t1:35
Изобретение относится к силоизме- ительной технике и может быть исользовано для силомоментного чувствления промышленных роботов робототехнических систем различноо назначения.
Цель изобретения - расширение ункциональных возможностей и повышеие надежности.
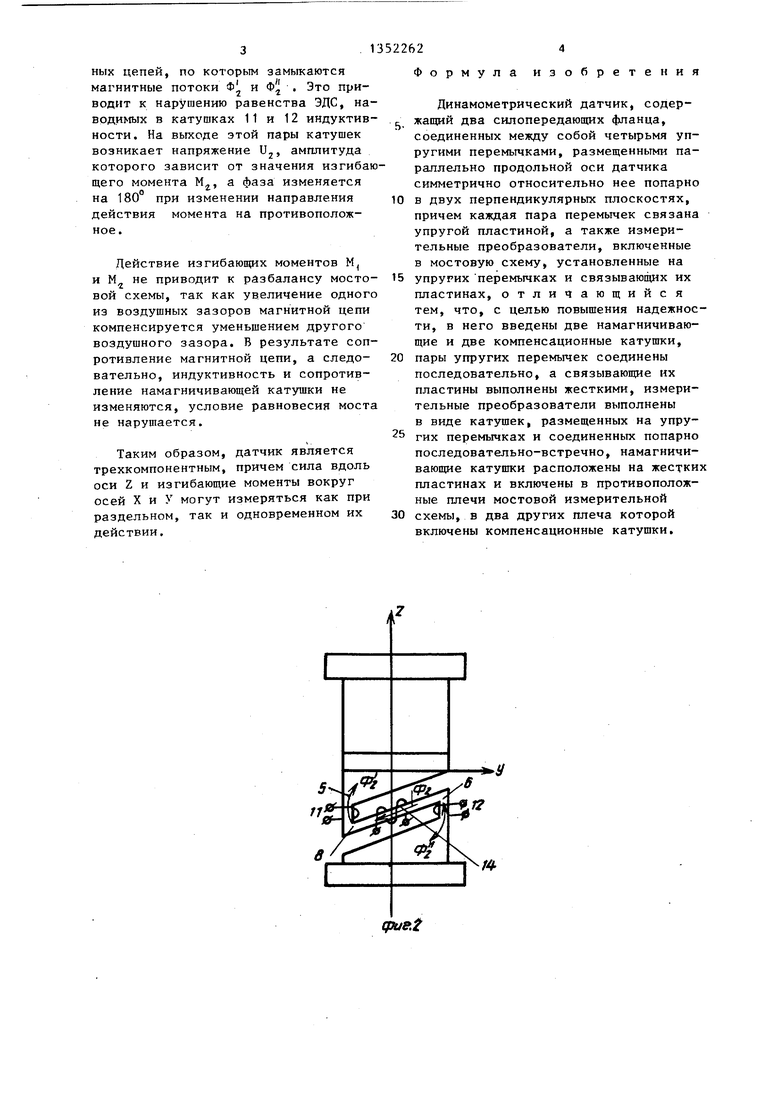
На фиг.1 и 2 изображены две прокции конструкции датчика; на фиг.З- электрическая схема датчика.
Датчик содержит соосно расположенные силопередающие фланцы 1 и 2, соеиненные между собой упругими перемычками 3, 4 и 5, 6, связанными между собой соответственно жетскими . пластинами 7 и 8, измерительные преобразователи 9 и 10, выполненные в виде катушек, размещенных на упругих перемычках 3 и А, и соединенные последовательно-встречно 5 измерительные преобразователи 11 и 12, выполненные также в виде катушек, размещенных на упругих перемычках 5 и 6, и соединенные последовательно-встречно, намагничивающие катушки 13 и 14, располо женные на жестких пластинах 7 и 8, включенные в противоположные плечи измерительной мостовой схемы, два других плеча которой образованы компенсационными катушками 15 и 16.
Упругие перемычки 3-6 расположены параллельно продольной оси датчика Z симметрично относительно нее, .причем упру-гие перемычки 5 и 6 перпендикулярны упругим перемычкам 3 и 4.
