Изобретение (относится к промышленному транспорту, а именно к спосо бу упранлрния оснопным и дополнительным npHiBOAastti конвейера для хлыстов.
Цель изобретения - увеличение дол говечности приводов и конвейера и расширение зкг.п.пуатлиионных возможно терг.
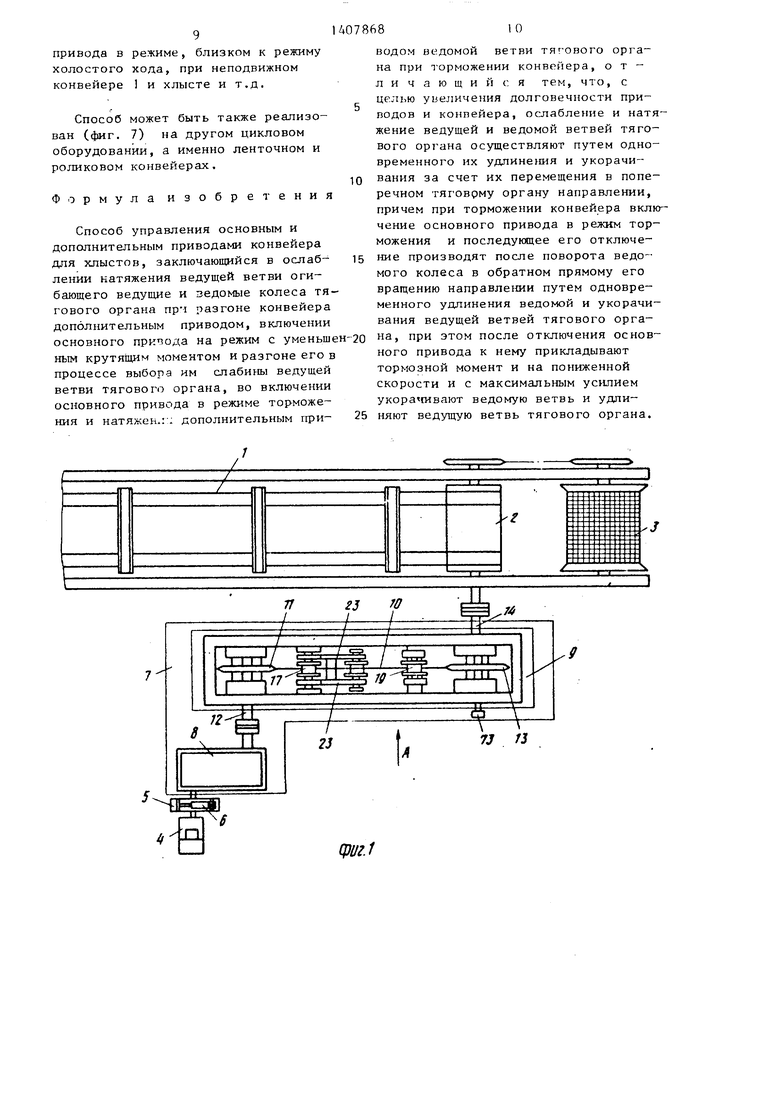
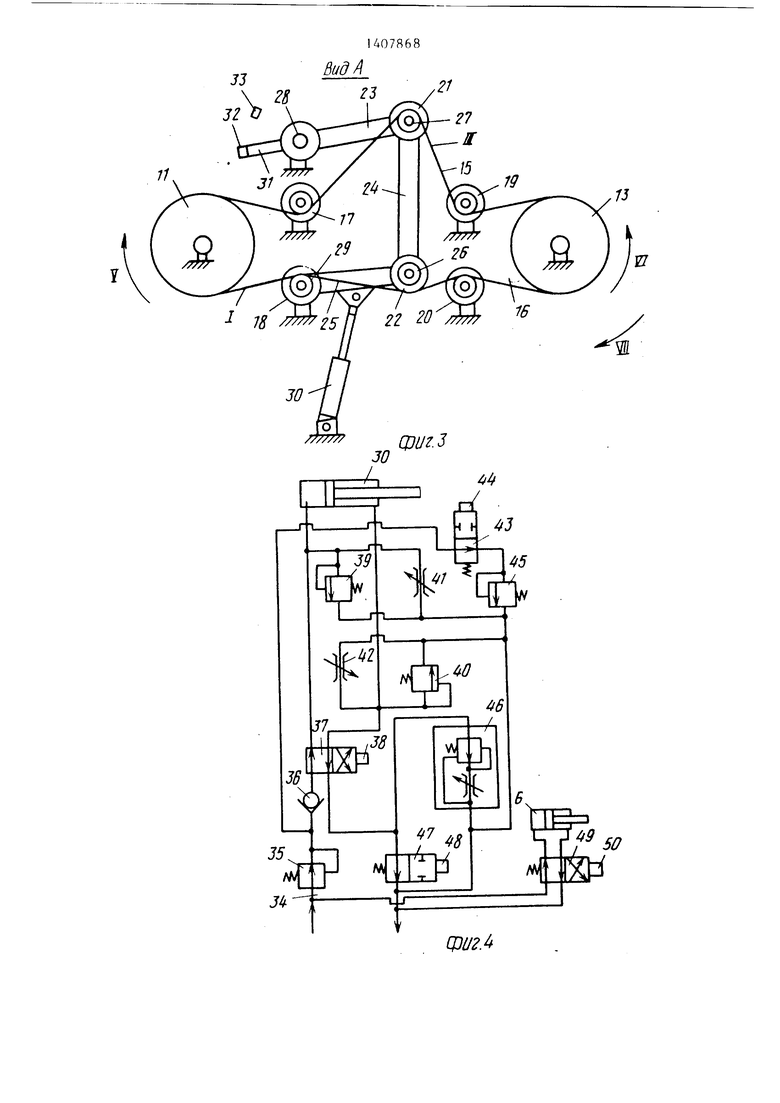
На фиг. 1 изображен конвейер для подачи хлыстов на заданные длины сортиментов раскряжевочной установки, вид сверху; на фиг. 2 - вид А на
