Изобретение относится к силоизмери- тельной технике, в частности к устройствам для измерения сил и моментов с использованием тензорезисторных датчиков.
Цель изобретения - повышение точности за счет исключения взаимного влияния компонент нагрузки и расширение функциональных возможностей за счет дополнительного измерения изгибающего момента. На фиг. 1 изображено устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез В-В на фиг. 2; на фиг. 4 - мостовая схема включения тензорезисто- ров для измерения крутящего момента; на фиг. 5 - мостовая схема включения тензоре- зисторов для измерения изгибающих моментов; на фиг. 6 - мостовая схема включения тензорезкюторов для измерения осевой силы.
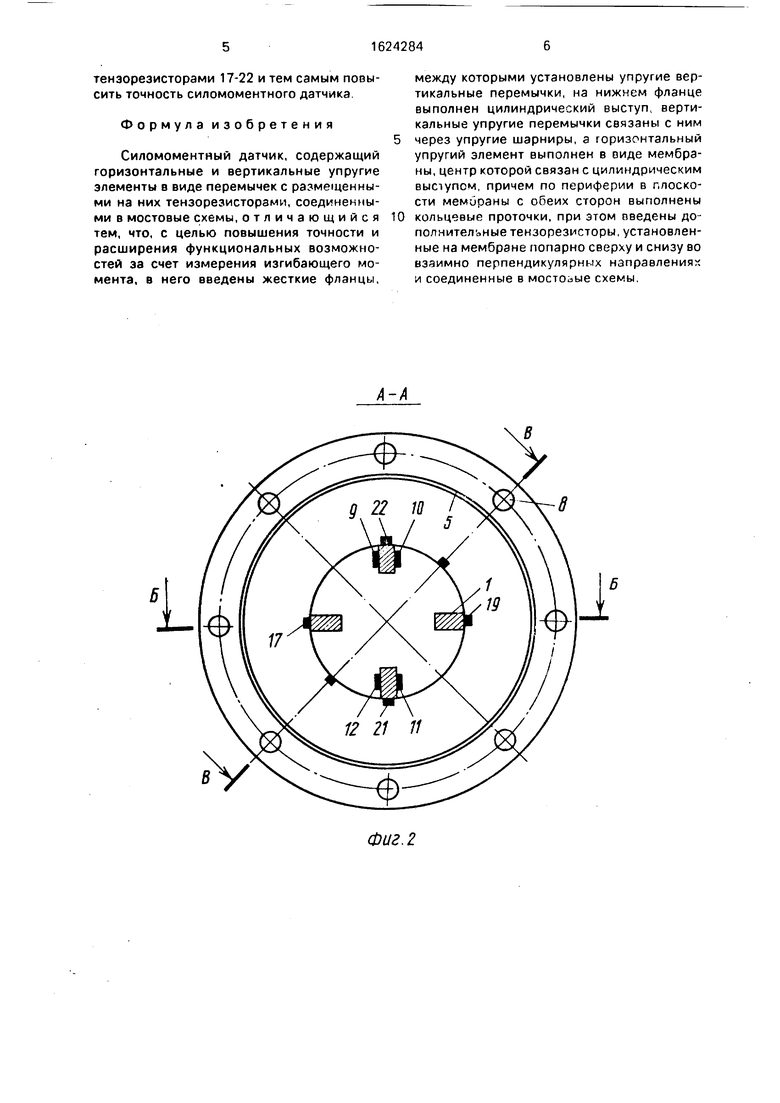
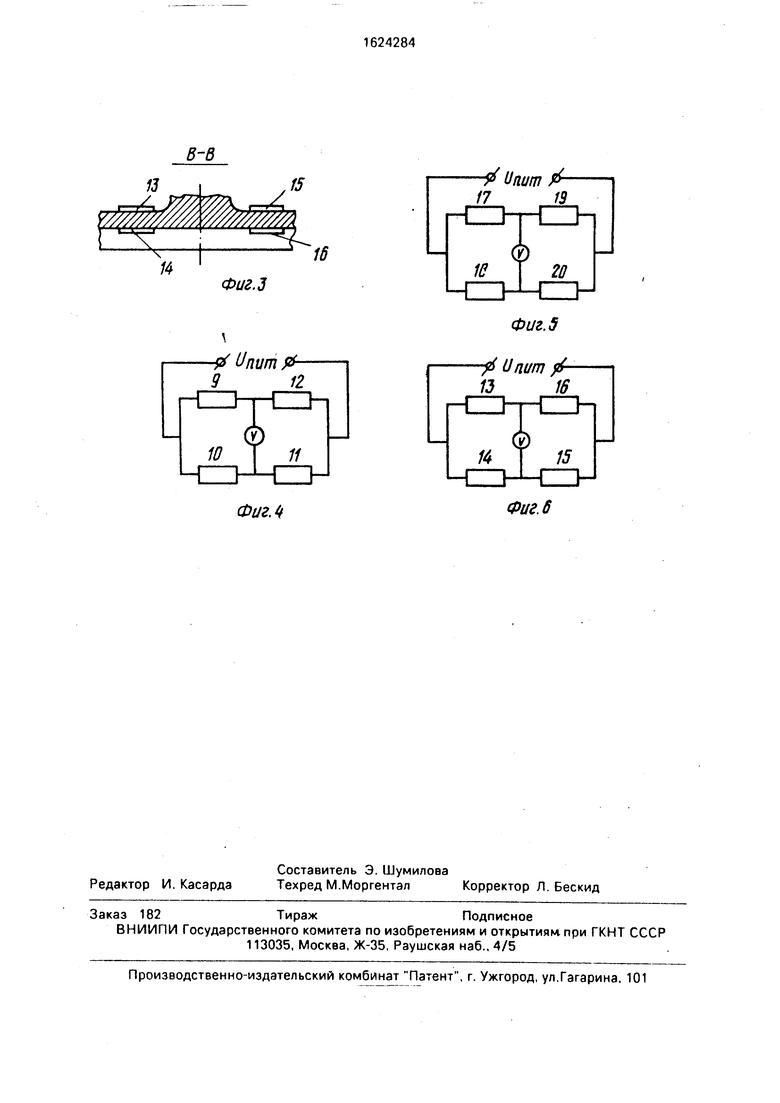
Силомоментный датчик содержит вертикальные упругие перемычки 1, объединенные по торцам жесткими фланцами 2, и мембрану 3, соединенную через цилиндрический выступ 4 с одним из жестких фланцев 2. По периферии мембрана 3 снабжена кольцевыми проточками 5 с обоих торцов. Упругие шарниры 6 на вертикальных упругих перемычках 1 размещены в месте стыковки с фланцем 2, присоединенным к мембране 3. Цилиндрический элемент 7 и отверстия по периферии мембраны 8 предназначены для крепления датчика к объекту измерения. Тензорезисторы 9-12 размещены попарно на вертикальных упругих перемычках 1, диаметрально противоположных относительно оси силомоментного датчика. Мостовая схема объединения этих тензоре- зисторов обеспечивает измерение только изгибных деформаций перемычек 1 под действием крутящего момента вокруг вертикальной оси датчика. Тензорезисторы 13- 16, наклеены попарно на торцах мембраны вблизи ее центра в местах наибольших изгибных деформаций от осевой силы.
Схема включения тензорезисторов обеспечивает измерение только деформаций от изгиба мембраны 3 осевыми силами и не чувствительна к изгибающим моментам. Напротив, схема включения тензорезисторов 17-20 обеспечивает измерение изгибающих моментов в плоскости оси мембраны 3 и не чувствительна к изгибу осевыми силами вдоль оси мембраны 3. Вторая схема (показана только одна пара тензорезисторов 21 и 22) расположена перпендикулярно плоскости тензорезисторов 17-20. Совместно обе схемы обеспечивают измерение из ибэющих моментов в любой плоскости, проходящей через вертикапьную ось устргйстрр.
Устройство работает следующим образом.
