18
СП
О N9 ЬЭ 4ь О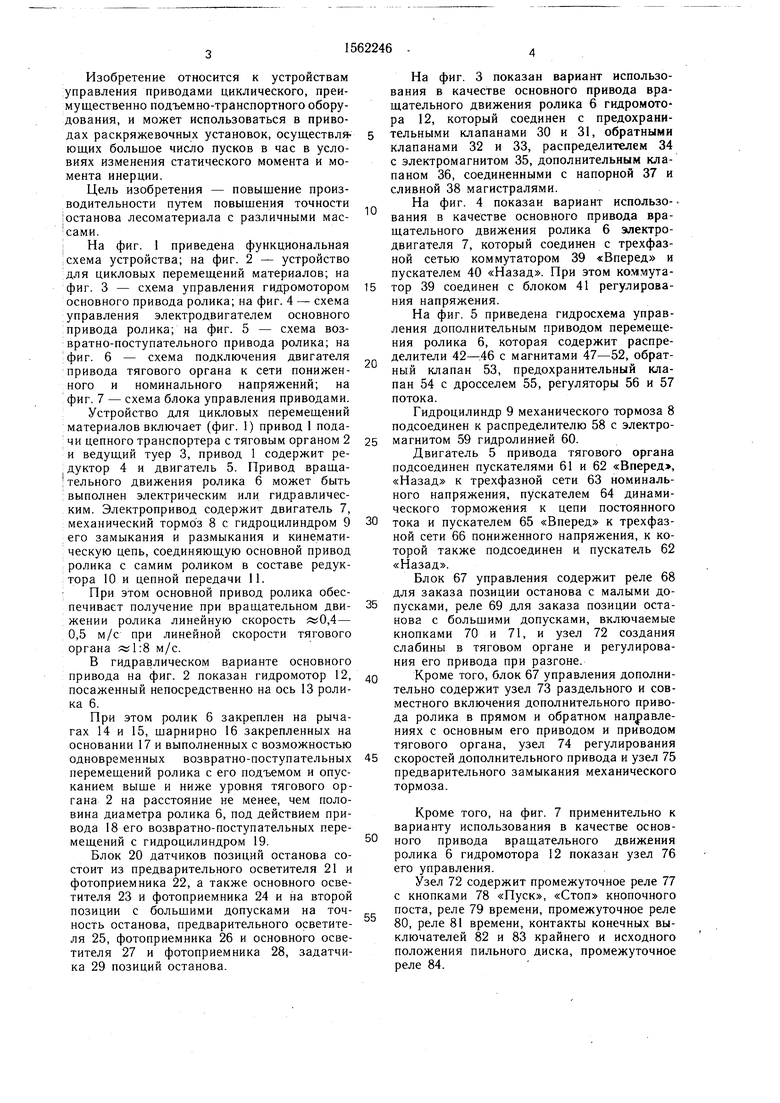

Изобретение относится к управлению приводами циклического оборудования и может быть использовано в приводах раскряжевочных установок. Цель изобретения - повышение произв-сти путем повышения точности останова лесоматериала (ЛМ) с различными массами. Устройство содержит привод 1 подачи цепного транспортера с тяговым органом, привод 7 вращательного движения наполного ролика для цикловых перемещений ЛМ и привод 18 возвратно-поступательного перемещения ролика. К входам всех приводов подсоединены выходы блока управления приводами, входы которого соединены с блоком 20 датчиков и задатчиком 29 позиций останова ЛМ. К входам приводов 1 и 7 подключен блок 41 регулирования напряжения. Возвратно-поступательное перемещение ролика позволяет вводить и выводить его из зацепления с ЛМ в зависимости от режимов работы привода (разгон, торможение). При этом в режиме разгона ролик вращается в ту же сторону, что и движется ЛМ с помощью привода 1. В установившемся режиме ролик выходит из зацепления, а в режиме торможения привод 7 ролика переходит в генераторный режим, чем и обеспечивается точность останова ЛМ. 7 ил.
