Изобретение относится к машиностроению и является усовершенствованием электромеханического привода по авт.св. N 1441871.
Целью дополнительного изобретения является снижение энергоемкости и мощности электродвигателей исполнительных органов путем установки в привод дополнительного двигателя для управления исполнительными органами.
На чертеже изображена принципиальная кинематическая схема электромеханического привода исполнительных органов с четырьмя дифференциалами, в данном случае применительно к поточной сучкорезно-раскряжевочной линии (в общем случае возможно произвольное число дифференциалов и исполнительных органов).
Электромеханический привод исполнительных органов содержит электродвигатели 1-4, однотипные дифференциалы 5-8 с входными валами 9-12, с двумя выходными валами 13-16 и 17-20 соответственно.
Входные валы 9-12 связаны с двигателями 1-4, выходные валы 17-20 дифференциалов связаны между собой и с исполнительным органом 21 кинематической цепью 22, образованной коническими колесами 23-26, а другие выходные валы 13-16 дифференциалов взаимодействуют с другими исполнительными органами 27-30. Входные валы 9-12дифференциалов 5-8 снабжены тормозами 31-34, а выходные валы 13-16 - тормозами 35-38.
Кинематическая цепь 22 снабжена дополнительным двигателем 39, в качестве которого может быть использован как электродвигатель, так при необходимости и двигатель внутреннего сгорания.
Применительно к оборудованию сучкорезно-раскряжевочной линии установлены следующие исполнительные рабочие органы: пильный диск 21, подающий транспоpтеp 27, прижимный ролик 28, сучкорезные ножи 29, пильная рамка 30 (т.е. поворотный в вертикальной плоскости рычаг, на конце которого смонтирован пильный диск).
При этом скорости элементов кинематической цепи, соединяющей выходные валы дифференциалов, должны оставаться примерно одинаковыми как от включения электродвигателей 1-4, так и от включения дополнительного двигателя 39.
Электромеханический привод исполнительных органов работает следующим образом.
Первоначально приводится во вращение пильный диск (исполнительный орган 21). Для этого включается двигатель 39 кинематической цепи 22, а также при замкнутых тормозах 35-38 все электродвигатели 1-4, вращение от которых через соответствующие выходные валы 17-20 и также кинематическую цепь 22 передается исполнительному органу 21, т.е. пуск пилы осуществляется с использованием всей установленной мощности привода. В дальнейшем дополнительный двигатель 39 и пила вращаются постоянно.
Далее в работу включается подающий транспортер (исполнительный рабочий орган 27). Для этого электродвигатель 1 останавливают и ставят на тормоз 31 при одновременном открытии тормоза 35.
Вращение от дополнительного двигателя 39 через выходной вал 17 дифференциала 5 и его второй выходной вал 13 передается транспортеру. Одновременно вращение от двигателей 2-4 через выходные валы 18-20, кинематическую цепь 22, конические колеса 23, валы 17 и 13 дифференциала 5 также передается исполнительному органу 27, который приводится во вращение четырьмя двигателями 2-4 и 39.
Для остановки транспортера открывают тормоз 31, включают двигатель 1 и после остановки транспортера замыкают тормоз 35.
Для привода пильной рамки (исполнительный орган 30) открывают тормоз 38, останавливают двигатель 4 с замыканием тормоза 34 и вращение от двигателя 39 и двигателей 1-3 через кинематическую цепь 22 аналогичным образом передается исполнительному органу 30 (пильная рамка в данном случае выполнена полноповоротной, т.е. на 360о). После завершения полного оборота пильной рамки, т. е. после завершения процесса резания, открывают тормоз 34, включают двигатель 4 и замыкают тормоз 38. Исполнительный орган остановлен.
Аналогичным образом осуществляется подъем прижимного ролика 28 и развод сучкорезных ножей 29, их ход - прижатие осуществляется открытием тормозов 36 и 37 без выключения двигателей 2 и 3.
Расчеты показывают, что наличие приводного двигателя 39 обеспечивает меньшую суммарную потребную мощность всех двигателей для выполнения произвольной циклограммы работы исполнительных органов.
Кроме того, выбор мощностей электродвигателей 1-4 обосновывается исключительно функциями управления соответствующих им исполнительных органов и не связывается, как в известном режиме, с дополнительным решением задач привода других исполнительных органов.
Изобретение относится к машиностроению. Целью изобретения является снижение энергоемкости и мощности электродвигателя исполнительных органов путем установки в привод дополнительного двигателя для управления исполнительными органами. При работе привода дополнительный двигатель 39 вращается постоянно, а для включения в работу какого-либо исполнительного органа 27 - 30 отключается соответствующий двигатель 1 - 4 и ставится на тормоз 31 - 34 при одновременном открытии тормоза 35 - 38. 1 ил.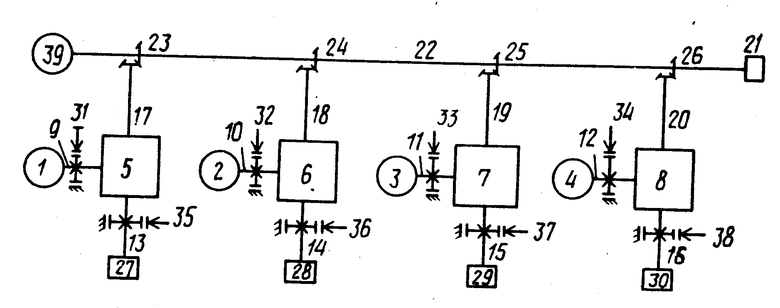
ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ по авт. св. N 1441871, отличающийся тем, что, с целью снижения энергоемкости и мощности электродвигателей, он снабжен дополнительным двигателем, включенным в кинематическую цепь, связывающую между собой выходные валы дифференциалов.
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ | 1984 |
|
SU1441871A1 |
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