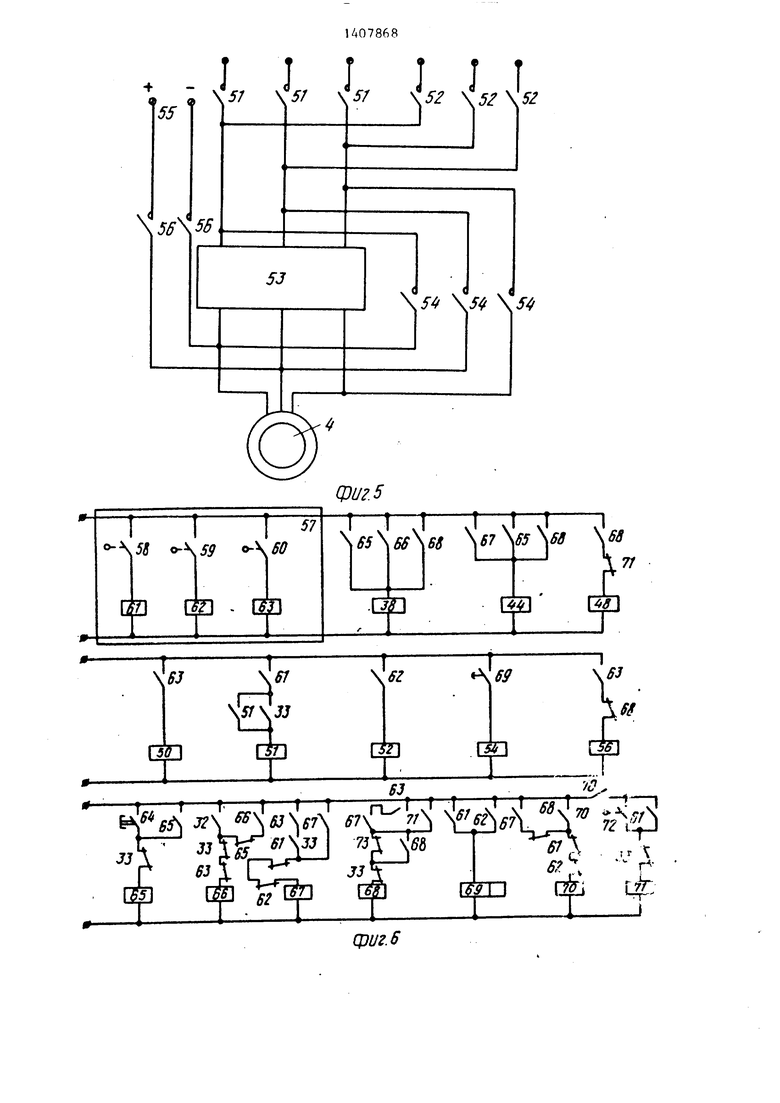
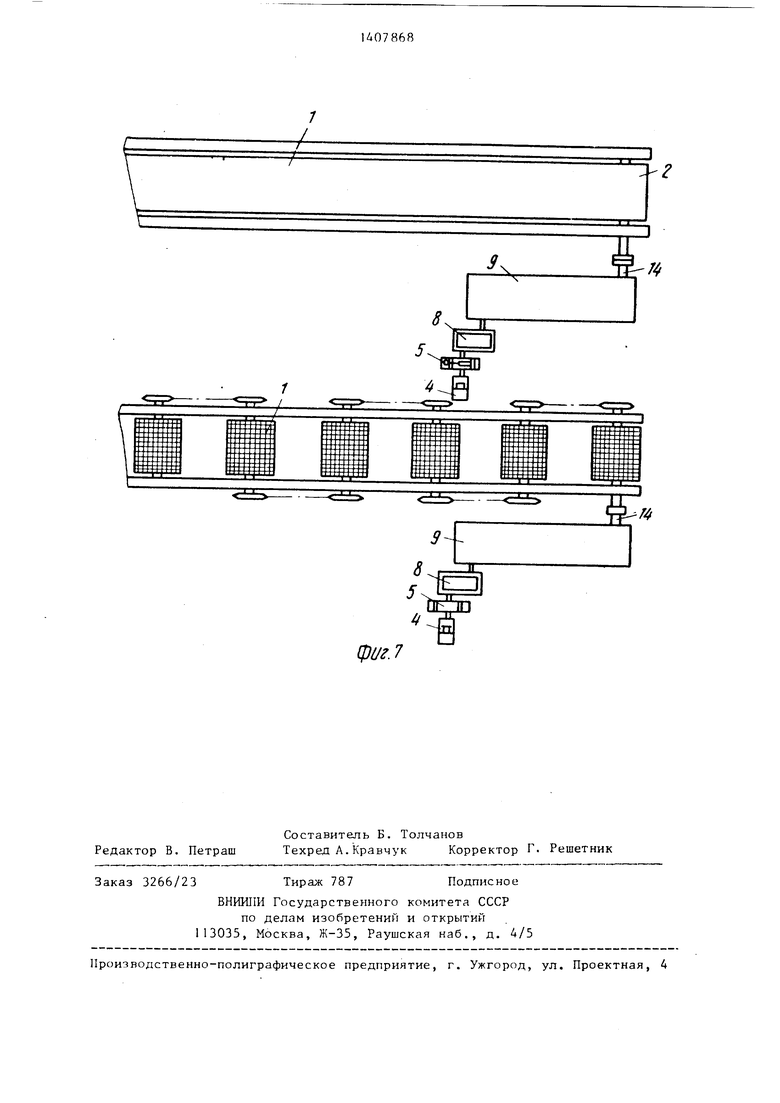
на фиг. 1, кинематическая схема передачи основного привода с гибкой связью и дополнительным приводом при нижнем положении подвижных ков; на (|inr. 3 то же, при верхнем положении подвижных роликов; на фиг. 4 -- гидросхема устройства; на фиг. 5 силовая схема подключения двигателя основного привода к сети; на фиг. 6 - схема управления устройством в целом; на фиг. 7 -- схе ма реализации способа для ленточного и роликового конвейеров.