Динамометрический датчик работает следующим образом.
При подключении мостовой цепи к источнику переменного тока в жестких пластинах 7 и 8 возникают переменные магнитные потоки Ф и Ф . В отсутствии силы, действующей на датчик вдоль его продольной оси Z, и изгибаювдах моментов вокруг поперечных осей X и У магнитные потоки Ф, и Ф вследствие симметрии магнитной цепи делятся на равные составляющие Ф. Ф1
I II
и ф ф .В катушках 9 и 10 индук- тивности наводятся одинаковые ЭДС. Е, Е, , а в катушках 11 и 12 индуктивности - одинаковые ЭДС. Е Е . В результате последовательно-встречного включения катушек индуктивности ЭДС Е| и Е , , а также ЭДС Е и Е взаимно компенсируются и выходные напряжения и, и и оказываются равными
22
нулю. Мпстс.ная ueuf., в противоположные плечи которой включены намагничивающие катушки 13 и 14, уравновешена и выходное напряжение Uj также
равно нулю.
При появлении силы, действующей вдоль продольной оси Z, происходит деформация датчика. Действие растягивающей силы приводит к увеличению
воздушных зазоров в магнитных цепях, по которым протекают потоки Ф и Ф и их составляющие. В результате магнитное сопротивление этих цепей увеличивается, а индуктивность и полные электрические сопротивления намагничивающих катушек 13 и 14 уменьшаются. Под действием сжимающей силы воздушные зазоры уменьшаются, а индуктивности и полные электрические сопротивления намагничивающих катушек 13 и 14 возрастают. Таким образом, в обоих случаях происходит разбаланс мостовой схемы. В измерительной диагонали появляется напряжение Uj, амплитуда которого зависит от значения силы, действующей вдоль оси Z, а фаза изменяется на 180° при изменении направления силы на противоположное, при этом симметрия магнит
ных цепей, по которым замыкаются магнитные потоки Ф и Ф, , а также Ф
II
и Ф; , не нарушается, поэтому напряжения U;, и Uj не изменяются. При возникновении изгибающего момента М, ,
действующего вокруг оси У, нарушается симметрия магнитных цепей, по которым замыкаются магнитные потоки Ф и Ф , так как воздушный зазор в .одной из цепей уменьшается, а в
другой увеличивается. В результате нарушается равенство ЭДС, наводимых в катушках 9 и 10 индуктивности.
На выходе этой пары катушек появляется напряжение U , амплитуда которого зависит от значения изгибающего момента М,, а фаза изменяет-ся на 180 при изменении направления действия момента на противоположное.
В связи с жесткостью конструкции
датчика симметрия магнитных цепей, по которым протекают магнитные пото- . ки Ф и , под действием изгибающего момента М, не нарушается, напряжение U2 не изменяется.
При возникновении изгибающего момента Mj,действующего вокруг оси X, вследствие: изменения воздушных зазоров наруп1ается симметрия магнитных цепей, по которым замыкаются магнитные потоки Ф1 и ф . Это при21
водит к нарушению равенства ЭДС, наводимых в катушках 11 и 12 индуктивности. На выходе этой пары катушек возникает напряжение U, амплитуда которого зависит от значения изгибающего момента М, а фаза изменяется на 180° при изменении направления
действия ное.
момента на противоположДействие изгибающих моментов М и М не приводит к разбалансу мостовой схемы, так как увеличение одного из воздушных зазоров магнитной цепи компенсируется уменьшением другого воздушного зазора. В результате сопротивление магнитной цепи, а следовательно, индуктивность и сопротивление намагничивающей катушки не изменяются, условие равновесия моста не нарущается.
Таким образом, датчик является трехкомпонентным, причем сила вдоль оси Z и изгибающие моменты вокруг осей X и У могут измеряться как при раздельном, так и одновременном их действии.