При приложении к силомоментному датчику крутящего момента вертикальные
перемычки 1 изгибаются. Максимальные деформации изгиба будут в районе жестко заделанных концов перемычек 1. Там же размещены тензорезисторы 9-12, фиксирующие эти деформации. Сигнал разбаланса
0 с моста тензорезисторов 9-12 изменяется пропорционально величине приложенного момента. При приложении к устройству осевой силы (растягивающей или сжимающей) изгибные деформации будут вблизи цент5 рагьной части мембраны. Сигнал разбаланса мостовой схемы тензорезисторов 13-16 меняется пропорционально величине осевой силы. Деформации мембраны 3 от кру- тящего момента в зоне наклейки
0 тензорезисторов 13-16 существенно меньше изгибных и полностью скомпенсированы схемой включения. В то же время деформации перемычек 1 от осевых нагрузок на устройство меньше изгибных от кру5 тящего момента и компенсируются окончательно схемой включения тензодат- чиков 9-12. При приложении к устройству изгибающего момента в плоскости, проходящей через ось силомоментного датчика, со0 ответствующие изгибные деформации мембраны фиксируются мостовыми схемами, наклеенными в двух взаимно перпендикулярных направлениях с тензо- резисторами 17-22.
5Сигналы с мостов пропорциональны изгибающим моментам. Так, например, при изгибе моментом устройства в плоскости, проходящей через его оси и ось, соединяющую тензорезисторы 17 и 19, максимальный
0 сигнал изгиба фиксируется схемой тензорезисторов 17-20. При этом сигнал на схеме с тензорезисторами 21 и 22 (еще два на другом торце мембраны) равен нулю. И наоборот, при изгибе устройства в плоскости.
5 образованной его осью и линий, соединяющей тензорезисторы 21 и 22, изгибные деформации зафиксированы тензорезисторами 21 и 22, а разбаланс мостовой схемы 17-20 равен нулю.
0
Таким образом, по соотношению сигналов на этих двух взаимно перпендикулярных схемах можно судить о плоскости действия изгибающего момента, приложен5 ного к устройству. Измерение изгибающих моментов может быть как самостоятельной целью, так и применяться с целью контроля эксцентриситета приложения осевой силы, наличие и величину которого можно оценить по соотношению сигналов в схемах с
тенэорезисторами 17-22 и тем самым повысить точность силомоментного датчика
Формула изобретения
Силомоментный датчик, содержащий горизонтальные и вертикальные упругие элементы в виде перемычек с размещенными на них тензорезисторами, соединенными в мостовые схемы, отличающийся тем, что, с целью повышения точности и расширения функциональных возможностей за счет измерения изгибающего момента, в него введены жесткие фланцы,