Устройство для реализации способа содержит цепной конвейер 1 с приводным колесом 2, центрирующим роликом 3 и основным приводом, который содержит электродвигатель 4 с механическим тормозом 5 с приводом от гидроцилиндра 6 и передачу 7 основного привода.
Передача основного привода от дви гателя 4 до приводного колеса 2 содержит редуктор 8 и передачу 9 с гибкой связью. В свою очередь, передача 9 с гибкой связью содержит тяго- BbDi орган 10, огибающий ведущее коле со 11 вала 12 редуктора и ведомое колесо 13 выходного вала 14 основного привода в целом, посредством которого этот привод соединен непосредственно с приводным колесом 2 конвейера 1.
Тяговый орган 10 передачи 9 с гибкой связью имеет верхнюю ведомую
15 и нижнюю ведущую 16 ветви, которые работают в существенно различных условиях в зависимости от режимов работы двигателя, а в целом тяговый орган 10 передачи 9 с гибкой связью имеет предварительную слабин
С верхней ведомой 15 и нижней ведущер 16 всп-вями тягового органа 10 взаимодейс-гнуют стационарные ролики 17 2(1 и 111)дни-жные ролики 21 и
0
5
0
5
5
0
0
5
0
5
22, ксггорые установлены на механизме их под1)(}ма и опускания с рычагами , соеди нными один с другим шарнирами 26 и 2/, а шарнирами 28 и 29 -закрепленными на основании с нозможнос-г1,ю подъема и опускания под действием гидроцш1индра 30 допол- нительно о привода. При этом ниам подъема и опуска)шя роликов снабжен включающим элементом 31 и датчиками 32 и 33 верхнего и. нижнего положений роликов.
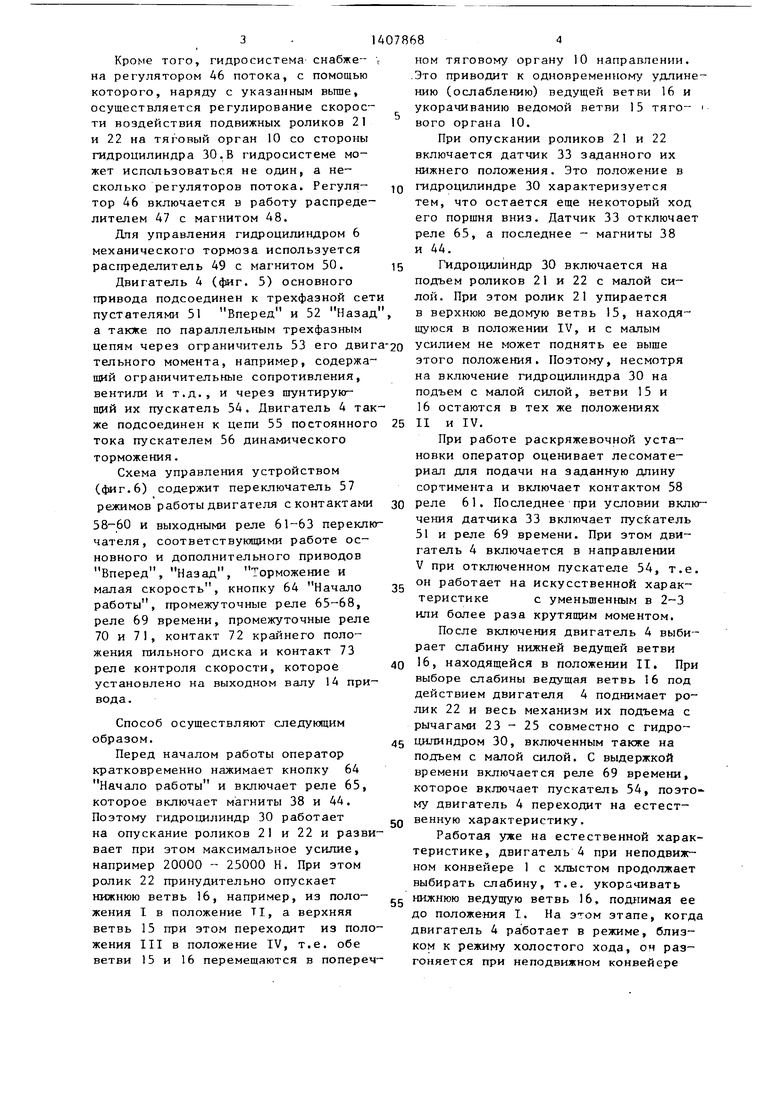
Дополнительный привод с гидро- цилиидрсм 30, взаимодействующий через ролики 21 и 22 с тяговым органом 10, снабже 1 также гидросистемой управления (фиг. 4) подъемом и опусканием верхней ведомой I5 и нижней ведул ей 16 ветвей с изменением величин сил воздействия на них со стороны гидроцилиндра 30.
1 идросистема содержит напорную 34 и сливную магистрали. При этом напорная магистраль 34 соединена с гидросистемой через редукционный клапан 35 и обратньш клапан 36. Редук- ционньй клапан 35 используется для того, чтобы гидросистема дополнительного привода не влияла на работу гидроцилиндра 6 и другой гидроаппаратуры, например раскряжевочной установки в целом, с гидросистемой которой он может соединяться напорной магистралью 34.
