Изобретение относится к автоматизации одновременного контроля электрических и неэлектрических параметров и управления ими, в частности к оптимизации регулирования процесса измельчения материалов в барабанных мельницах, и может быть использовано в горно-обогатительной, металлургической, химической, цементной, алмазной, строительной и других отраслях промышленности, связанных с процессами измельчения материалов.
Способ для определения уровня заполнения загруженного барабана мельницы (патент РФ №2080932, опубл. 10.06.1997), включающий измерение величин электрических характеристик работы приводного двигателя мельницы и заполнения мельницы, сравнение сигналов приращения величин и изменение подачи питания в мельницу, поддержание экстремальной характеристики работы приводного двигателя, причем сравнение сигналов приращения величин выполняют вычисляя производные потребляемые мощности приводного двигателя по величине заполнения мельницы, изменение подачи питания в мельницу осуществляют пропорционально величине производной в сторону увеличения при положительном значении производной и в сторону уменьшения при отрицательном значении производной, в качестве экстремальной характеристики работы приводного двигателя берут коэффициент мощности и регулируют его, изменяя ток возбуждения двигателя в зависимости от результатов сравнения сигналов приращения измеряемых величин.
Недостатком является низкое качество помола целевого продукта, поскольку управление процессом измельчения осуществляется исключительно по электрическому параметру, такому как реактивная мощность, в свою очередь сырье имеет различные прочностные свойства, которые не представляется возможным определить через электрические параметры и соответственно учесть при настройке регулятора.
Известен способ управления процессом измельчения руды в барабанной мельнице (патент РФ №2621937, опубл. 08.06.2017), включающий определение оптимального задания по подаче руды в мельницу и соотношение руда-вода для измельчения рудной массы до заданного гранулометрического состава в технологическом контуре с классификацией. Датчики располагают в конструктивных элементах, на основных и вспомогательных узлах и механизмах технологического оборудования, причем сигналы датчиков, а также их интегральные, дифференциальные и комплексные показатели необходимым образом масштабируют и оценивают в заданном промежутке времени с учетом их влияния на управляющие воздействия. Задания регулирования автоматически изменяются, оптимизируясь с учетом текущих физико-механических свойств руды и текущего состояния оборудования в функции для максимальной переработки руды, при этом сформированные задания для ПИД-регуляторов управляют исполнительными механизмами и приводами, контролируя нагрузку приводов основных и вспомогательных механизмов при сравнении с базовыми данными, оптимально загружают руду, регулируют подачу воды в оптимальном соотношении твердое-жидкое и осуществляют защиту оборудования от перегрузов в контуре измельчения.
Недостатками представленного способа является низкая надежность системы управления из-за избыточного числа измеряемых параметров без резервирования датчиков, посредством которых вычисляют отклонение для регулятора. Низкая устойчивость системы управления, поскольку при вычислении косвенного параметра складываются погрешности каждого датчика, в результате чего падает точность измерения, и, соответственно, падает точность регулирования. Кроме того, недостатком является контур регулирования подачи руды по устройству определяющему качество измеряемый руды, поскольку он обладает высокой колебательностью из-за высоких погрешностей измерительного устройства, что значительно сокращает ресурс электропривода.
Способ управления процессом измельчения материалов в мельничном агрегате (патент РФ №2300798, опубл. 10.06.2007), включающий регулирование величины загрузки материала и расхода транспортной среды для оптимизации, по меньшей мере, одного контролируемого параметра, причем для оптимизации контролируемых параметров и достижения максимальной производительности при минимальном энергопотреблении в процессе по измельчению материала, периодически производят контролируемый перегруз мельничного агрегата и устанавливают соответствующее ему максимальное значение загрузки мельничного агрегата, при этом количество mтс подаваемой в мельничный агрегат транспортной среды рассчитывают по формуле.
Недостатком является низкая устойчивость системы управления, поскольку при вычислении косвенного параметра складываются погрешности каждого датчика, в результате чего падает точность измерения, и, соответственно, падает точность регулирования.
