Изобретение относится к машиностроению.
Целью изобретения является сокращение мощности электродвигателей за счет их последовательной работы в генераторном режиме.
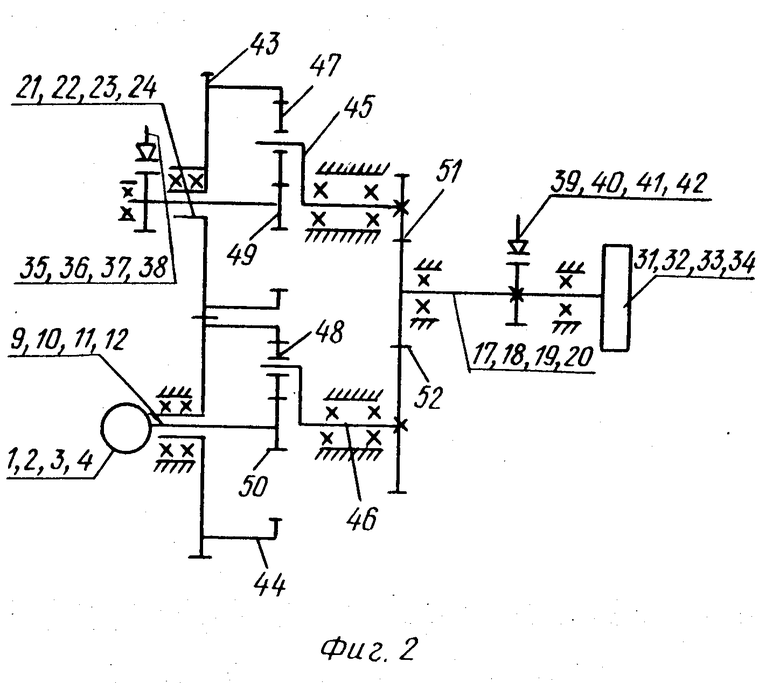
На фиг. 1 изображена схема электромеханического привода для четырех исполнительных органов; на фиг. 2 - кинематическая схема дифференциала.
Электромеханический привод исполнительных органов содержит электродвигатели 1-4, дифференциалы 5-8 с входными валами 9-12, двумя выходными валами 13-16 и 17-20 и дополнительными выходными валами 21-24. Входные валы 9-12 соединены соответственно с электродвигателями 1-4. Выходные валы 13-16 связаны между собой и с исполнительным органом 25 кинематической цепью 26 с коническими колесами 27-30. Выходные валы 17-20 связаны с исполнительными органами 31-34. Выходные валы 21-24 и 17-20 снабжены тормозами 35-38 и 39-42 соответственно.
Каждый из дифференциалов 5-8 включает два соединенных наружными зубчатыми венцами центральных колеса с внутренними зубьями 43 и 44, два водила 45 и 46 с сателлитами 47 и 48, два центральных колеса с внешними зубьями 49 и 50 на входных валах 9-12, соединенных с электродвигателями 1-4, и дополнительных выходных валах 21-24, соединенных с тормозами 35-38. Водила 45 и 46 через зубчатые передачи 51 и 52 соединены с выходными валами 17-20 с тормозами 39-42 и исполнительными органами 31-34.
Применительно к оборудованию сучкорезно-раскряжевочной линии установлены следующие исполнительные (рабочие) органы: пильный диск 25, подающий транспортер 31, прижимной ролик 32, сучкорезные ножи 33, пильная рамка 34.
Электромеханический привод работает следующим образом. Первоначально приводится во вращение пильный диск (исполнительный орган 25). Для этого при замкнутых тормозах 39-42 и открытых тормозах 35-38 включаются электродвигатели 1-4, вращение от которых через центральное колесо 49 с внешними зубьями, сателлиты 47 передается центральными колесам 43, которые передают вращение выходным валам 13-16 и через конические колеса 27-30, кинематическую цепь 26 - исполнительному органу 25, т.е. пуск пилы осуществляется с использованием всей установленной мощности привода (в дальнейшем пила вращается постоянно).