Кроме того, гидросистема гидроци- линдра 30 содержит реверсивный распределитель 37 с магнитом 38, предохранительные клапаны 39 и 40 большого давления с дросселями 41 и 42 для амортизации и демпфирования штоковой и поршневой полостей гидроцилиндра 30 при рывках тягового органа 10.
С помощью распределителя 43 С магнитом 44 напорная магистраль 34 через предохранительный клапан 45 малого давления соединена со сливной магистралью. Поэтому клапаны 39 и 40 большог о давления, клапан 45 малого давления и реверсивный распределитель 37 совместно с гидроцилиндром 30 осу- П1ествляют изменения величин сил и направлений их действий на ветвях 15 и 16 с целью их принудительного подаема и опускания дополнительным гидроприводом с помощью подвижных роликов 2 и 22, которые осуществляются на всех этапах работы основного привода.
Кроме того, гидросистема снабжена регулятором 46 потока, с помощью которого, наряду с указанным выше, осуществляется регулирование скорости воздействия подвижных роликов 21 и 22 на тягорый орган 10 со стороны гидроцилиндра 30.В гидросистеме может использоваться не один, а несколько регуляторов потока. Регулятор 46 включается в работу распределителем 47 с магнитом 48.
Для управления гидроцилиндром 6 механического тормоза используется распределитель 49 с магнитом 50.
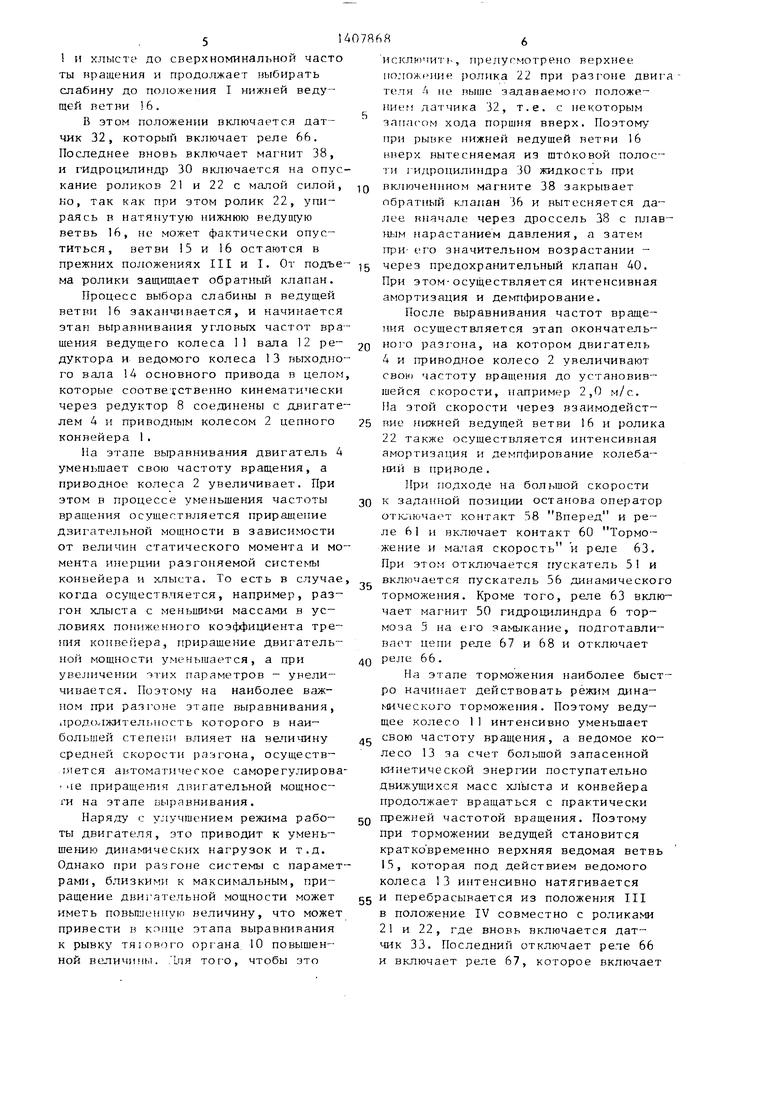
Двигатель 4 (фиг. 5) основного привода подсоединен к трехфазной сет пустателями 51 Вперед и 52 Назад а также по параллельным трехфазным
78684
ном тяговому органу 10 направлении.
.Это приводит к одновременному удлинению (ослаблению) ведущей ветви 16 и укорачиванию ведомой ветви 15 тяго- - вого органа 10.
При опускании роликов 21 и 22 включается датчик 33 заданного их нижнего положения. Это положение в
TQ гидроцилиндре 30 характеризуется тем, что остается еще некоторый ход его поршня вниз. Датчик 33 отключает реле 65, а последнее - магниты 38 и 44.
