Изобретение относится к автоматическому контролю и управлению процессами измельчения в шаровых мельницах и может быть использовано, главным образом, на предприятиях переработки минерального сырья.
Цель изобретения - повышение точности контроля.
/Мощность, потребляемая мельницей, выражается следующим образом:
,6- D2 5- L- v sineгде D - диаметр мельницы; L - длина;
коизжетна ого
сти
вы(1)
Q - центральный угол шаровой загрузки;
Y - степень заполнения шарами;
в - угол поворота шаровой загрузки.
Формула (1) показывает, что для мельницы с определенными размерами D и L, при данной частоте вращения барабана на величину потребляемой мощности N влияет только множитель , т.е степень заполнения
мельницы шарами у. При постоянной частоте вращения барабана величину угла в можно с достаточной для практических целей точностью считать постоянной. Тогда потребляемая мельницей мощность растет с увеличением степени заполнения ее шарами и достиCfc
to
Јь
-Jfeb
гает максимума, когда множитель sirr &максимальный, i.e. когда центральный угол, увеличиваясь с увеличением у, достигает 180°, при такой степени заполнения мощность и работа максимальны. При дальнейшем увеличении загрузки (50%) мощность, потребляемая мельницей, уменьшается. Общий закон распределения активной мощности мельницы близкий к параболическому с максимумом в точке . При наиболее распространенном покюбельном способе догрузки шаров в мельницу приращения мощности уменьшаются при приближении степени загрузки у к оптимальной.
Приращения мощности в результате изменения рудной загрузки естественным обра- ;ом в 3-10 раз меньше, чем приращения мощности в результате покюбельной догрузки шаров. На этом различии приращения мощности, а также на явлении приращения мощности в пусковой период, превышающей в свою очередь возможные реакции системы на дрчгие возмущения не менее чем в пять- десять раз, основана используемая в способе сииема селекции по положительному при- ращс-мию сигнала мощности.
V жое отрицательное приращение мощ- носги (.иидет ельствуетоб аварийном техноло- iнческом состоянии мельницы, что означает мельницы рудой до такой степени, что работа шаров (см. формулу 1) прекраща- 01ся; малыЬ отрицательные значения приращения характеризуют уменьшение текущей нагрузки на мельницу.
В порядок осуществления способа заложена также закономерность, что при шаровой нагрузке в мельнице, отличающейся от оптимальной, реакция системы на изменения рудной загрузки более значительна и прямым образом связана с величиной отклонения шаровой загр хи or оптимальной.
Перед сетекцней приращения сигнала мощности, истребляемой приводом, необходимо усреднение сигнала за оборот мельницы, так как, с одной стороны, это необходимо для сглаживания высокочастотных возмущений мощности за счет механических повреждений участков подшипниковых опор, локальных нарушений симметричности футеровки в мельнице и дефектов в механической переда- 11, с другой стороны, период оборота мельницы Т - несколько секунд - достаточное вреия для нейтрализации высокочастотных возмущении по загрузке мельницы минеральным сырьем
В счособе осуществляется суммирование сигналов мощности, потребляемой приводом, а также мощности, затрачиваемой на изменение рудной загрузки, вычисление их отношения, что позволяет более правильно определять полезную работу мельницы (не за счет работы по перемещению шаров в мельнице, а путем учета работы на измельчение минерального сырья).
Предлагаемый способ характеризуется также положительностью приращения мощности при выходе из аварийного технологически состояния (перегруз рудой), при этом
возможно искажение фиксируемых значений шаровой и рудной загрузки мельницы. Во избежание указанного нежелательного эффекта предусмотрен запрет индикации у, у при перегрузе мельницы на период Тз,
Q устанавливаемый экспериментально; кроме того, снятие запрета индикации происходит только при ограниченном «1Кз) отрицательном приращении мощности, что обеспечивает надежность и точность функционирования системы.