1352262
Формула
изобретения
0
5
0
5
Динамометрический датчик, содержащий два силопередающих фланца, соединенных между собой четырьмя упругими перемычками, размещенными параллельно продольной оси датчика симметрично относительно нее попарно в двух перпендикулярных плоскостях, причем каждая пара перемычек связана упругой пластиной, а также измерительные преобразователи, включенные в мостовую схему, установленные на упругих перемычках и связываю1цих их пластинах, отличающийся тем, что, с целью повышения надежности, в него введены две намагничивающие и две компенсационные катушки, пары упругих перемычек соединены последовательно, а связывающие их пластины выполнены жесткими, измерительные преобразователи выполнены в виде катушек, размещенных на упругих перемычках и соединенных попарно последовательно-встречно, намагничивающие катушки расположены на жестких пластинах и включены в противоположные плечи мостовой измерительной 0 схемы, в два других плеча которой включены компенсационные катушки.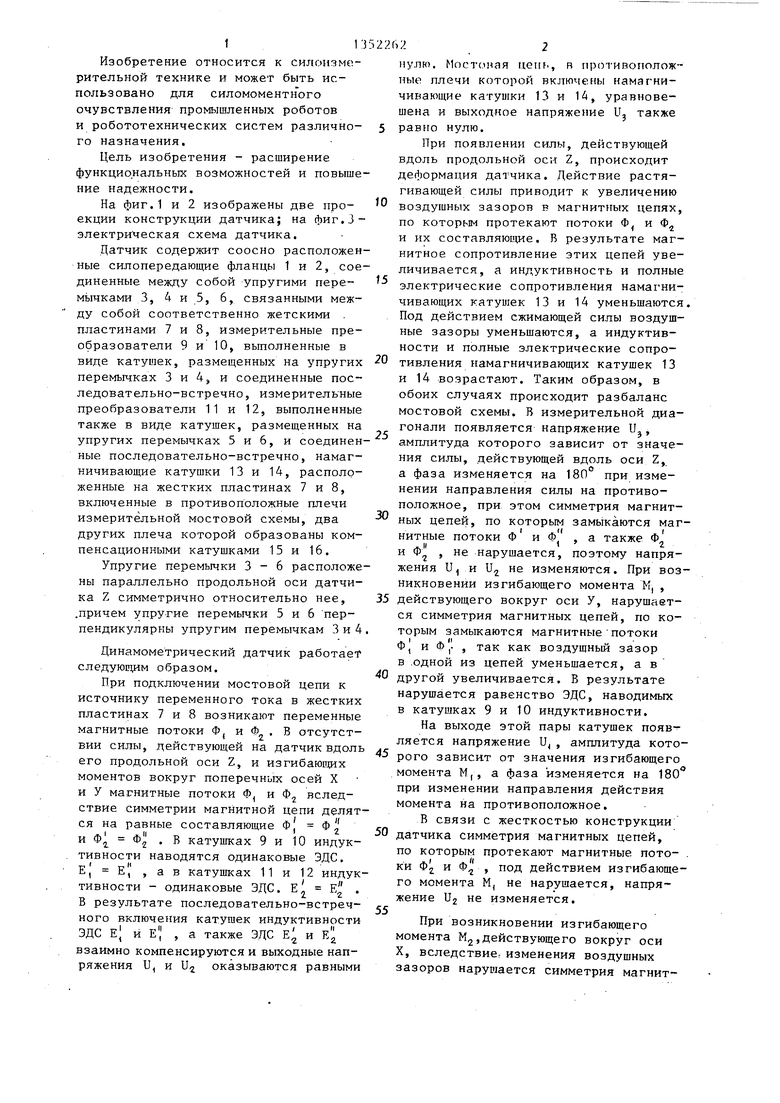
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ДЛЯ СИЛОМОМЕНТНОГО ОЧУВСТВЛЕНИЯ РОБОТОВ | 2006 |