15Гидроцилиндр 30 включается на
подъем роликов 21 и 22 с малой силой. При этом ролик 21 упирается в верхнюю ведомую ветвь 15, находящуюся в положении IV, и с малым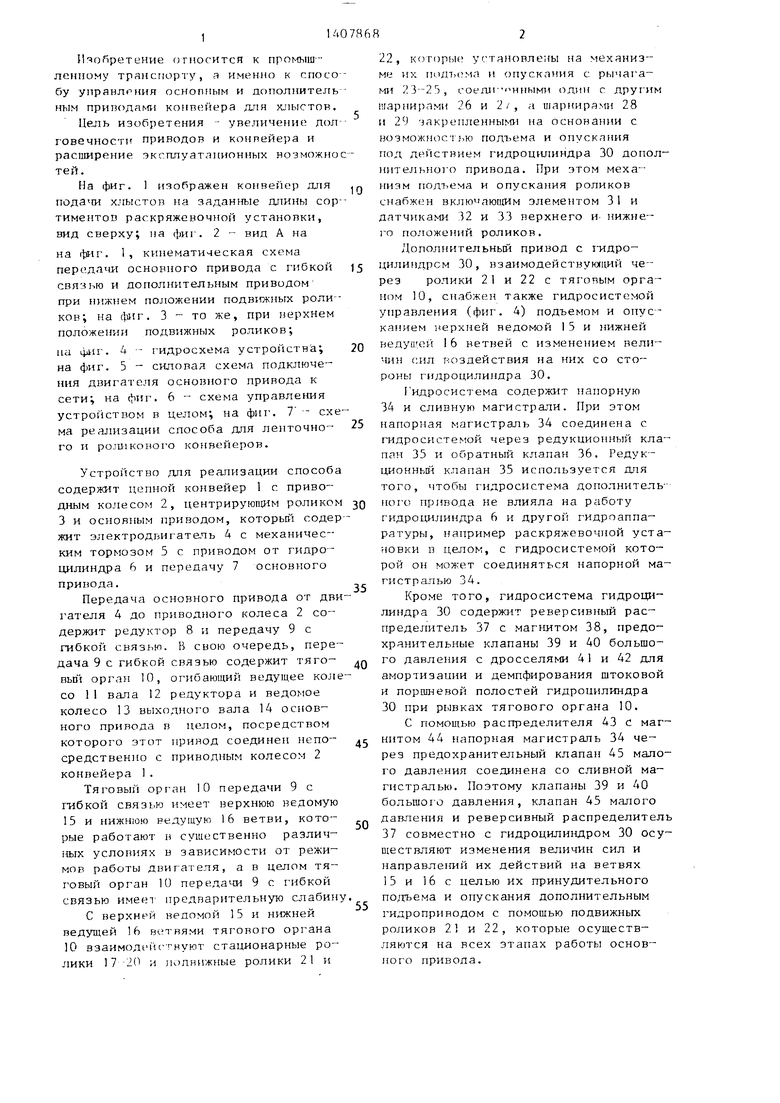
Изобретение относится к промышленному транспорту. Цель изобре тения - увеличение долговечности приводов и конвейера и расширение эксплуатационных возможностей. При разгоне конвейера гидроцилиндр (ГП) 30 дополнительного привода работает на опускание роликов 21 и 22. Ролик 22 опускает нижнюю ведущую ветвь (В) НидА 11 16 и поднимает верхнюю ведомую В 15, при этом В 15, 16 перемещаются в поперечном тяговому органу направлении, Это приводит к одновременному удлинению В 16 и укорачиванию В 15. Затем включают двигатель основного при- вода (ДОП) на режим с уменьшенным крутящимся моментом. При этом ДОП в процессе выбора слабины В 16 разгоняется. При подходе на большой скорости к заданной позиции останова производят торможение конвейера. При этом включение ДОП в режим торможения и последующее его отключение производят после поворота колеса 13 в обратном прямому его вращению направлении путем одновременного удпи- нения В 15 и укорачивания В 16 посредством включения ГЦ 30 на подъем. После-отключения ДОП к нему прикладывают тормозной момент и на пониженной скорости с максимальным усилием ГЦ 30 работает на опускание, при этом ролик 22 укорачиъает В 15 и удлиняет В 16. 7 ил. (Л НидА ,П ч 00 Од 00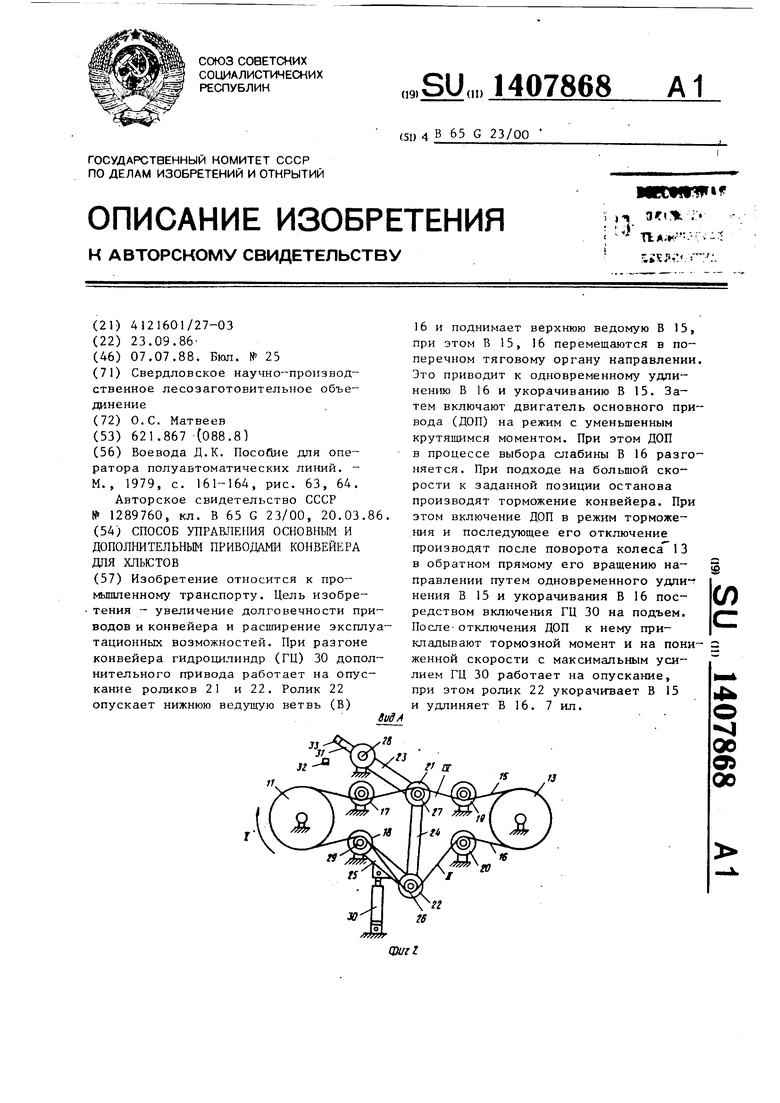
цепям через ограничитель 53 его двига-20 усилием не может поднять ее выше
тельного момента, например, содержащий ограничительные сопротивления, вентили и т.д., и через щунткрую- щий их пускатель 54. Двигатель 4 также подсоединен к цепи 55 постоянного тока пускателем 56 динамического торможения.