Способ для определения уровня заполнения загруженного барабана мельницы (патент РФ №2440849, опубл. 27.01.2012), включающий этапы, где барабан посредством привода нагружается приводным моментом и приводится во вращательное движение, после чего приводной момент на приводе устанавливается в соответствии с заданной последовательностью тестирования привода, причем определяется временная характеристика числа оборотов барабана, вызванного последовательностью тестирования привода, причем определенная характеристика числа оборотов подвергается анализу, причем при анализе характеристики числа оборотов определяется момент инерции загруженного и приведенного в движение барабана, и на основе результатов анализа определяется уровень заполнения.
Недостатком является низкая точность регулирования процесса измельчения поскольку управление проводят на основе косвенных параметров, а также не учитывают свойства сырья, такие как твердость и гранулометрический состав, что также снижает энергоэффективность процесса измельчения, а также снижает качество помола целевого продукта.
Способ управления шаровой мельницей с автоматическим регулированием скорости вращения барабана (заявка на патент Китая №111298952А, опубл.31.03.2020), принятый за прототип, включающий загрузку материала, измельчение материала при автоматическом регулировании скорости вращения мельницы в четыре этапа каждый из которых имеет свою скорость вращения барабана мельницы, которая автоматически поддерживается с помощью ПЛК и частотного привода, причем ПЛК также отсчитывает время до окончания этапа и переключает режим мельницы по истечению времени, после измельчения осуществляют выгрузку материала из мельницы.
Недостатком является высокое энергопотребление привода мельницы, поскольку скорость вращения изменяется дискретно, то есть на длительные промежутки времени устанавливается определенная скорость вращения и не изменяется до наступления следующего этапа измельчения.
Техническим результатом является снижение энергопотребления привода барабанной мельницы в процессе измельчения материала.
Технический результат достигается тем, что до начала измельчения материала задают свойства материала и параметры шаров измельчения на рабочую станцию, при этом привод барабанной мельницы соединен с частотным приводом, с возможностью получения и передачи информации на контроллер, который затем с возможностью получения и передачи информации через сетевой кабель соединен с рабочей станцией, измельчение материала осуществляют при постоянном регулировании скорости вращения барабана мельницы посредством синхронизации с моделью, при этом уточняют посредством нее крупность материала в данный момент времени, сравнивают с заданной крупностью, отправляют данные скорости вращения барабана мельницы на контроллер, посредством которого задают таблицу векторов скорости для частотного привода, после чего посредством цифрового порта передают их на частотный привод, который, который в свою очередь, регулирует скорость вращения барабана мельницы за счет изменения частоты входного напряжения в электропривод, причем при измельчении измеряют вибрации на электроприводе и приводном валу мельницы посредством датчиков, которые нормируют сигнал и передают посредством параллельного порта сигнал на контроллер, который обрабатывает и сравнивает с максимально допустимым, в случае его превышения электропривод мельницы останавливают, при измельчении материала снимают электрические характеристики электропривода мельницы, которые обрабатывают и используют для уточнения модели. Осуществляют подачу воды в мельницу.