Фиг.1
Изобретение относится к устройствам управления приводами циклического, преимущественно подъемно-транспортного оборудования, и может использоваться в приводах раскряжевочных установок, осуществля ющих большое число пусков в час в условиях изменения статического момента и момента инерции.
Цель изобретения - повышение производительности путем повышения точности останова лесоматериала с различными массами.
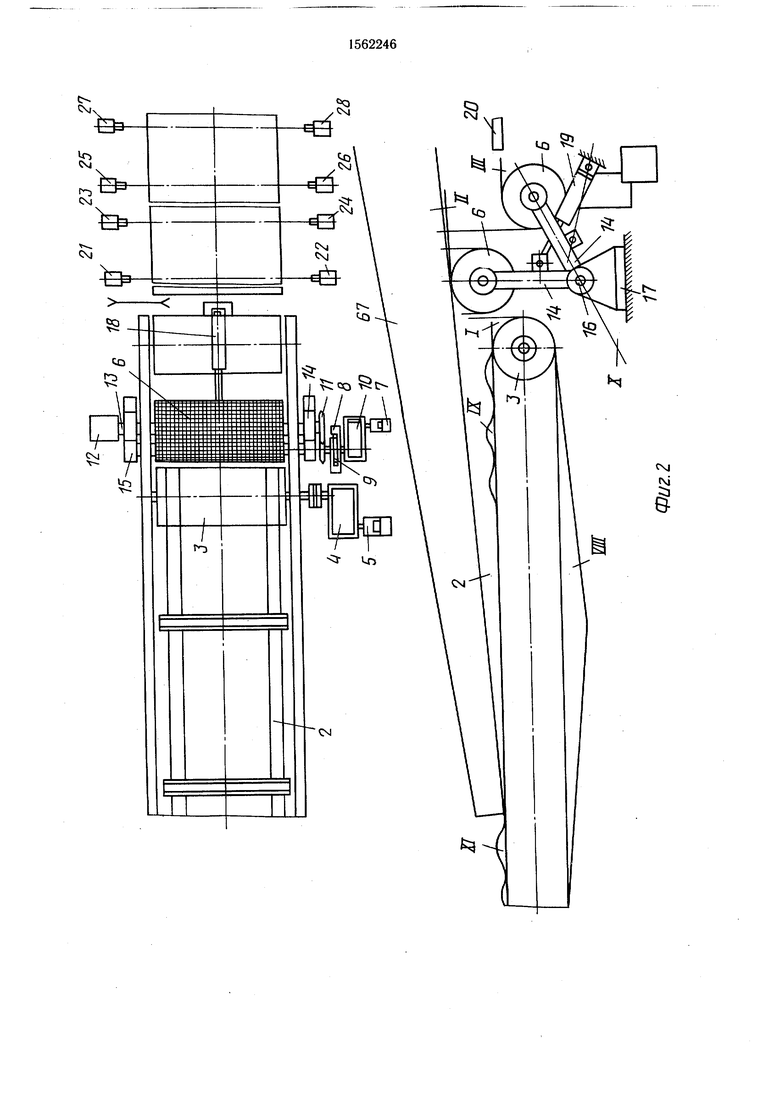
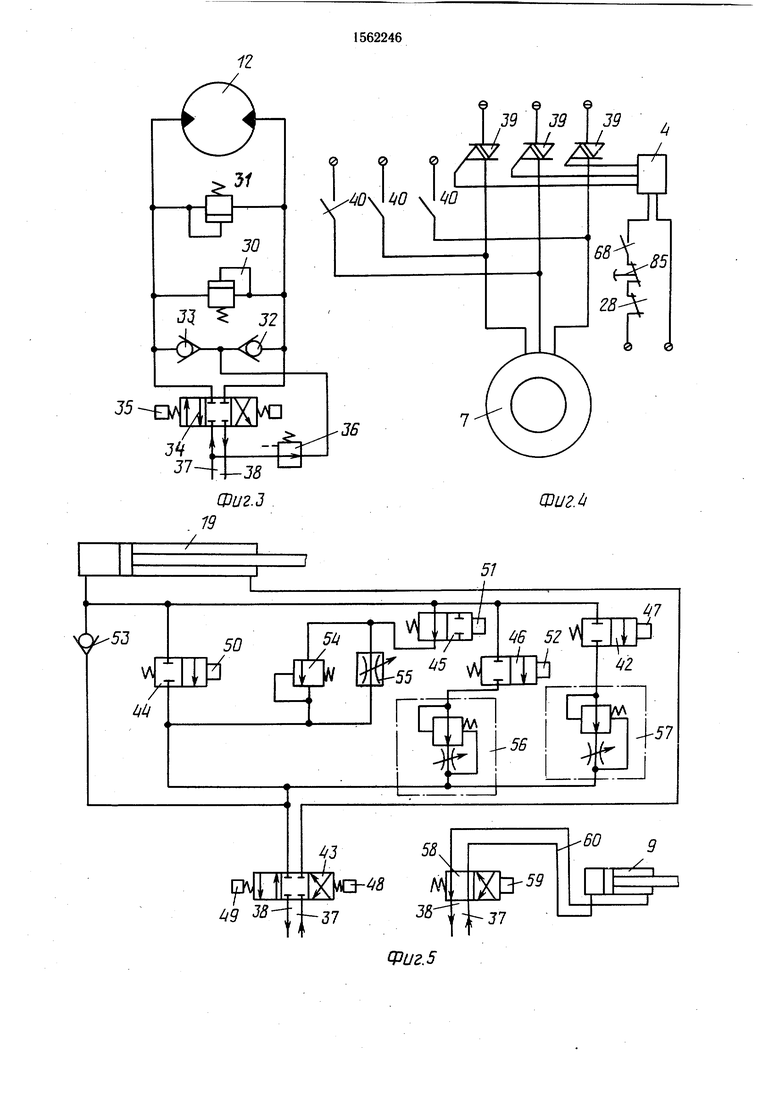
На фиг. 1 приведена функциональная схема устройства; на фиг. 2 - устройство для цикловых перемещений материалов; на фиг. 3 - схема управления гидромотором основного привода ролика; на фиг. 4 - схема управления электродвигателем основного привода ролика; на фиг. 5 - схема возвратно-поступательного привода ролика; на фиг. 6 - схема подключения двигателя привода тягового органа к сети пониженного и номинального напряжений; на фиг. 7 - схема блока управления приводами.
Устройство для цикловых перемещений материалов включает (фиг. 1) привод 1 подачи цепного транспортера с тяговым органом 2 и ведущий туер 3, привод 1 содержит редуктор 4 и двигатель 5. Привод враща- тельного движения ролика 6 может быть выполнен электрическим или гидравлическим. Электропривод содержит двигатель 7, механический тормоз 8 с гидроцилиндром 9 его замыкания и размыкания и кинематическую цепь, соединяющую основной привод ролика с самим роликом в составе редуктора 10 и цепной передачи 11.
При этом основной привод ролика обеспечивает получение при вращательном дви- жении ролика линейную скорость «0,4- 0,5 м/с при линейной скорости тягового органа «1:8 м/с.
В гидравлическом варианте основного привода на фиг. 2 показан гидромотор 12, посаженный непосредственно на ось 13 ролика 6.
При этом ролик 6 закреплен на рычагах 14 и 15, шарнирно 16 закрепленных на основании 17 и выполненных с возможностью одновременных возвратно-поступательных перемещений ролика с его подъемом и опусканием выше и ниже уровня тягового органа 2 на расстояние не менее, чем половина диаметра ролика 6, под действием привода 18 его возвратно-поступательных перемещений с гидроцилиндром 19.