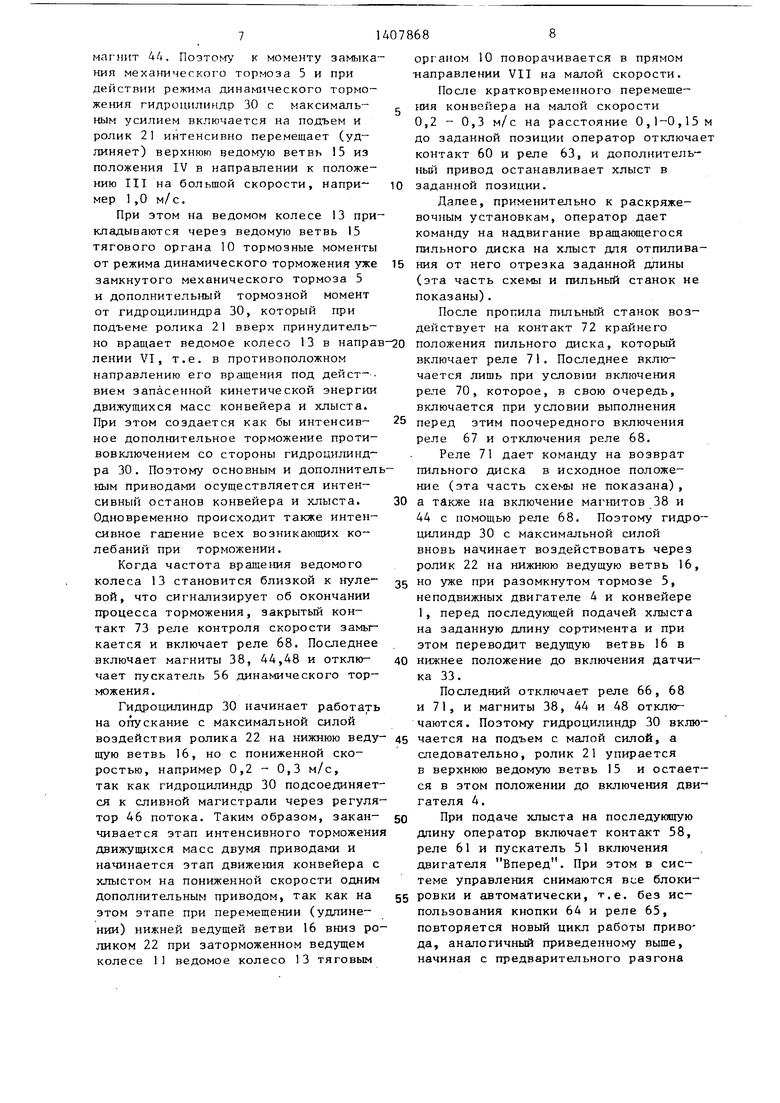
Схема управления устройством (фиг.6) содержит переключатель 57 режимов работы двигателя с контактами
58-60 и выходными реле 61-63 переключателя, соответствующими работе основного и дополнительного приводов Вперед, Назад, Торможение и малая скорость, кнопку 64 Начало работы, промежуточные реле 65-68, реле 69 времени, промежуточные реле 70 и 71, контакт 72 крайнего положения пильного диска и контакт 73 реле контроля скорости, которое установлено на выходном валу 14 привода .
Способ осуществляют следующим образом.
Перед началом работы оператор кратковременно нажимает кнопку 64 Начало работы и включает реле 65, которое включает магниты 38 и 44. Поэтому гидроцилиндр 30 работает на опускание роликов 21 и 22 к развивает при этом максимальное усилие, например 20000 - 25000 Н. При этом ролик 22 принудительно опускает нижнюю ветвь 16, например, из положения I в положение TI, а верхняя ветвь 15 при этом переходит из положения III в положение IV, т.е. обе ветви 15 и 16 перемещаются в попереч
этого положения. Поэтому, несмотря на включение гидроцилиндра 30 на подъем с малой силой, ветви 15 и 16 остаются в тех же положениях
II и IV.
При работе раскряжевочной установки оператор оценивает лесоматериал для подачи на заданную длину сортимента и включает контактом 58
реле 61. Последнее при условии включения датчика 33 включает пyckaтe.ль 51 и реле 69 времени. При этом двигатель 4 включается в направлении V при отключенном пускателе 54, т.е.
он работает на искусственной характеристикес уменьшенным в 2-3 или более раза крутящим моментом.
После включения двигатель 4 выбирает слабину нижней ведущей ветви
16, находящейся в положении II. При выборе слабины ведущая ветвь 16 под действием двигателя 4 поднимает ролик 22 и весь механизм их подъема с рычагами 23 - 25 совместно с гидроцилиндром 30, включенным также на подьем с малой силой. С выдержкой времени включается реле 69 времени, которое включает пускатель 54, поэтому двигатель 4 переходит на естественную характеристику.