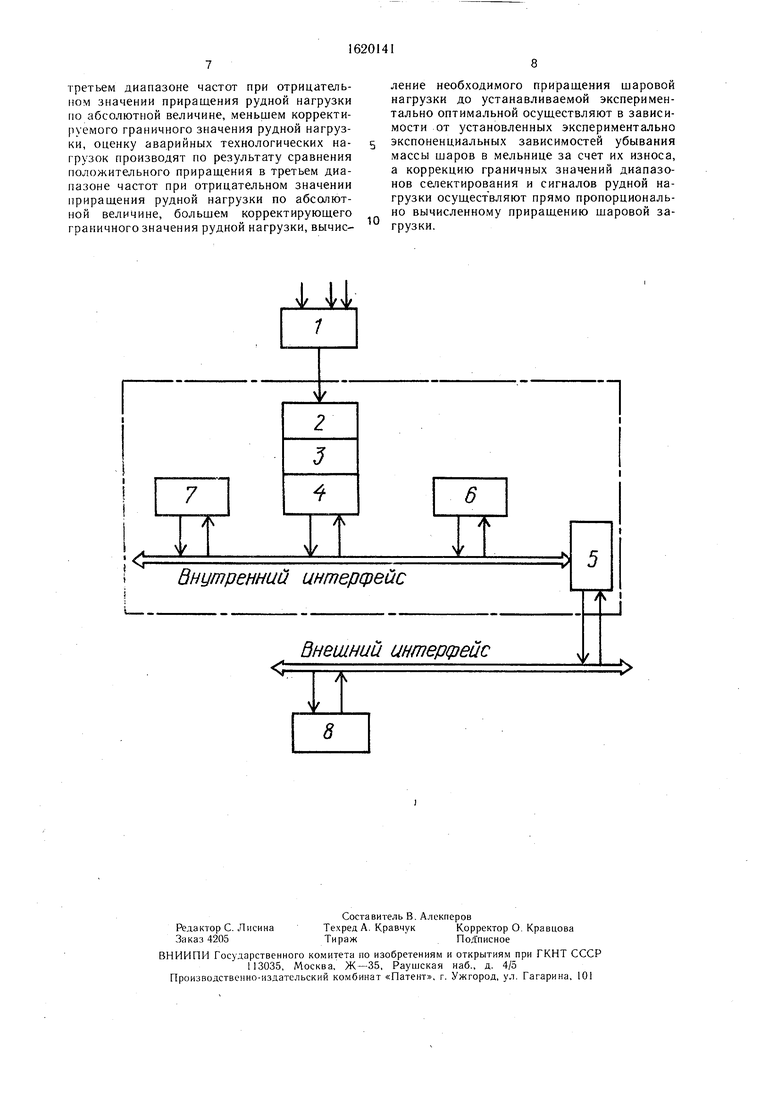
5 Способ реализуется с помощью устройства, которое включает в себя измерительный преобразователь 1 мощности, подключенный через вторичные обмотки трансформаторов тока и напряжения к сети электропитания
Q мельницы; преобразователь напряжения - код, состоящий из блока 2 нормализации, аналого-цифрового преобразоватея 3 и блока 4 гальванической развязки, контроллер 5, пульт 6 оператора и таймер 7. Через внешний интерфейс контроллер 5 имеет вза имо5 связь с блоком 8 памяти.
В непрерывном режиме измерительный преобразователь 1 мощности преобразует мощность потребляемой приводом мельницы в электрический сигнал 0--5 цА, который одновременно подают на два входа модуля
° ПНК, где производят нормализацию сигнала (преобразование ток - напряжение), аналого-цифровое преобразование нормализованного сигнала и гальваническую развязку преобразованного сигнала от внутренних электрических цепей.
В режиме синхронной выборки с запуском от таймера 7 контроллер 5 обеспечивает пересылку данных с регистра данных блока 2 в два заданных массива памяти бло- ка 8 - в режиме прямого доступа в память.
