывания, второй сумматор 7 и второй интегратор 8.
Рассматривается астатический объект управления с передаточной функцией вида
Wo(P)R(P)e
-Pr
Р Q (Р)
(D
Поставленная цель достигается за счет введения дополнительного контура с передаточной функцией
.(р)р+°()Система функционирует следующим образом.
Сигнал Ui г с выхода задатчика 1 управляющего сигнала поступает на третий вход первого сумматора. Сигнал U2 v с выхода первого сумматора 2 поступает на вход регулятора 3. Управляющее воздействие Us - V (у) с выхода регулятора 3 подается соответственно на входы объекта 4 регулирования, первого интегратора 5 и на один вход второго сумматора 7. Сигнал у с выхода объекта 4 регулирования подается на соответствующий вход первого сумматора 2. С выхода интегратора 5 сигнал Us О
со
5 ел
/ Уз dt подается на очередной вход второго сумматора 7 и на вход блока 6 запаздывания. Сигнал Ue Us (t т) с выхода блока 6 запаздывания подается на один из входов сумматора 7, с второго выхода которого сигнал UT a 2 поступает на вход интегратора 8, с выхода которого сигнал Us ««Z поступает соответственно на соответствующий вход первого сумматора 2, где складывается с выходным сигналом у объекта управления, который формируется с помощью объекта 4 регулирования, и на очередной вход второго сумматора 7. который осуществляет алгебраическое суммирование четырех описанных сигналов.
Данная система позволяет обеспечить асимптотическую гиперустойчивость при управлении астатическими объектами, обладающими постоянным, известным с точностью 30%, транспортным запаздыванием. Формула изобретения Система автоматического управления для астатических объектов с запаздыванием, содержащая первый интегратор и последовательно соединенные задатчик управляющего сигнала, первый сумматор, регулятор, второй сумматор, первый вход
которого подключен к выходу блока запаздывания, выход регулятора через объект регулирования соединен с выходом системы автоматического управления, отличающаяся тем, что, с целью упрощения
конструкции и расширения области применения за счет возможности управления астатическими объектами, в нее введен второй интегратор, вход которого соединен с выходом второго сумматора, выход регулятора через первый интегратор соединен с входом блока запаздывания и вторым входом второго сумматора, третий вход которого подключен к выходу второго интегратора, выход системы автоматического управления связан с вторым входом первого сумматора, третий вход которого подключен к выходу второго интегратора.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2011 |
|
RU2468406C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2005 |
|
RU2288496C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2013 |
|
RU2513847C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДЛЯ АСТАТИЧЕСКИХ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ | 2001 |
|
RU2192030C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2011 |
|
RU2459226C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ АСТАТИЧЕСКИХ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2005 |
|
RU2282883C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ АСТАТИЧЕСКИХ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2010 |
|
RU2437137C2 |
| Бинарная система управления | 1988 |
|
SU1697054A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЫТЯГИВАНИЕМ ВОЛОКНА ПРИ ФОРМОВАНИИ | 2003 |
|
RU2237759C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2015 |
|
RU2612340C1 |
Изобретение относится к автоматике и может быть использовано в системах управления астатическими объектами с запаздыванием. Цель изобретения - расширение функциональных возможностей системы и упрощение конструкции. Поставленная цель достигается тем, что в систему, содержащую задатчик, регулятор, блок запаздывания, объект регулирования, первый и второй сумматоры и интегратор, дополнительно введен второй интегратор, что позволило отказаться от блока дифференцирования. 1 ил. -г и
| Устройство для компенсации запаздывания | 1985 |
|
SU1325403A1 |
| Система автоматического управления для объектов с запаздыванием | 1987 |
|
SU1534428A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
