(54) СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ СТЕПЕНИ ЗАГРУЗКИ МЕЛЬНИЦЫ

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования загрузкой барабанной мельницы мелющими телами | 1974 |
|
SU507357A1 |
| Способ автоматической диагностики барабанной мельницы | 1983 |
|
SU1130403A1 |
| Способ управления барабанными мельницами самоизмельчения руд | 1979 |
|
SU856557A1 |
| Способ управления приводом машины | 1990 |
|
SU1713766A1 |
| СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ УРОВНЯ ЗАПОЛНЕНИЯ МЕЛЬНИЦЫ | 2007 |
|
RU2440849C2 |
| СПОСОБ ИЗМЕРЕНИЯ ГРАВИТАЦИОННОГО ПОЛЯ ЗЕМЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2825190C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЦЕНТРА МАСС ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2564375C1 |
| Устройство для управления загрузкой барабанной мельницы | 1974 |
|
SU507358A1 |
| Способ контроля загрузки шаровой мельницы | 1989 |
|
SU1620141A1 |
| Способ управления технологией самоизмельчения руд в промышленных барабанных мельницах | 1986 |
|
SU1447405A1 |
1
Способ автоматического определения степени загрузки мельницы относится к управлению процессами измельчения в мельницах вращающегося типа и может быть использован в промышленности строительных материалов, горнорудной промышленности и других отраслях, где в процессе загрузки мельниц возникает необходимость измерения степени их загрузки. Известен способ автоматического .определения степени загрузки мель ниц, включающий измерение мощности, потребляемой приводом мельницы, где для повышения точности измерения создают искусственный дебаланс мельницы, а затем путем выделения гармонической составлякицей спектра низкочастотных колебаний и измерения ее. амплитуды определяют степень заполнения мельницы 1.
Однако этот способ сложен в реализации и не обеспечивает необходимой точности ввиду значительного влияния на спектр колебаний сил трения механизмов привода мельнихдл.
Наиболее близким к предлагаемому является способ автоматического определения степени загрузки мельницы включающий измерение мощности, потребляемой приводом мельницы и оценку степени загрузки. В этом способе для уменьшения погрешности, вносимой силами трения, дополнительно измёря5 ют величину мощности, расходуемой на преодоление сил трения L2J.
Недостатком известного способа является то, что. величина мощности, расходуемой на преодоление сил трения, является переменной и меняется как в течение времени одного оборота мельницы, так и с течением более длительного времени, что существенно снижает точность измерений. Кроме
15 того,известные способы определяют степень заполнения мельницы по косвенным параметрам, подверженным влиянию различного рода факторов.
Цель изобретения-повышение точности определения степени загрузки мельницы.
Указанная цель достигается тем, что в способе автоматического определения степени загрузки мельницы,
25 включающем измерение мощности, потребляемой приводом мельницы, и оценку степени загрузки, дополнительно периодически измеряют угловое ускорение мельницы, а измерение мощности,
30 потребляемой приводом, осуществляют
при первом значении углового ускорения, равном нулю, и при втором значении по модулю большему заданного уровня, причем оценку степени загрузки производят по моменту инерции вращающейся внутри мельницы массы, который вычисляют путем деления разности двух зафиксированных значений потребляемой мощности на второе значение углового ускорения.
Сущность способа заключается в следующем.
Во вращательном движении при наличии углового ускорения роль массы играет момент инерции, в силу чего способы, использующие статические методы измерения (без учета ускорения), не могут дать необходимой точности измерения массы, вращающейся внутри мельницы. Тем более, что определение степени заполнения мельницы ведется не по значению вращающейся внутри мельницы массы, а.по косвенным параметрам, ;хотя и связанным с загрузкой мельницы, но значительно зависящим от возмущающих воздействий сил трени и связанной с ними неравнсялерностью вращения мельницы. Практически имеющие место броски потребляемой щ иводом мельницы мощности (тока) исключают возможность использовать известны способы в режиме автоматического управления мельницей.
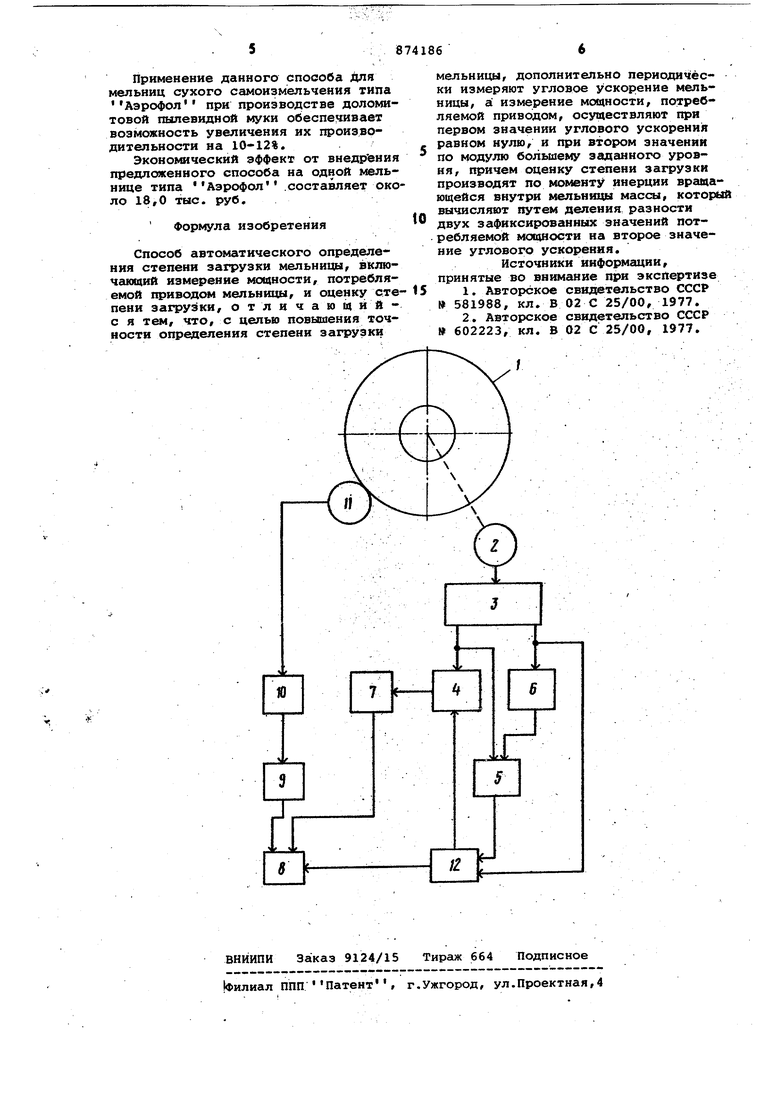
На чертеже представлена схема реализации предлагаемого способа.