0 При этом контроллер 5 в режимном прерывании от таймера 7 попеременно в соответствии с программой,записанной в блок 8 памяти, производит следующие операции:
усреднение накопленных замечаний по
5 времени 1, равном периоду оборота мельницы (период обращения контроллера к массиву обеспечивается таймером), с запоминанием на один цикл усреднения предыдущего значения;
вычисление приращения ,i-М„
0 т.е. разницы между текущим усредненным сигналом мощности и аналогичным предыдущим;
последовательное сравнение полученного приращения с заданным диапазонами |А1Жз (где Ki-Кз - коррек5 тируемы), при этом, если , контроллер 5 дает команду на светодиодную индикацию «Ав.м. - аварийный механический режим в пульте оператора;
5
если K,, контроллер 5 производит определение отклонения текущего Д от оптимального ДОЛт , устанавливаемого экспериментально, т.е. -Д и дает команду на перевод полученного значения в регистр данных пульта оператора для многоэлементной цифровой индикации; одновременно при всяком изменении п, отличном от нуля, контроллер дает команду на коррекцию Кь Кг, Кз, а также подлежащих фиксации значений рудного заполнения ур прямо пропорционально полученному п (что связано с неоднозначностью реакции системы при различном шаровом заполнении). Без обновления п в режиме нормального функционирования из- мельчительного агрегата (без догрузки шаров) увеличение п за счет износа шаровой загрузки рассчитывается контроллером по закону:
п,по- ett,
где R - коэффициент цикла опроса (1/с). Периодичность опроса (ti, t2, t3 ....) определяется установкой таймера 7. Полученные значения п, постоянно фиксируются в виде многоэлементной цифровой индикации;
если К), контроллер 5 производит вычисление рудной загрузки мельницы ур по формуле п,- Д, где m - настроечный коэффициент. Полученные значения направляются контроллером в регистр данных пульта оператора для многоэлементной цифровой индикации и одновременно в блок 8 памяти для накопления и последующего суммирования по Т при команде с таймера 7 (Т - время, достаточное для технолого-эко- номической оценки работы измельчитель- ного агрегата, например смена - 8ч);
если Д меньше нуля, но по абсолютной величине больше Кз, контроллер 5 дает команду на светодиодную индикацию сигнала «АВ, Т - аварийный технологический режим в модуле б, одновременно контроллер 5 дает команду на запрет индикации yf, yn на время Тз, что осуществляется таймером 7. Время Тз устанавливается экспериментально при отладке системы;
если , контроллер 5 дает команду на снятие запрета индикации у уп, одновременно посылая сигнал по каналу вычисления Y (см. п. 5 описания программы действия).
Вторая часть программы направлена на определение коэффициента полезной работы мельницы и включает оперирование с вторым исходным массивом данных, а также с массивом данных суммирования по Т откорректированных сигналов YO:
по разрешаемому сигналу от таймера 7 контроллер 5 производит суммирование накопленных во втором исходном массиве данных мощности,, потребляемой мельницей М„ по времени Т (аналогичном периоду Т суммирования Y/);
поскольку Y суммируются в усредненном по Tjg виде, а М„ в прямом, соответствующем тактовой частоте таймера 7, контроллер 5 производит синхронизацию полученных сумм по общему времени, приравненному к времени расчета -Ур, путем отсекания последующих текущих значений М„ в следующий цикл накопления;
после синхронизации полученных сумм контроллер 5 производит вычисление выражения )- К и направляет полученное значение в регистр данных модуля ПО для многоэлементной цифровой индикации (К - настроечный коэффициент, пропорциональный КПД привода и двигателя мель- ницы).
Начальные коэффициенты границ диапазонов селекции Ki, K2, Кз, коэффициент оптимального шарового заполнения Д, коэффициент цикла опроса R, настроечные коэффициенты т, К определяются в период наладки и эксплуатации системы.
Работа системы в режиме программного прерывания от таймера позволяет организовать контроль параметров заполнения мельницы на одном контроллере, что упро- 5 щает и удешевляет систему.