Способ поясняется следующими фигурами:
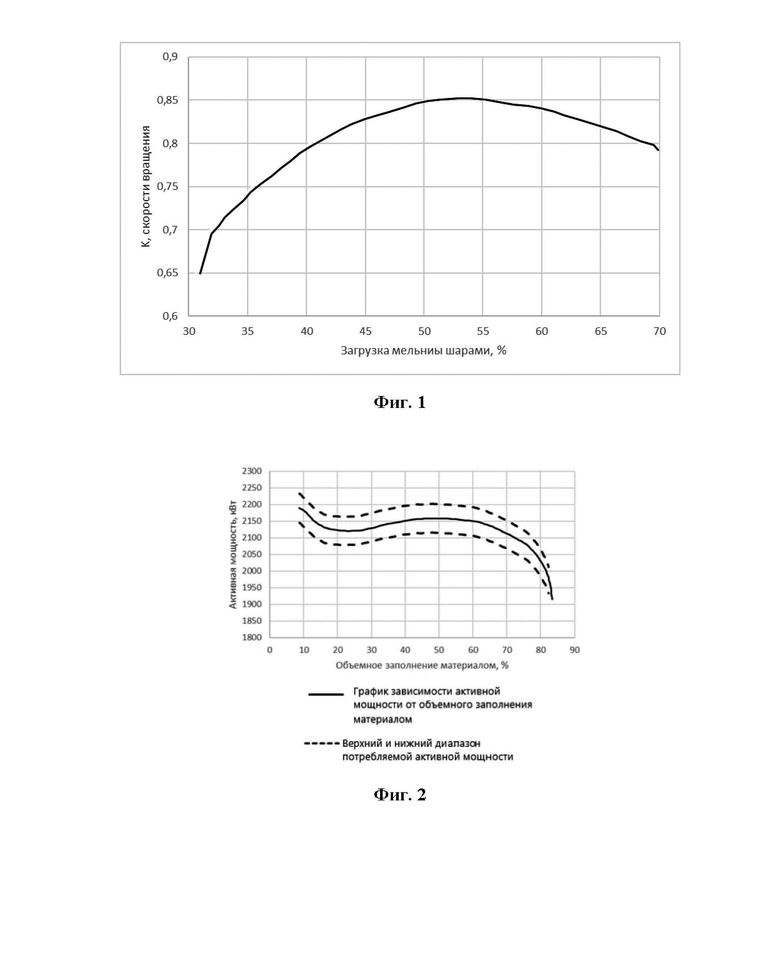
фиг.1 - график зависимости оптимальной скорости вращения барабана от шаровой загрузки мельницы;
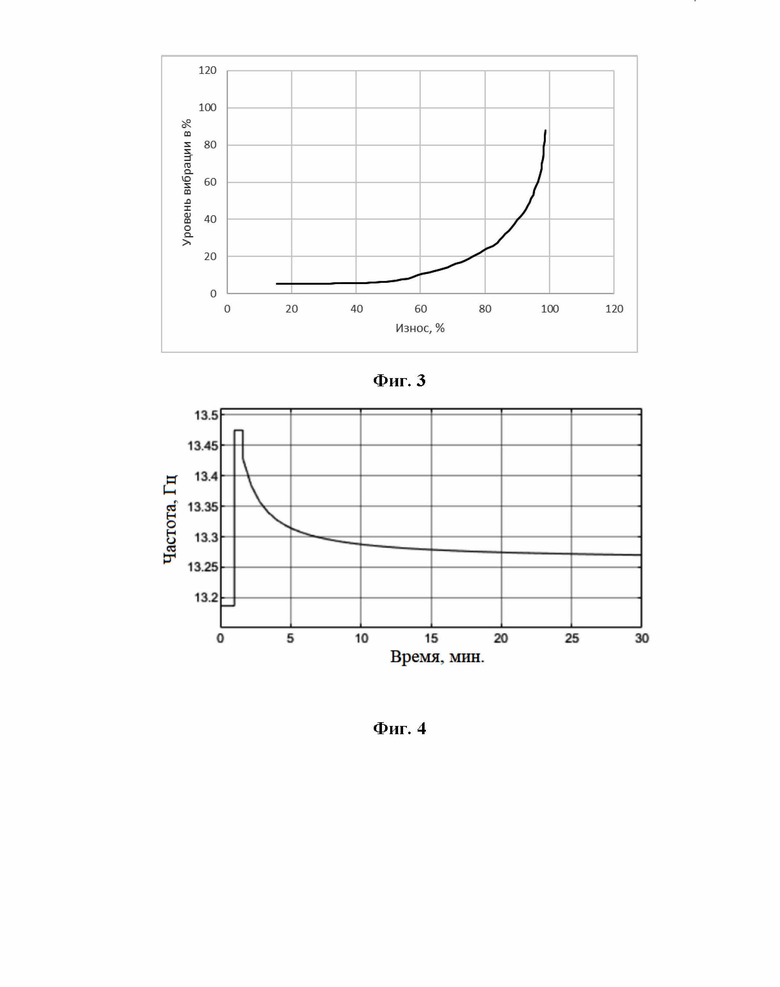
фиг.2 - график зависимости активной мощности электропривода от загрузки материалов в барабане мельницы;
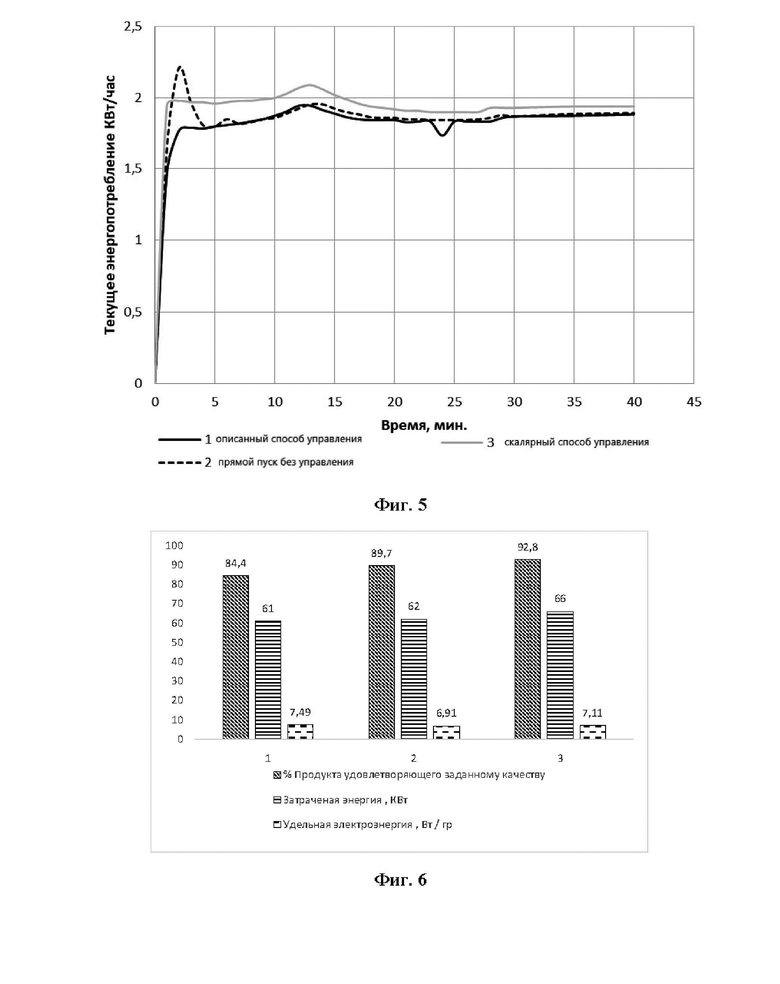
фиг.3 - график зависимости интенсивности вибраций на подшипниках от износа подшипника;
фиг.4 - график уставки частоты вращения барабана от времени, заданный моделью;
фиг.5 - график зависимости текущей потребляемой мощности электропривода от времени;
фиг.6 - гистограмма результатов затраченной энергии, удельной мощности и выхода готового продукта, удовлетворяющего заданному качеству.