Блок 20 датчиков позиций останова состоит из предварительного осветителя 21 и фотоприемника 22, а также основного осветителя 23 и фотоприемника 24 и на второй позиции с большими допусками на точность останова, предварительного осветителя 25, фотоприемника 26 и основного осветителя 27 и фотоприемника 28, задатчи- ка 29 позиций останова.
0
5 0
5
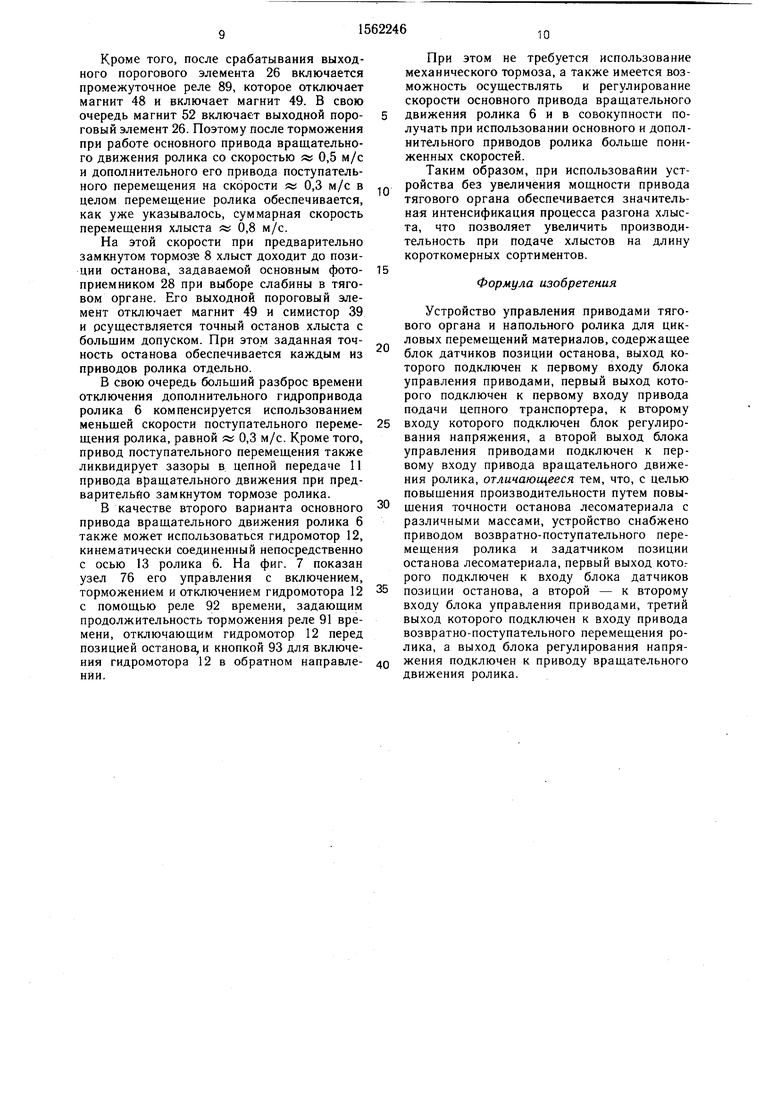
На фиг. 3 показан вариант использования в качестве основного привода вращательного движения ролика 6 гидромото ра 12, который соединен с предохранительными клапанами 30 и 31, обратными клапанами 32 и 33, распределителем 34 с электромагнитом 35, дополнительным клапаном 36, соединенными с напорной 37 и сливной 38 магистралями.
На фиг. 4 показан вариант использо- вания в качестве основного привода вращательного движения ролика 6 электродвигателя 7, который соединен с трехфазной сетью коммутатором 39 «Вперед и пускателем 40 «Назад. При этом коммутатор 39 соединен с блоком 41 регулирования напряжения.