Способ позволяет повысить точность контроля загрузки шаровой мельницы не менее чем на 30%, а также расширить область применения способа
0
за
Формула изобретения
0
Способ контроля загрузки шаровой мельницы, включающий измерение сигнала мощности, потребляемой двигателем, с последующим сглаживанием и селектированием сигна5 ла и оценку шаровой и рудной загрузки, отличающийся тем, что, с целью повышения точности контроля, оценивают аварийные, механические, пусковые и технологические нагрузки, устанавливают экспериментальную экспоненциальную зависимость убывания массы шаров в мельнице за счет их износа и вычисляют необходимое приращение шаровой загрузки до установленной экспериментально оптимальной, сглаживание сигнала мощности производят на интервале времени,
5 равном периоду оборота мельницы, а селек- тирование ведут путем последовательного сравнения положительного приращения те- кущего значения усредненного сигнала мощности к предыдущему усредненному с тремя заданными сопредельными диапазонами час0 тот с корректируемыми границами, причем оценку аварийных, механических и пусковых нагрузок мельницы осуществляют по результату сравнения положительного приращения в первом диапазоне частот, оценку степени шаровой загрузки производят по результату
сравнения положительного приращения во втором диапазоне частот, оценку степени рудной загрузки осуществляют по результату сравнения положительного приращения в
7
8
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения догрузки измельчающих тел | 1981 |
|
SU995881A1 |
| Способ управления шаровым заполнением мельницы | 1990 |
|
SU1796256A1 |
| СПОСОБ ФИКСАЦИИ УРОВНЯ ШУМА В БАРАБАННОЙ МЕЛЬНИЦЕ | 2015 |
|
RU2614646C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ИЗМЕЛЬЧЕНИЯ МАТЕРИАЛА В БАРАБАННОЙ МЕЛЬНИЦЕ | 2022 |
|
RU2797096C1 |
| Способ управления загрузкой шаровой барабанной мельницы | 1982 |
|
SU1066647A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ИЗМЕЛЬЧЕНИЯ РУДЫ В БАРАБАННОЙ МЕЛЬНИЦЕ | 2015 |
|
RU2621937C2 |
| Способ управления работой шаровой барабанной мельницы | 1985 |
|
SU1416178A1 |
| Способ управления работой шаровой барабанной мельницы | 1982 |
|
SU1065020A1 |
| Способ управления работой шаровой барабанной мельницы | 1985 |
|
SU1304876A1 |
| Способ управления шаровыми мельницами | 1987 |
|
SU1414462A1 |
Изобретение относится к автоматизации контроля и управления процессами измельчения, может быть использовано на предприятиях металлургической и строительной промышленности, позволяет повысить точность контроля. Для достижения поставленной цели измеряют сигнал мощности, потребляемой двигателем, сглаживают сигнал мощности на интервале времени, равном периоду оборота мельницы, селектируют сигнал путем последовательного сравнения положительного приращения текущего значения усредненного сигнала мощности к предыдущему усредненному с тремя заданными сопредельными диапазонами частот с корректируемыми границами, осуществляют оценку аварийных механических и пусковых нагрузок мельницы по результату сравнения положительного приращения в первом диапазоне частот, степени шаровой загрузки - по результату сравнения положительного приращения во втором диапазоне частот, степени рудной загрузки - по результату сравнения положительного приращения в третьем диапазоне частот при отрицательном значении приращения рудной нагрузки по абсолютной величине, аварийных технологических нагрузок - по результату сравнения положительного приращения в третьем диапазоне частот при отрицательном значении приращения рудной нагрузки по абсолютной величине, большем корректируемого граничного значения рудной нагрузки. 1 ил. Ј
третьем диапазоне частот при отрицательном значении приращения рудной нагрузки по абсолютной величине, меньшем корректируемого граничного значения рудной нагрузки, оценку аварийных технологических нагрузок производят по результату сравнения положительного приращения в третьем диапазоне частот при отрицательном значении приращения рудной нагрузки по абсолютной величине, большем корректирующего граничного значения рудной нагрузки, вычисw
Внутренний интерфейс
Внешний интерфейс
ление необходимого приращения шаровой нагрузки до устанавливаемой экспериментально оптимальной осуществляют в зависимости от установленных экспериментально экспоненциальных зависимостей убывания массы шаров в мельнице за счет их износа, а коррекцию граничных значений диапазонов селектирования и сигналов рудной нагрузки осуществляют прямо пропорционально вычисленному приращению шаровой загрузки.
А
(
f
| Способ автоматического определения степени загрузки мельницы | 1980 |
|
SU874186A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 770543, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