Способ осуществляется следующим образом. На первом этапе осуществляют загрузку материала в мельницу. В качестве материала могут быть использованы различные рудные и нерудные полезные, а также строительные материалы. Перед началом измельчения материала на рабочей станции в качестве исходных данных для математической модели задаются данные о свойствах загружаемого материала, такие как прочность на сжатие, крупность и массу загрузки материала, вводятся параметры шаров измельчения, например диаметр шаров, и начальная шаровая загрузка. Представленный способ управления процессом измельчения материала в барабанной мельнице может быть использован как для сухого измельчения, так и для мокрого измельчения. В случае мокрого измельчения на рабочей станции дополнительно задаются данные о количестве воды, подаваемой в мельницу. В соответствии с заданными параметрами процесса на рабочей станции осуществляется загрузка материала, шаров измельчения, и в случае мокрого помола, подача воды. После загрузки мельницы осуществляют измельчение материала. Для этого привод барабанной мельницы соединен с частотным приводом, с возможностью получения и передачи информации через сетевой кабель на контроллер, который затем с возможностью получения и передачи информации через сетевой кабель соединен с рабочей станцией, на которой установлена математическая модель. Частотный привод по команде с рабочей станции осуществляет запуск и вращение барабана мельницы с заданной скоростью. Регулирование скорости вращения барабана мельницы осуществятся посредством синхронизации с моделью, при этом посредством модели уточняют крупность материала в данный момент времени, сравнивают с заданной крупностью посредством ввода уставки на рабочей станции, и отправляют данные скорости вращения барабана мельницы на контроллер. Затем посредством контроллера формируется таблица векторов скорости для частотного привода, после чего посредством первого цифрового порта передают их на частотный привод, который, в свою очередь, регулирует скорость вращения барабана мельницы за счет изменения частоты входного напряжения в электропривод. За счет этого обеспечивается подбор наиболее оптимальной скорости вращения барабана мельницы, для данного момента времени в зависимости от крупности материала на текущем этапе.
Кроме того, в процессе измельчения дополнительно измеряют вибрации. Для этого на электроприводе и приводном валу мельницы установлены датчики вибрации, соединенные через провода с контроллером, а затем с рабочей станцией. Датчики нормируют полученный сигнал и передают его посредством параллельного порта на контроллер, где он обрабатывается и сравнивается с максимально допустимым. В случае если полученный сигнал превышает максимально допустимый, то электропривод мельницы останавливается и на рабочей станции включается блокировка и отображается ошибка. После измельчения осуществляют выгрузку материала из мельницы. При этом при измельчении материала снимают электрические характеристики электропривода мельницы для хранения, обработки и дополнения модели.
При измельчении материала для уточнения и дополнения модели снимаются электрические характеристики электропривода мельницы с помощью частотного привода посредством цифрового порта и передаются на контроллер, затем с него передают посредством второго цифрового порта на OPC сервер, который вносит снятые параметры в базу данных для последующего хранения, обработки и дополнения модели.
Описанный способ поясняется следующими примерами.
Пример 1. На первом этапе осуществляли загрузку апатит-нефелиновой руды, в барабанную мельницу. Затем, до начала измельчения руды задавали ее свойства, в частности, прочность на сжатие 47 МПа, крупность от -6,4 до -0.1 мм и массу загрузки 150 гр, и задавали параметры шаров измельчения, такие как диаметр шаров от 15 до 17 мм, и начальная шаровая загрузка 40%.
Исходные данные о свойствах загружаемого материала водятся для того, чтобы корректно инициализировать модель, которая в свою очередь рассчитывает оптимальную скорость вращения барабана мельницы. При этом скорость вращения мельницы динамически меняется в процессе измельчения в зависимости от шаровой загрузки (Фиг.1), а загрузка, в свою очередь, влияет на оптимальную активную мощность электропривода (Фиг.2).
После осуществляли загрузку шаров измельчения, затем проводили измельчение руды. Измельчение руды происходит при постоянном регулировании скорости вращения барабана мельницы посредством синхронизации с моделью, при этом посредством модели уточняли крупность сырья в данный момент времени, сравнивали с заданной крупностью посредством ввода уставки (Фиг.4) с панели оператора, и отправляли данные скорости вращения барабана мельницы на контроллер. Затем посредством контроллера определяется таблица векторов скорости для частотного привода, после чего посредством цифрового порта передавали их на частотный привод, который, в свою очередь, регулировал скорость вращения барабана мельницы за счет изменения частоты входного напряжения в электропривод. При измельчении измеряли вибрации на электроприводе и приводном валу мельницы посредством датчиков, которые нормируют сигнал и передают посредством параллельного порта сигнал на контроллер, где он обрабатывается и сравнивается с максимально допустимым. Измерения вибрации осуществляют с целью предотвращения выхода из строя мельницы из-за превышения допустимого износа подшипника (Фиг.3).