Далее в работу включается подающий транспортер (исполнительный орган 31). Для этого двигатель 1 выключают, тормоз 39 открывают, тормоз 35 замыкают. Вращение от двигателей 2-4 через кинематическую цепь 26, коническую передачу 27, выходной вал 13 передается центральному колесу 43 с внутренними зубьями дифференциала 5. Дополнительный выходной вал 21 с центральным колесом 49 оставлен тормозом 35. Крутящий момент от центрального колеса 43 через сателлиты 47 передается водилу 45 через передачу 51 выходному валу 17 и исполнительному органу - транспортеру 31. При этом водило 46 и центральное колесо 44 вращаются в противоположные стороны, поэтому и скорость вращения центрального колеса 50 и связанный с ним ротор электродвигателя 1 имеет повышенную скорость вращения, что способствует его более интенсивному охлаждению.
Для остановки транспортера тормоз 39 замыкают, реле 35 открывают, включают электродвигатель 1, который выходит на номинальные обороты с повышенных оборотов, т.е. в генераторном режиме, при котором крутящий момент на солнечной шестерне 50 выше, чем пусковой момент электродвигателя 1.
Таким образом, в предложенном приводе по сравнению с прототипом мощность электродвигателя 1 может быть в 1,8-2,2 раза меньше за счет того, что крутящий момент в генераторном режиме примерно в 2 раза выше, чем в двигательном, и за счет более интенсивного охлаждения электродвигателя в период работы транспортера.
Работа остальных исполнительных органов осуществляется аналогичным образом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ | 1989 |
|
SU1619810A2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ | 1984 |
|
SU1441871A1 |
| Электромеханический привод исполнительных органов | 1988 |
|
SU1588960A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД | 1986 |
|
SU1498114A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ | 1989 |
|
RU1619812C |
| Раскряжевочный станок К.К.Романова | 1987 |
|
SU1445960A1 |
| Приводной механизм с переключением передачи | 2018 |
|
RU2675753C1 |
| Манипулятор | 1979 |
|
SU831615A1 |
| ПРИВОД ПОВОРОТНОГО ЗАПОРНОГО ОРГАНА ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2001 |
|
RU2190144C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЗАПОРНО-РЕГУЛИРУЮЩИМ ОРГАНОМ ТРУБОПРОВОДНОЙ АРМАТУРЫ И СПОСОБ НАСТРОЙКИ ЕГО ОГРАНИЧИТЕЛЯ МАКСИМАЛЬНОГО КРУТЯЩЕГО МОМЕНТА | 2005 |
|
RU2273784C1 |
Изобретение относится к машиностроению. Целью изобретения является сокращение мощности электродвигателей за счет их последовательной работы в генераторном режиме. При работе привода исполнительный орган 25 вращается постоянно, а для включения другого исполнительного органа, например 31, включают двигатель 1, открывают тормоз 39, а тормоз 35 замыкают, что приводит к ускоренному вращению ротора двигателя 1, т.е. к его работе в генераторном режиме, что облегчает его последующее включение на нагрузку. 2 ил.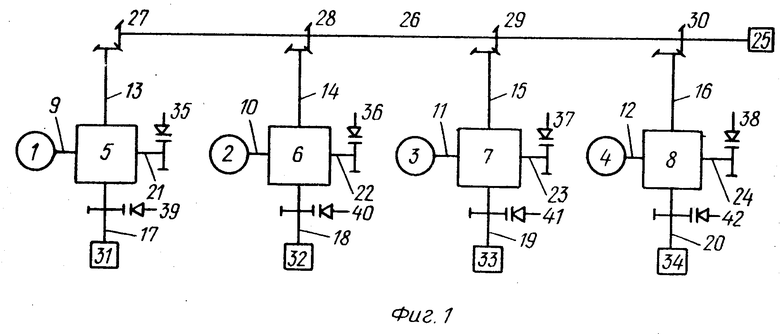
ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ, содержащий электродвигатели, тормоза и дифференциалы, у которых входные валы каждого соединены с двигателями, одни из выходных валов связаны между собой кинематической цепью, а другие предназначены для соединения через тормоза с исполнительными органами, отличающийся тем, что, с целью сокращения мощности электродвигателей, каждый из дифференциалов имеет дополнительный выходной вал, на котором установлен тормоз.
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ | 1984 |
|
SU1441871A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