между которыми установлены упругие вертикальные перемычки, на нижнем фланце выполнен цилиндрический выступ, вертикальные упругие перемычки связаны с ним через упругие шарниры, а горизонтальный упругий элемент выполнен в виде мембраны, центр которой связан с цилиндрическим выступом, причем по периферии в плоскости мембраны с обеих сторон выполнены кольцевые проточки, при этом введены дополнительные тензорезисторы,установленные на мембране попарно сверху и снизу во взаимно перпендикулярных направлениях и соединенные в мостовые схемы.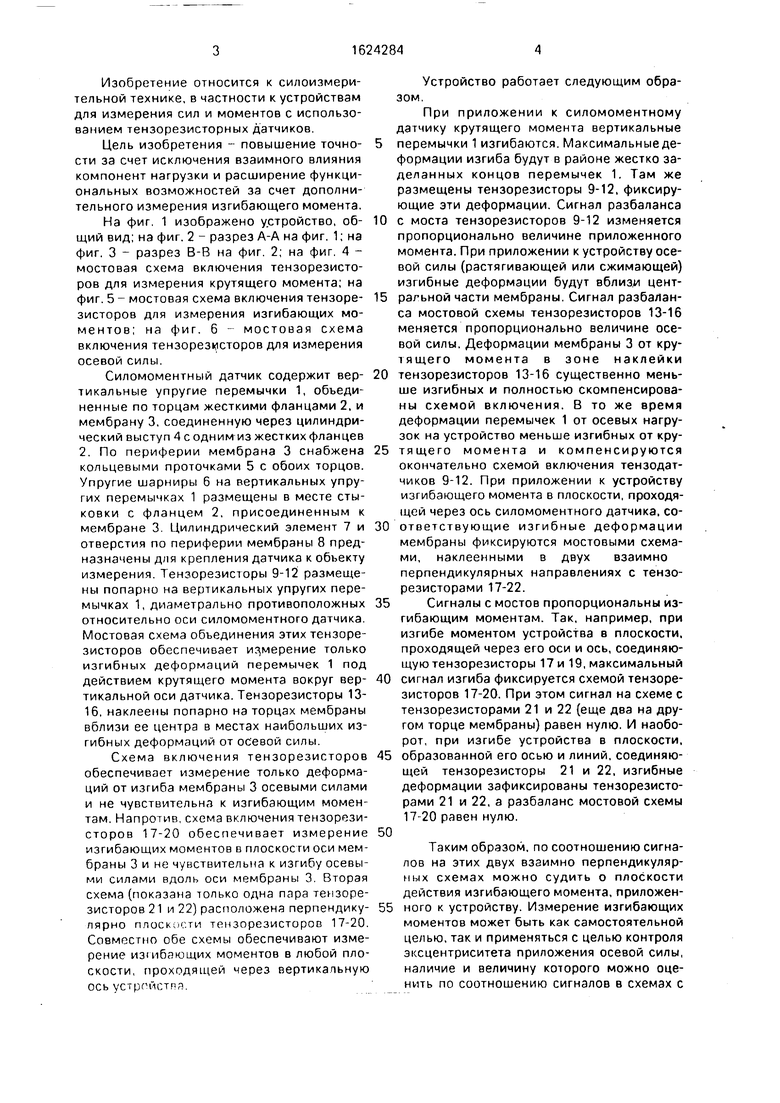
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ДЛЯ СИЛОМОМЕНТНОГО ОЧУВСТВЛЕНИЯ РОБОТОВ | 2006 |
|
RU2306536C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СИЛЫ | 1997 |
|
RU2114406C1 |
| Способ и устройство тензоэлектрического преобразования | 2017 |
|
RU2661456C1 |
| Устройство управления | 1990 |
|
SU1795437A1 |
| Устройство для измерения поперечной нагрузки на брус | 1975 |
|
SU556355A1 |
| Тензорезисторный динамометр осевой силы и крутящего момента | 1974 |
|
SU579548A1 |
| Динамометрический датчик | 1986 |
|
SU1352262A1 |
| Устройство для измерения силы | 1990 |
|
SU1739218A1 |
| Многокомпонентное силоизмерительное устройство | 1990 |
|
SU1760405A1 |
| ТЕНЗОМЕТРИЧЕСКИЙ ДАТЧИК СИЛ | 1973 |
|
SU375500A1 |
Изобретение относится к ci-лпизмрри- тельной технике, в частности к устройствам для измерения сил и моментов с использованием тензорезисюрных датчиков. Цель изобретения - повышение точности за счет исключения взаимного влияния компонент нагрузки и расширение технологических возможностей за счет дополнительного измерения изгибающего момента. При приложении к силомоментному датчику крутящего момента вертикальные тзремыч- ки 1 изгибаются. Максимальные деформации изгиба будут в районе жестко Задала чнчх концов п-фем-.пек 1. Там же размещены тензорезистооы фиксирующие эп1 деформаиии. разбаланса с моста iснзгс.е исторор изменяется пропорцио- нат- о еличине приложенного момента, приложении к устройству осевой сипы деформации будут вблизи цонт- рзль ой чзсти мембран1:,. 1,игна,1 разбзлан ел мостосом ьхемы те нзо рез чего -о в м нметсх: прог|орЦ|Юна.1оНО величине осевой силь Деформации мембраны 3 от кру тящего момента в aoi.e на к лень и тензэрезисторов существенно меньше из- ибнчх и компенсированы схемсй включения. Деформации перемьнек 1 от осевых нлгрузо:-, на устройство меньше изгибных от крутящего момента ,-. конпенс-руются схемой включения тензорезисторов. При приложении к устройству изгибающего момента в плоскости, проходящей через ось силомоментного датчика, соответствующие изгибные деформации фиксируются мостовыми схемами, наклеенными вдзух взаимно пергэндикулярных направлениях с тензо- резисторзми. Сигналы с мостов пропорциональны изгибающим моментам. 6 ил 6-5 Ё О ю 4 Ю 00 ь. Фаг 1
8
Фиг. 2
У/ШШ.
15
16
Фиг.З
-& Uпит &-& Uпит &- 1719
1В
20
Фиг.З
-fi U пит уб- 1316
| УСТРОЙСТВО для УПЛОТНЕНИЯ ЗАТВОРОВ ГИДРОТУРБИН | 0 |
|
SU213505A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ги;:омо- ментные датчики для робототсхнических систем | |||
| Препринт, М, 1984, с.49 | |||