Работая уже на естественной характеристике, двигатель 4 при неподвижном конвейере 1 с хлыстом продолжает выбирать слабину, т.е. укорачивать
нижнюю ведущую ветвь 16, поднимая ее до положения I. На этом этапе, когда вигатель 4 работает в режиме, близком к режиму холостого хода, он разгоняется при неподвижном конвейере
1 и хлысте до сверхноминальнор часто ты вращения и продолжает выбирать слабину до положения I нижней ведущей ветни 6.
В этом положении включается дат- чик 32, который включает реле 66. Последнее вновь включает магнит 38, и гидроцилиндр 30 включается на опускание роликов 21 и 22 с малой силой, ко, так как при этом ролик 22, упираясь в натянутую нижнюю ведуагую ветвь 16, не может фактически опуститься, ветви 15 и 16 остаются в
прежних положениях III и I. От подъе- -|g через предохранительный клапан 40.
ма ролики защищает обратный клапан.
Процесс выбора слабины в ведущей ветви 16 заканчивается, и начинается этан выравнивания угловых частот вращения ведущего колеса 11 вала 12 редуктора и ведомого колеса 13 выходного вала 14 основного привода в целом которые соответственно кинематически через редуктор 8 соединены с двигателем 4 и приводным колесом 2 цепного конвейера 1.
На этапе выравнивания двигатель 4 уменьшает свою частоту вращения, а приводное колеса 2 увеличивает. При этом в процессе уменьшения частоты вращения осуществляется приращение дзигсятельно мощности в зависимости от величин статического момента и момента инерции разгоняемой систеьм конвейера и хлыста. То есть в случае когда осуществляется, например, разгон хлыста с меньщими массами в условиях пониженного коэффициента трения конвейера, приращение двигательной мощности уменьщается, а при уве;п-1чении этих параметров - увеличивается. Поэтому на наиболее Вгэж- пом при разгоне этапе выравнивания, лрод(ыжителы1ость которого в наибольшей степени влияет на величину средней скорости разгона, осуществ- гяется автоматическое саморегулирова ie приращения двигательной мощности на этапе выравнивания.
Наряду с улучшением режима работы двигателя, это приводит к уменьшению динамических нагрузок и т.д. Однако при разгоне системы с параметрами, близкими к максимальным, приращение двигательной мощности может иметь повьш1енпую величину, что может привести в Koinie этапа выравнивания к рывку тягового органа. 10 повьшен- ной величины. .Тпя тог О, чтобы это
исключи п, предусмотрено верхнее положение ролика 22 при разгоне двиг-а теля А не выше задаваемот-о положением датчика 32, т.е. с некоторым запас ом хода поршня вверх. Поэтому при рывке нижней ведущей ветви 16 Biiepx вытесняемая из штОковой полос- 1 и гидроцилиндра 30 жидкость при вк.г1юченнном магните 38 закрывает обратный клапан 36 и вытесняется далее вначале через дроссель 38 с плав- tihiM нарастанием давления, а затем при- его значительном возрастании При этом-осуществляется интенсивная амортизация и деьшфирование.
После выравнивания частот вращения осуществляется этап окончательHoi O разгона, на котором двигатель 4 и пpивoдf oe колесо 2 увеличивают свою частоту вращения до установившейся скорости, например 2,0 м/с. IJa этой скорости через взаимодействие нижней ведущей ветви 16 и ролика 22 также осуществляется интенсивная амортизация и демпфирование колебаний в приводе.
1ри подходе на большой скорости
к заданной позиции останова оператор отключает контакт 58 Вперед и реле 6 1 и включает контакт 60 Торможение и малая скорость и реле 63. При этом отключается ггускатель 5 и
включается пускатель 56 динамического торможения. Кроме того, реле 63 включает магнит 50 гидроцилиндра 6 тормоза 5 на ei O замыкание, подготавливает цепи реле 67 и 68 и отключает
реле 66.
На этапе торможения наиболее быстро начинает действовать режим динамического торможения. Поэтому ведущее колесо I1 интенсивно уменьшает
СБОЮ частоту вращения, а ведомое колесо 13 за счет большой запасенной кинетической энергии поступательно движ тцихся масс хлыста и конвейера продолжает вращаться с практически
прежней частотой вращения. Поэтому при торможении ведущей становится кратковременно верхняя ведомая ветвь 15, которая под действием ведомого колеса 13 интенсивно натягивается
и перебрасывается из положения III в положение IV совместно с роликами 21 и 22, где вновь включается датчик 33. Последний отключает реле 66 и включает реле 67, которое включает
7
магнит 44. Поэтому к моменту замыкания механического тормоза 5 и при действии режима динамического торможения гидроцилиндр 30 с максимальным усилием включается на подъем и ролик 21 интенсивно перемещает (удлиняет) верхнюю ведомую ветвь 15 из положения IV в направлении к положению III на большой скорости, например 1,0 м/с.
При этом на ведомом колесе 13 прикладываются через ведомую ветвь 15 тягового органа 10 тормозные моменты от режима динамического торможения уже замкнутого механического тормоза 5 и дополнительный тормозной момент от гидроцилиндра 30, который при подъеме ролика 21 вверх принудитель
но вращает ведомое колесо 13 в направ-20 положения пильного диска, который
лении VI, т.е. в противоположном направлению его вращения под деист- . вием запасенной кинетической энергии движущихся масс конвейера и хлыста. При этом создается как бы интенсивное дополнительное торможение проти- вовключением со стороны гидроцилиндра 30. Поэтому основным и дополнителным приводами осуществляется интенсивный останов конвейера и хлыста. Одновременно происходит также интенсивное гапение всех возникающих колебаний при торможении.
Когда частота вращения ведомого
колеса 13 становится близкой к нуле- gg но уже при разомкнутом тормозе 5,
вой, что сигнализирует об окончании процесса торможения, закрытый контакт 73 реле контроля скорости замыкается и включает реле 68. Последнее включает магниты 38, 44,48 и отключает пускатель 56 динамического торможения.