На фиг. 5 приведена гидросхема управления дополнительным приводом перемещения ролика 6, которая содержит распределители 42-46 с магнитами 47-52, обратный клапан 53, предохранительный клапан 54 с дросселем 55, регуляторы 56 и 57 потока.
Гидроцилиндр 9 механического тормоза 8 подсоединен к распределителю 58 с электромагнитом 59 гидролинией 60.
Двигатель 5 привода тягового органа подсоединен пускателями 61 и 62 «Вперед, «Назад к трехфазной сети 63 номинального напряжения, пускателем 64 динамического торможения к цепи постоянного тока и пускателем 65 «Вперед к трехфазной сети 66 пониженного напряжения, к которой также подсоединен и пускатель 62 «Назад.
Блок 67 управления содержит реле 68 для заказа позиции останова с малыми допусками, реле 69 для заказа позиции останова с большими допусками, включаемые кнопками 70 и 71, и узел 72 создания слабины в тяговом органе и регулирования его привода при разгоне.
Кроме того, блок 67 управления дополнительно содержит узел 73 раздельного и совместного включения дополнительного привода ролика в прямом и обратном направлениях с основным его приводом и приводом тягового органа, узел 74 регулирования скоростей дополнительного привода и узел 75 предварительного замыкания механического тормоза.
Кроме того, на фиг. 7 применительно к варианту использования в качестве основного привода вращательного движения ролика 6 гидромотора 12 показан узел 76 его управления.
Узел 72 содержит промежуточное реле 77 с кнопками 78 «Пуск, «Стоп кнопочного поста, реле 79 времени, промежуточное реле 80, реле 81 времени, контакты конечных выключателей 82 и 83 крайнего и исходного положения пильного диска, промежуточное реле 84.
Узел 73 содержит реле 85 времени, промежуточное реле 86, реле 87 и 88 времени, промежуточное реле 89 и реле 90 времени.
Узел 74 содержит схему управления распределителями 52 и 53 включения и отклю- чения регуляторов 57 и 58 потока.
Узел 75 содержит схему управления магнитом 60 гидроцилиндра 9 механического тормоза 8.
Узел 76 управления гидромотором 12 основного привода вращательного движения ролика 6 содержит реле 91 и 92 времени.
Устройство для цикловых перемещений материалов работает следующим образом.
Перед подачей материала от разгрузочной площадки до пильного станка опера- тор в узле 72 нажимает кнопку 78 «Пуск и включает промежуточное реле 77. Последнее включает реле 79 времени и пускатель 62 «Назад, подключающий двигатель 5 к трехфазной сети 66 пониженного напряжения.
Двигатель 5 привода тягового органа кратковременно включается в обратном направлении с уменьшенным двигательным моментом и создается слабина в тяговом органе 2.
При срабатывании реле 79 времени отключается пускатель 62 «Назад и включается пускатель 65 «Вперед, который подключает двигатель 5 к трехфазной сети 66 того же пониженного напряжения.
Осуществляется вначале разгон двига- теля 5 с уменьшенным двигательным моментом в режиме, близком к режиму холостого хода, при выборе слабины (фиг. 2) и при неподвижном материале, а затем после срабатывания реле 81 времени после его включения промежуточным реле 80, отключается пускатель 65 и включается пускатель 61 «Вперед, подключающий двигатель 5 к трехфазной сети 63 номинального напряжения.
Осуществляется этап выравнивания скоростей двигателя 5 и материала с регулиро- ванием привода тягового органа и далее этап окончательного разгона. При этом двигатель 5 работает с увеличенной двигательной мощностью на этапах выравнивания и окончательного разгона.
Так как при включении реле 80 также отключаются магниты 48 и 60, а включаются магниты 49 и 50, то гидроцилиндр 9 размыкает механический тормоз 8, а гидроцилиндр 18 опускает ролик 6 в крайнее нижнее положение (фиг. 2), при котором он не взаимодействует с нижней поверхностью хлыста.