После измельчения осуществляют выгрузку руды из мельницы. Так же при измельчении снимали электрические характеристики электропривода мельницы с помощью частотного привода, причем снятые характеристики посредством цифрового порта передавали на контроллер, затем с него посредством второго цифрового порта передавали на OPC сервер, который вносит снятые параметры в базу данных для последующего хранения, обработки и дополнения модели.
В результате проведения эксперимента выявлено, что при описанном способе управления процессом измельчения снижается энергопотребление привода барабанной мельницы (Фиг.5). Из графика видно, что при предложенном способе управления, за счет плавного пуска стартовые токи не превышают номинальные токи двигателя, а общее энергопотребление снижается на 5-20% в различные моменты времени по сравнению со скалярном способом управления.
Пример 2. Способ управления процессом измельчения материала в барабанной мельнице аналогичен примеру 1, в качестве материала для измельчения использовали железную руду. Затем, до начала измельчения руды задавали ее свойства, в частности, прочность на сжатие 47 МПа, крупность от -6,4 до -0.1 мм и массу загрузки 150 гр, и задавали параметры шаров измельчения, такие как диаметр шаров от 15 до 17 мм, и начальная шаровая загрузка 40%.
В результате проведения эксперимента выявлено, что при описанном способе управления процессом измельчения снижается энергопотребление привода барабанной мельницы, поскольку при соизмеримом удельном энергопотреблении, получено большее количество продукта, удовлетворяющего заданному качеству из одинакового количества сырья. Из гистограммы (Фиг.6) видно, что выход продукта удовлетворяющего заданному качеству увеличивается от 4 до 15% в зависимости от альтернативного способа регулирования.
Предлагаемое техническое решение позволяет снижать энергопотребления привода барабанной мельницы и увеличить массу готового продукта в процессе измельчения материала, при понижении вероятности выхода из строя барабанной мельницы за счет плавного пуска и регулирования скорости вращения барабана мельницы. Кроме этого, за счет измерения вибраций на электроприводе и приводном валу реализуется система предиктивного обнаружения выхода из строя основных узлов барабанной мельницы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОНИТОРИНГА ПРОЦЕССА ИЗМЕЛЬЧЕНИЯ В БАРАБАННЫХ МЕЛЬНИЦАХ | 2023 |
|
RU2806426C1 |
| Способ управления загрузкой барабанной мельницы | 1981 |
|
SU1012984A1 |
| Способ управления загрузкой шаровой барабанной мельницы | 1982 |
|
SU1066647A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ИЗМЕЛЬЧЕНИЯ РУДЫ В БАРАБАННОЙ МЕЛЬНИЦЕ | 2015 |
|
RU2621937C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ИЗМЕЛЬЧЕНИЯ МАТЕРИАЛОВ В МЕЛЬНИЧНОМ АГРЕГАТЕ | 2006 |
|
RU2300798C1 |
| Способ управления работой барабанной мельницы | 1974 |
|
SU492303A1 |
| МЕЛЮЩАЯ СРЕДА, СИСТЕМА И СПОСОБ ОПТИМИЗАЦИИ КОНТУРА ИЗМЕЛЬЧЕНИЯ | 2019 |
|
RU2775723C2 |
| СПОСОБ ТОНКОГО ИЗМЕЛЬЧЕНИЯ ЦЕМЕНТНОГО КЛИНКЕРА | 2005 |
|
RU2361675C2 |
| Способ управления работой барабанной мельницы | 1988 |
|
SU1544494A1 |
| МЕЛЬНИЦА МОКРОГО РУДНОГО САМОИЗМЕЛЬЧЕНИЯ | 1996 |
|