Гидроцилиндр 30 начинает работать на опускание с Максимальной силой
неподвижных двигателе 4 и конвейер 1, перед последующей подачей хлыст на заданную длину сортимента и при этом переводит ведущую ветвь 16 в 40 нижнее положение до включения датч ка 33.
Последний отключает реле 66, 68 и 71, и магниты 38, 44 и 48 отключаются. Поэтому гидроцилиндр 30 вк
воздействия ролика 22 на нижнюю веду- 45 чается на подъем с малой силой, а щую ветвь 16, но с пониженной ско- следовательно, ролик 21 упирается
ростью, например 0,2 - 0,3 м/с, так как гидроцилиндр 30 подсоединяется к сливной магистрали через регулятор 46 потока. Таким образом, заканчивается этап интенсивного торможения движущихся масс двумя приводами и начинается этап движения конвейера с хлыстом на пониженной скорости одним дополнительным приводом, так как на этом этапе при перемещении (удлинении) нижней ведущей ветви 16 вниз роликом 22 при заторможенном ведущем колесе 11 ведомое колесо 13 тяговым
в верхнюю ведомую ветвь 15 и оста ся в этом положении до включения д гателя 4.
50 При подаче хлыста на последующу длину оператор включает контакт 58 реле 61 и пускатель 51 включения двигателя Вперед. При этом в сис теме управления снимаются вс;е блок
55 ровки и автоматически, т.е. без ис пользования кнопки 64 и реле 65, повторяется новый цикл работы прив да, аналогичный приведенному выше, начиная с предварительного разгона
органом 10 поворачивается в прямом направлении VII на малой скорости.
После кратковременного перемеше- кия конвейера на малой скорости
0,2 - 0,3 м/с на расстояние 0,1-0,15м до заданной позиции оператор отключает контакт 60 и реле 63, и дополнительный привод останавливает хлыст в заданной позиции.
Далее, применительно к раскряжевочным установкам, оператор дает команду на надвигание вращающегося пильного диска на хлыст для отпилива- ния от него отрезка заданной длины (эта ч-асть схемы и пильный станок не показаны).
После пропила шшьный станок воздействует на контакт 72 крайнего
включает реле 71. Последнее включается лищь при условии включения реле 70, которое, в свою очередь, включается при условии выполнения
перед этим поочередного включения реле 67 и отключения реле 68.
Реле 71 дает команду на возврат пильного диска в исходное положение (эта часть схемы не показана),
а также на включение магнитов 38 и 44 с помощью реле 68. Поэтому гидро- цилиндр 30 с максимальной силой вновь начинает воздействовать через ролик 22 на нижнюю ведущую ветвь 16,
неподвижных двигателе 4 и конвейере 1, перед последующей подачей хлыста на заданную длину сортимента и при этом переводит ведущую ветвь 16 в нижнее положение до включения датчика 33.
Последний отключает реле 66, 68 и 71, и магниты 38, 44 и 48 отключаются. Поэтому гидроцилиндр 30 вклюв верхнюю ведомую ветвь 15 и остается в этом положении до включения двигателя 4.
При подаче хлыста на последующую длину оператор включает контакт 58, реле 61 и пускатель 51 включения двигателя Вперед. При этом в системе управления снимаются вс;е блокировки и автоматически, т.е. без использования кнопки 64 и реле 65, повторяется новый цикл работы привода, аналогичный приведенному выше, начиная с предварительного разгона
привода в режиме, близком к режиму холостого хода, при неподвижном конвейере 1 и хлысте и т.д.
Способ может быть также реализован (фиг. 7) на другом цикловом оборудовании, а именно ленточном и роликовом конвейерах.
Формула изобретения
Способ управления основным и дополнительным приводами конвейера для хлыстов, заключающийся в ослаблении натяжения ведущей ветви огибающего ведущие и ведомые колеса тягового органа прч разгоне конвейера дополнительным приводом, включении
основного привода на режим с уменьщен-20 а, при этом после отключения основным крутящим моментом и разгоне его в процессе выбора им слабины ведущей ветви тягового органа, во включении основного привода в режиме тор-може- ния и натяжен.::: дополнительным при- п
де/
водом ведомой ветви тягового органа при торможении конвейера, отличающийся тем, что, с целью увеличения долговечности приводов и конвейера, ослабление и натяжение ведущей и ведомой ветвей тягового органа осуществляют путем одновременного их удлинения и укорачивания за счет их перемещения в поперечном тяговрму органу направлении, причем при торможении конвейера включение основного привода в режим торможения и последующее его отключение производят после поворота ведомого колеса в обратном прямому его вращению направле1даи путем одновременного удлинения ведомой и укорачивания ведущей ветвей тягового органого привода к нему прикладывают тормозной момент и на пониженной скорости и с максимальным усилием укора швают ведомую ветвь и удли- няют ведущую ветвь тягового органа.
Вид А
11
13
фиг4
r y v v v j I
5A
5J
фиг. 5
9-I-T
5l S9 BO
63
Vvjj
л.. J J j
W zXTN ЛЮ
4- 5Л ,x
TV r
Ai Ф
« /
S4
Т J Л Л ГГТ Л
68
71
ffJ
ff
Г
л.. J J j
c7
X,
W zXTN Л
TV r
Ai Ф
фиг. 6
gr
9фиг. 7
| Воевода Д.К | |||
| ПосоОие для оператора полуавтоматических линий | |||
| - М | |||
| , 1979, с | |||
| Вага для выталкивания костылей из шпал | 1920 |
|
SU161A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Способ управления приводом тягового органа | 1985 |
|
SU1289760A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