Перемещение хлыста от разгрузочной площадки к пильному станку осуществляется на относительно небольшое расстояние 3-5 м, поэтому продолжительность этого этапа составляет небольшую продолжительность по отношению к полному циклу переработки всего хлыста.
Далее хлыст проходит над опущенным роликом 6 и, не касаясь его, подходит к пильному станку, где оператор нажимает кнопку 78 «Стоп аналогичного кнопочного поста и отключает реле 77, а последнее - пускатель 61 «Вперед. Осуществляется отор цовка хлыста пильным станком. После пропиливания хлыста пильный диск воздействует на конечный выключатель 82 его крайнего положения и включает промежуточное реле 84, а последнее кратковременно включает пускатель 62 «Назад до возврата пильного диска в исходное положение и включения его конечного выключателя 83. При этом двигатель 5, включаясь в обратном направлении с уменьшенным двигательным моментом, вновь создает слабину.
Одновременно реле 84 отключает магнит 49 и включает магнит 48. Ролик 6 дополнительным приводом - гидроцилиндром 18 при отключенном его основном приводе вращательного движения с электродвигателем 7; перемещаясь навстречу движения материала, переходит в пол ожение выше уровня тягового уровня и при этом роликом 6 осуществляется подъем нижней передней части хлыста.
Затем оператор осуществляет автоматизированную подачу хлыста на заданную длину сортиментов. Для этого он нажимает, например, кнопку 70 и включает реле 68 заказа, соответствующего здесь первой позиции останова хлыстов с малым допуском. При этом реле 68 вначале включает пускатель 65, подключающий вновь двигатель 5 тягового органа к сети 66 пониженного напряжения, а также включает реле 85 времени. Последнее с выдержкой времени отключает пускатель 65 и включает пускатель 61. При этом двигатель 5 тягового органа вновь осуществляет этап выравнивания и окончательного разгона.
Кроме того, реле 68 подключает блок 41 регулирования напряжения. При этом симис- торы 39 подключают к трехфазной сети с номинальным напряжением двигатель 7 основного привода вращательного движения ролика 6. Одновременно реле 63 отключает магнит 48 и вновь включает магниты 49 и 50 с помощью промежуточного реле 86.
При этом осуществляется перемещение ролика 6 в направлении движения мате- .риала при включенном основном его приводе вращательного движения. Если основной привод осуществляет перемещение, например, со скоростью 0,5 м/с,а дополнительный со скоростью 0,8-1,0 м/с, то оба привода в совокупности обеспечивают разгон до скорости 1,3-1,5 м/с, т. е. практически почти до установившейся большой скорости 1,8 м/с. ;
В свою, очередь, в процессе разгона привод с двигателем 5, в начале работает с пониженным двигательным моментом и выполняет при этом вспомогательную роль, а
затем после включения реле 85 времени, двигатель 5 начинает работать с номинальным двигательным моментом и окончательно разгоняет тяговый орган и материал до установившейся большой скорости 1,8 м/с после отключения пускателя 65 и включения пускателя 61. При этом, перемещаясь в прямом направлении, ролик 6 одновременно опускается.
Опускаясь, ролик 6 выходит из зацеп- ления с хлыстом и при этом кинематическая связь между ними разрывается, а поэтому основной и дополнительный приводы ролика 6 уже не препятствуют окончательному разгону привода тягового с двигателем 5.
Реле 68 также включает реле 87 времени. При этом привод тягового органа продолжает перемещать хлыст на установившейся большой скорости до заданной позиции останова. Перед заданной позицией срабатывает реле 87 времени, которое отключает промежуточное реле 86. Реле 87 времени отключает пускатель 61 и включает пускатель 64 динамического торможения двигателя 5 тягового органа.