RU2129046C1 |
Изобретение относится к регулированию процесса измельчения материалов в барабанных мельницах. Способ включает загрузку и измельчение материала при автоматическом регулировании скорости вращения барабана мельницы и выгрузку материала из мельницы. До начала измельчения задают свойства материала и параметры шаров измельчения на рабочую станцию. Привод барабанной мельницы соединен с частотным приводом для получения и передачи информации на контроллер, соединенный с рабочей станцией. Скорость вращения барабана мельницы регулируют посредством синхронизации с моделью, с помощью которой уточняют крупность материала в данный момент времени по сравнению с заданной крупностью. При измельчении измеряют вибрации на электроприводе и приводном валу мельницы и передают сигнал на контроллер, который обрабатывает и сравнивает с максимально допустимым. При его превышении электропривод мельницы останавливают. Способ позволяет снизить энергопотребление привода барабанной мельницы в процессе измельчения материала. 1 з.п. ф-лы, 6 ил., 2 пр.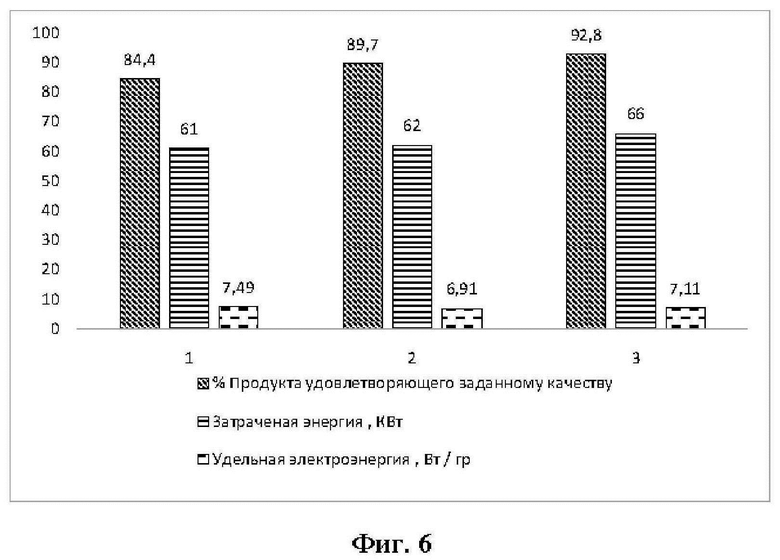
1. Способ управления процессом измельчения материала в барабанной мельнице, включающий загрузку материала, измельчение материала при автоматическом регулировании скорости вращения барабана мельницы и выгрузку материала из мельницы, отличающийся тем, что до начала измельчения материала задают свойства материала и параметры шаров измельчения на рабочую станцию, при этом привод барабанной мельницы соединен с частотным приводом с возможностью получения и передачи информации на контроллер, который затем с возможностью получения и передачи информации через сетевой кабель соединен с рабочей станцией, измельчение материала осуществляют при постоянном регулировании скорости вращения барабана мельницы посредством синхронизации с моделью, при этом уточняют посредством нее крупность материала в данный момент времени, сравнивают с заданной крупностью, отправляют данные скорости вращения барабана мельницы на контроллер, посредством которого задают таблицу векторов скорости для частотного привода, после чего посредством цифрового порта передают их на частотный привод, который, в свою очередь, регулирует скорость вращения барабана мельницы за счет изменения частоты входного напряжения в электропривод, причем при измельчении измеряют вибрации на электроприводе и приводном валу мельницы посредством датчиков, которые нормируют сигнал и передают посредством параллельного порта сигнал на контроллер, который обрабатывает и сравнивает с максимально допустимым, в случае его превышения электропривод мельницы останавливают, при измельчении материала снимают электрические характеристики электропривода мельницы, которые обрабатывают и используют для уточнения модели.
2. Способ по п.1, отличающийся тем, что осуществляют подачу воды в мельницу.
| CN 111298952 A, 19.06.2020 | |||
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ИЗМЕЛЬЧЕНИЯ РУДЫ В БАРАБАННОЙ МЕЛЬНИЦЕ | 2015 |
|
RU2621937C2 |
| Способ управления работой барабанной мельницы | 1974 |
|
SU492303A1 |
| US 4635858 A, 13.01.1987 | |||
| US 5698797 A, 16.12.1997 | |||
| CN 205920343 U, 01.02.2017. | |||