С осью вращения мельницы I кинематически связан измеритель ускорения (акселерометр) 2, выход которого соединен с блоком селекции 3. Выходы блока селекции 3 подключены к вентилю 4, схеме совпадения 5 и схеме задержки 6, Выход вентиля 4 соединен с выходом преобразователя 7, выход которого подключен к входу вычислительного блока 8. Второй вход вычислительного блока 8 через преобразователь 9 соединен с измерительны блоком 10 привода 11 мельницы 1.
Блок управления 12 по входам соединен с выходом схемы совпадения 5 и блоком селекции 3, а его выходы подключены к входам вентиля 4 и вычислительного блока 8.
Способ реализуется следующим образом.
В связи с неравномерйостью распределения сил трения в механизмах привода мельницы, колебаний питающей сети и перемещения загруженного сырья в течение каждого оборота. Мельница будет получать импульсы ускорения (замедления), которые регистрируются акселерометром 2.
В блоке селекции 3 выделяйтся сигналы значений ускорения, равные нулю € О, и значения ускорения (замедления) по модулю, больше некоторой задаваемой величины 6 I гЛ .Значение сЛ выбирается по показаниям акселерометра, как наиболее характерна величина ускорения для данной мельницы.
в момент, когда 6-0, сигнал с выхода блока селекции 3 подается в схему задержки бив блок управления 12. Величина задержки сигнала и блока 6 выбирается, как вреднее значени между интервалами измерения ускорений по показаниям акселерометра 2.
в момент прихода сигнала О в блок управления 12, последний выдает на управляющий вход вычислительного блока 8 команду на считывание значения потребляемой мощности 1триводом 11 мельницы 1 в данный момент времени. Этот сигнал через измерительный блок 10 и преобразователь 9 поступает на вход вычислительного блока 8, где регистрируется.
Тем регистрируется значение момента сил привода Мд при .
В момент, когда ускорение достигает заданного по модулю значения сигнал с выхода блока селекции 3 подается на вход вентиля 4 и схемы совпадения 5, где этот сигнал будет присутствовать до срабатывания задержки 6, после чего на входах схем совпадения 5 окажутся два сигнала, что вызывает появление сигнала на выходе последней. Этот сигнал поступает на вход блока управления 12, котоЕ«лй выдает сигнал подготовки приема информации вычислительным блоком 8 с преобразователя 7 путем разраиения прохождения .значенияЕ ЮЧ с выхода блока селекции 3 через вентиль 4 на вход преобразователя 7.
Одновременно по команде блока управления 12 вычислительным блоком 8 через преобразователь 9 и измерительный блок10 будет зарегистрировано в.торое значение потребляемой мощности приводом 11/ соответотвующее наличию ускорения € 7/1 схЧ , т.е. значение Мд (е |«Л() , а также регистрируется абсолютное значение ускоренияЕ Тогда в вычислительном блоке 8 определяется момент инерции О , при этом от значения tfд () вычитается ранее зарегистрированное значение Мд(€; 0) , а полученная разность делится на значение ускорения Е 7/1 что равно моменту инерции О враща«щеЪся мельницы.
При описании вращательного движения с помощью углового ускорения рол массы играет момент инерции, следовательно значение сигнала 3 , полученное в вычислительном блоке 8, соответствует степени загрузки мель ницы. При этом, как следует из способа определения этой величины, полностью исключается влияние изменений сил трения и. отпадает необходимость ихнепосредственного измерения, что упрощает техническую реализацию способа и повышает его точность. Применение данного способа Для мельниц сухого самоизмельчения типа Аэрофол при производстве доломитовой пылевидной муки обеспечивает возможность увеличения их производительности на 10-12%. Экономический эффект от внедрения предложенного способа на одной мельАзрофол .составляет око нице типа ло 18,0 тыс. руб. Формула изобретения Способ автоматического определения степени загрузки мельницы включгиощий измерение мощности, потребляемой приводом мельницы, и оценку сте пени загрузки, отличающийс я тем, что, с целью повышения точности определения степени загрузки мельницы, дополнительно периодически измеряют угловое Ускорение мельницы, а измерение мощности, потребляемой приводом, осуществляют при первом значении углового ускорения равном нулю, и при втором значении по модулю большему заданного уровня, причем оценку степени загрузки производят по моменту инерции вращающейся внутри мельницы масол, котор1:1й вычисляют путем деления, разности двух зафиксированных значений потребляемой мощности на второе значение углового ускорения. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 581988, кл. В 02 С 25/00, 1977. 2.Авторское свидетельство СССР 602223, кл. В 02 С 25/00, 1977.