После отключения реле 86 отключается магнит 49 и включается магнит 48. Поэтому гидроцилиндр 18 перемещает на указанной скорости 0,8-1,0 м/с ролик навстречу движения хлыста при включенном приводе вращательного движения ролика. Кроме того, при этом ролик 6 начинает входить в зацепление с хлыстом со все большей интен- сивностью, поднимая хлыст. В процессе встречи с хлыстом за счет наличия дросселя 55 и предохранительного клапана 54 ликвидируются ударные нагрузки в ролике.
При этом осуществляется интенсивное торможение хлыста за счет встречного перемещения относительно его ролика 6. Кроме того, при встречном перемещении ролика 6 при включенном двигателе 7 в результате его взаимодействия с хлыстом при движении ролика навстречу движению хлыс- та, ролик 6 дополнительно разгоняется и поэтому двигатель 7 переходит в режим интенсивного рекуперативного торможения.
В конце интенсивного торможения хлыста роликом 6 он затемняет предварительный фотоприемник 22, выходной пороге- вый элемент которого включает реле 90 времени. Кроме того, отключается пускатель 64 динамического торможения и через реле 89 электромагнит 48 включает распределитель 43. Электромагнит 47 подключает распределитель 42, который обеспечивает по- лучение пониженной скорости например 0,3 м/с, а также магнит 59, дающий команду на замыкание тормоза 8.
После снижения скорости материала до 0,7-0,8 м/с осуществляется одновременное перемещение материала основным приводом вращательного движения на скорости «0,5 м/с и дополнительным приводом поступательного перемещения ролика 6 « 0,3 м/с,
т. е. при работе двух приводов обеспечивается при использовании третьего вида перемещений ролика в направлении IV суммарная скорость « 0,8 м/с.
После срабатывания реле 90 времени отключается магнит 52 и включается магнит 47. При этом подключается вместо регулятора 56 потока регулятор 57 потока, обеспечивающий скорость перемещения вместо 0,3 м/с лишь скорость « 0,1 м/с. Кроме того, реле 85 времени отключает и двигатель 7 основного привода вращательного движения ролика при уже замкнутом его механическом тормозе 8.
При этом в ходе поступательного перемещения в направлении движения материала ролик 6 при взаимодействии с хлыстом разворачивается во встречном направлении и при этом цепная передача 11 натягивается и ликвидируются зазоры в этой кинематической цепи. Кроме того, при перемещении хлыстов повышенных масс при остановленном цепном тяговом органе 2 это перемещение обеспечивается в процессе выбора основной или дополнительной слабины, возникающей в процессе торможения хлыста роликом и при его перемещении.
Перемещение на скорости « 0,8 м/с осуществляется в среднем на 15-20 см, а доводка на скорости « 0,1 м/с проводится на расстояние 3-5 см. При этом осуществляется перемещение ролика, при котором в еще большей степени достигается выбор свободных ходов в передаче 11 при предварительно замкнутом тормозе 8.
После перемещения ролика 6 на 3-5 см до основного фотоприемника на скорости 0,1 м/с, где его выходной пороговый элемент 24 отключает магниты 47 и 49. Осуществляется точный останов хлыста в первой позиции с малым допуском от -f-1 до ±2 см и при этом выбирается и сохраняется натяг в цепной передаче 11.
После останова хлыста в заданной позиции дается команда на надвигание пильного диска на хлыст. После пропиливания хлыста пильный диск вновь воздействует на конечный выключатель 82 его крайнего положения, который отключает реле заказа. Кроме того, после сброса отключаются пороговые элементы фотоприемников, и схема вновь готова к следующему заказу.
При заказе второй позиции останова с большим допуском, например 7-10 см, оператор при подаче хлыста на заданную длину нажимает кнопку 71 заказа и включает реле 69 заказа. После его включения осуществляются аналогичные операции, что и при включении реле 68 заказа.
Отличием является то, что реле 69 заказа включает не реле 87 времени, а реле 88 времени, которое дает команду на перевод ролика для торможения и при этом вновь включаются пускатель 64 динамического торможения после отключения пускателя 61.
