темы; Ј - сигнал возмущения; Y - релируемый параметр.
Система работает следующим образом.
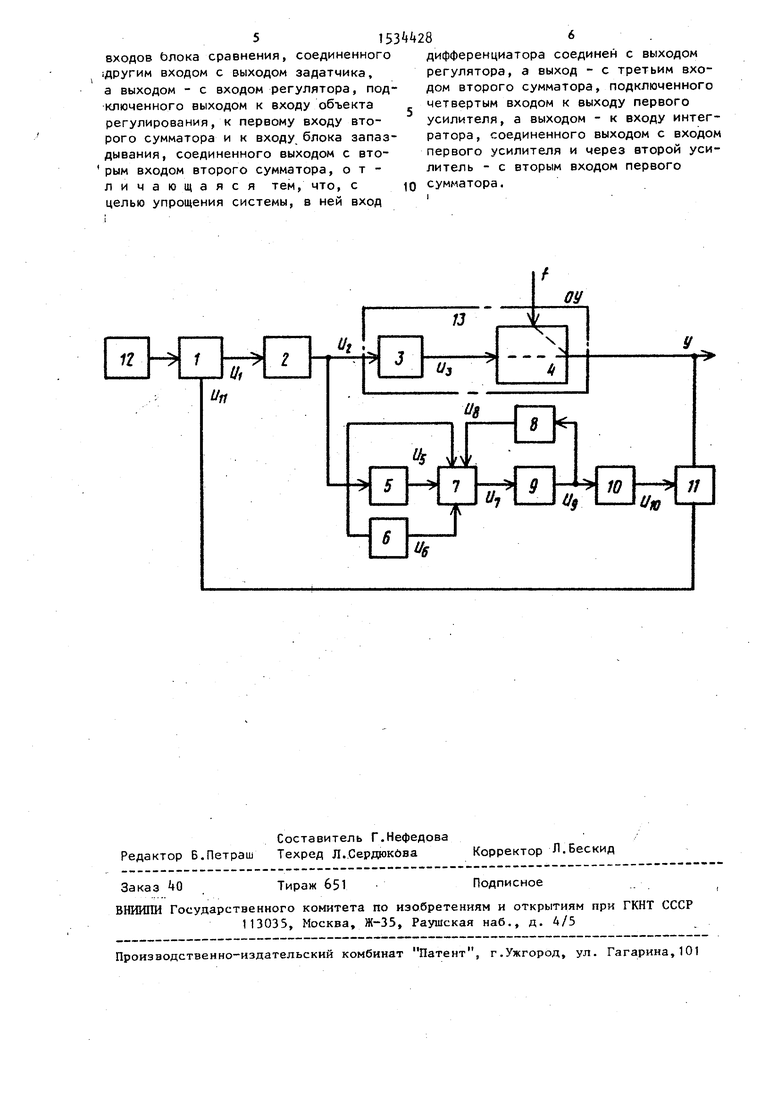
Выходной сигнал Ufl задатчика 12 поступает на первый вход блока 1 срнения, в котором сравнивается с выходным сигналом U,, первого сумматора 11. На выходе блока 1 сравнения формируется сигнал U, Utl- U , который поступает на вход регулятора 2. В качестве регулятора 2 может быть использован один из известных регуляторов, имеющих передаточные функции, например, вида: - К
WjCP) + К5Р;
+к,
w2U)
Р Х,Р+1) P() где К., - К,, Т, и Т2 const 0.
w, 09
Выходной сигнал U2 регулятора 2 поступает на вход объекта 13 регулирования, на который действует аддитивное возмущение f, удовлетворяющее условиям
о
J/f (t)/7dt ; /f (t)/ Е ; Ј.- о
Е const,
и на выходе которого формируется регулируемая координата
(P) -,w4(P) U2 + w,(P) f, где w3(P) e-pV- ;
AmPm + . ..+A,P +A0
) в™Р Т77 в7р+в7;
... +c,p+cu w4 (p) 5 рт 777 5 р+50;
А,Б,С и D - коэффициенты.