Кроме того, после срабатывания выходного порогового элемента 26 включается промежуточное реле 89, которое отключает магнит 48 и включает магнит 49. В свою очередь магнит 52 включает выходной поро- говый элемент 26. Поэтому после торможения при работе основного привода вращательного движения ролика со скоростью « 0,5 м/с и дополнительного его привода поступательного перемещения на скорости « 0,3 м/с в целом перемещение ролика обеспечивается, как уже указывалось, суммарная скорость перемещения хлыста « 0,8 м/с.
На этой скорости при предварительно замкнутом тормозе 8 хлыст доходит до позиции останова, задаваемой основным фото- приемником 28 при выборе слабины в тяговом органе. Его выходной пороговый элемент отключает магнит 49 и симистор 39 и осуществляется точный останов хлыста с большим допуском. При этом заданная точность останова обеспечивается каждым из приводов ролика отдельно.
В свою очередь больший разброс времени отключения дополнительного гидропривода ролика 6 компенсируется использованием меньшей скорости поступательного переме- щения ролика, равной « 0,3 м/с. Кроме того, привод поступательного перемещения также ликвидирует зазоры в цепной передаче 11 привода вращательного движения при предварительно замкнутом тормозе ролика.
В качестве второго варианта основного привода вращательного движения ролика 6 также может использоваться гидромотор 12, кинематически соединенный непосредственно с осью 13 ролика 6. На фиг. 7 показан узел 76 его управления с включением, торможением и отключением гидромотора 12 с помощью реле 92 времени, задающим продолжительность торможения реле 91 времени, отключающим гидромотор 12 перед позицией останова, и кнопкой 93 для включения гидромотора 12 в обратном направле-
НИИ.
0
Q
5
5
0 0
При этом не требуется использование механического тормоза, а также имеется возможность осуществлять и регулирование скорости основного привода вращательного движения ролика бив совокупности получать при использовании основного и дополнительного приводов ролика больше пониженных скоростей.
Таким образом, при использовании устройства без увеличения мощности привода тягового органа обеспечивается значительная интенсификация процесса разгона хлыста, что позволяет увеличить производительность при подаче хлыстов на длину короткомерных сортиментов.
Формула изобретения
Устройство управления приводами тягового органа и напольного ролика для цикловых перемещений материалов, содержащее блок датчиков позиции останова, выход которого подключен к первому входу блока управления приводами, первый выход которого подключен к первому входу привода подачи цепного транспортера, к второму входу которого подключен блок регулирования напряжения, а второй выход блока управления приводами подключен к первому входу привода вращательного движения ролика, отличающееся тем, что, с целью повышения производительности путем повышения точности останова лесоматериала с различными массами, устройство снабжено приводом возвратно-поступательного перемещения ролика и задатчиком позиции останова лесоматериала, первый выход кото.- рого подключен к входу блока датчиков позиции останова, а второй - к второму входу блока управления приводами, третий выход которого подключен к входу привода возвратно-поступательного перемещения ролика, а выход блока регулирования напряжения подключен к приводу вращательного движения ролика.
и
в
К Ъ 32
ii
k
-J-J5
J5
. J
5/7
bf
5
cff
J
IF
рСЕЖК3
-tf-37
J9 J5 J4
0.
v
Й
S
-55
5
д
5ZV
/
tf
4
$
56
ЛЛ
5
60
/
м
35
J7
.5
66
6В63
Л
55
1 Г 1 I Г 1 1 1
уб2 yfiZ уЈ2 уб7 U/ у5/ .Ј4 уЈ4 65 С$5 -55
Ф
I . I -i -IК Ц.
I (-У5
gOIXl
/-
lit
ФигЛ
55
.б
| Способ управления приводами циклового оборудования | 1984 |
|
SU1209536A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Способ управления приводом тягового органа | 1985 |
|
SU1289760A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