Выходной сигнал U регулятора 2 поступает на первый вход второго сумматора 7 и на входы блока 5 запаздывания и дифференциатора 6. На выходе Ьлока 5 запаздывания формируется сигнал
Uj w5tP)-LU, где w5tf) е ;
0,15СЧ , поскольку в при 1У1адных задачах управления объектами 13 с запаздыванием диапазон определения величины запаздывания не превышает 20-30% от величины t запаздывания объекта 13 регулирования.
На выходе дифференциатора 6 формируется сигнал Ut w t (P) -U2. В качестве дифференциатора 6 может быть применен дифференциатор, например, имеющий передаточную функцию вида
/ Р
w;(P)
V1
где Т const 0.
Выходной сигнал U5 блока 5 запаздывания, выходной сигнал Ut дифференциатора 6 и выходной сигнал Ug первого усилителя 8 поступают на второй, третий и четвертый входы второго сумматора 7, на выходе которого формируется сигнал U7 U2 U5 +U/ -Ug.
Выходной сигнал U7 сумматора 1 интегрируется в интеграторе 9, в качестве которого может быть использован интегратор с произвольными начальными условиями. Выходной сигнал U, интегратора 9 усиливается в усилителях 8 и 10, причем на выходе первого усилителя 8 формируется сигнал U. вида Uj , а на выходе второго усилителя 10 формируется сигнал U10 вида
U10 KwUj, где К8 и Ь ,0 - коэффициенты усиления усилителей 8 и 10. Выходной сигнал U(0 второго усилителя 10 суммируется с регулируемым параметром Y в первом сумматоре 11, на
выходе которого формируется сигнал
U,
U,e+ Y.
Таким образом, данная система позволяет обеспечить асимптотическую
гиперустойчивость при управлении объектами, обладающими постоянным, известным с точностью 30%, транспортным запаздыванием, при том же качестве управления, но при существенном
упрощении системы, что влечет за собой снижение стоимости системы, повышение надежности ее работы и упрощение конструктивной реализации системы.
50
Формула изобретения
Система автоматического управления для объектов с запаздыванием, содержащая интегратор, дифференциатор, первый и второй усилители, объект регулирования, соединенный выходом с первым входом первого сумматора, подключенного выходом к одному из
входов олока сравнения, соединенного .другим входом с выходом задатчика, а выходом - с входом регулятора, подключенного выходом к входу объекта регулирования, к первому входу второго сумматора и к входу блока запаздывания, соединенного выходом с вторым входом второго сумматора, отличающаяся тем, что, с целью упрощения системы, в ней вход
дифференциатора соединен с выходом регулятора, а выход - с третьим входом второго сумматора, подключенного четвертым входом к выходу первого усилителя, а выходом - к входу интегратора , соединенного выходом с входом первого усилителя и через второй усилитель - с вторым входом первого сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2013 |
|
RU2513847C1 |
| Система автоматического регулирования давления пара в магистрали барабанного котла | 2019 |
|
RU2746377C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2011 |
|
RU2468406C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2011 |
|
RU2459226C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2005 |
|
RU2288496C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2403607C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДЛЯ АСТАТИЧЕСКИХ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ | 2001 |
|
RU2192030C1 |
| Устройство с размытой логической самоорганизацией для автоматического управления объектом,например ректификационной колонной | 1986 |
|
SU1434402A1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 2002 |
|
RU2234116C1 |
Изобретение относится к металлургии, нефтепереработке и другим областям техники, в которых осуществляется управление непрерывными технологическими процессами с транспортным запаздыванием материальных потоков, которое может быть определено с точностью 30%, а материальные потоки подвержены аддитивному возмущению. Цель изобретения - упрощение системы при сохранении неизменным качества регулирования. Поставленная цель достигается за счет того, что сигнал задания сравнивается с сигналом главной обратной связи. Полученная разность преобразуется в регуляторе, в качестве которого может быть использован любой известный регулятор, например пропорционально-интегрально-дифференциальный. Выходной сигнал регулятора воздействует на объект регулирования, затем этот сигнал задерживается на время, равное времени запаздывания объекта регулирования, и, кроме того, этот сигнал дифференцируется. Полученные сигналы алгебраически суммируются и интегрируются в интеграторе, охваченном местной жесткой обратной связью. Проинтегрированный сигнал усиливается и суммируется с регулируемой координатой, а полученный сигнал является сигналом главной обратной связи. 1 ил.