|
RU2306536C1 |
| Устройство для определения положения сварного шва | 1988 |
|
SU1590153A1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |
| ИНДУКТИВНЫЙ ИЗМЕРИТЕЛЬ ИСКРИВЛЕНИЯ ТРУБЧАТОГО КАНАЛА | 2013 |
|
RU2556275C2 |
| УСТРОЙСТВО ЭКСПРЕСС-КОНТРОЛЯ МАГНИТНЫХ ХАРАКТЕРИСТИК ЛИСТОВОЙ ЭЛЕКТРОТЕХНИЧЕСКОЙ СТАЛИ | 2014 |
|
RU2551639C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1993 |
|
RU2028000C1 |
| ГИРОСКОП (ВАРИАНТЫ) | 2011 |
|
RU2460040C1 |
| Устройство измерения крутящего момента вала | 2022 |
|
RU2795384C1 |
| Шестикомпонентные аэродинамические весы | 1961 |
|
SU152117A1 |
| ВИБРАЦИОННЫЙ ГИРОСКОП | 2002 |
|
RU2219495C1 |
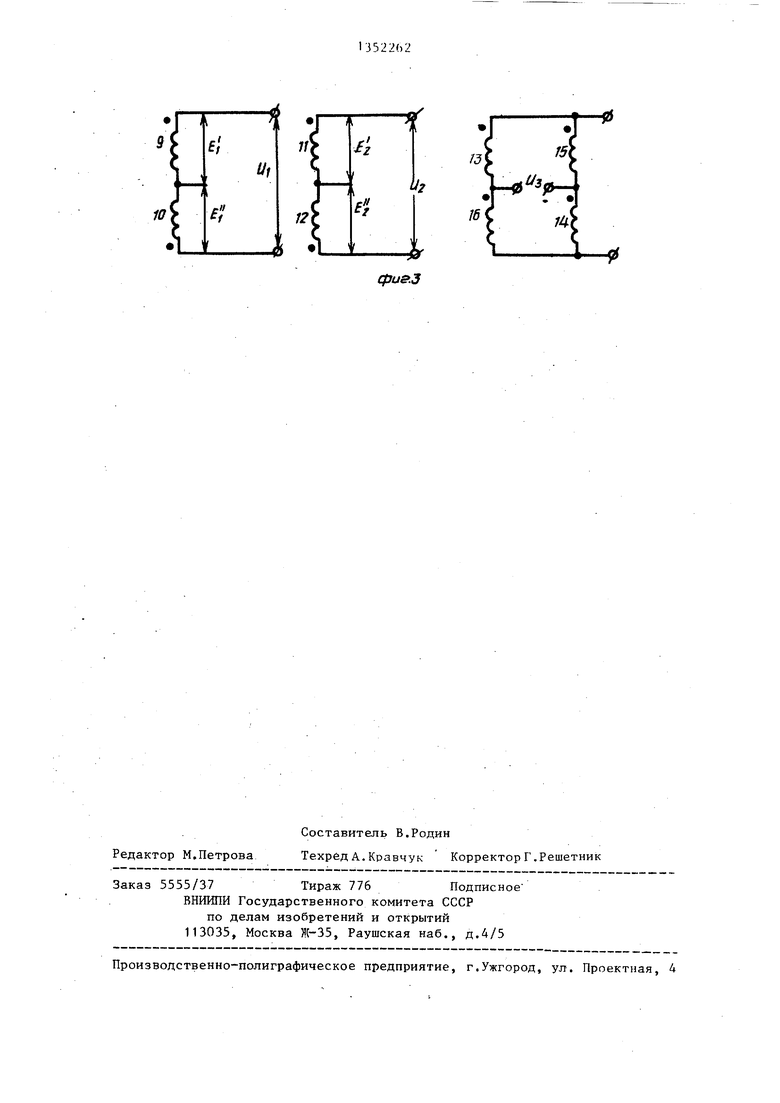
Изобретение может быть использовано для силомоментного очувствления промьшленных роботов. Цель изобретения - расширение функциональных возможностей и повышение надежности. Датчик содержит силопередающие фланцы 1 и 2, соединенные между собой упругими перемычками 3 и 4, связанными между собой жесткой пластинкой 7, измерительные преобразователи 9 и 10, намагничивающую катушку 13. При появлении силы, действующей вдоль продольной оси Z, происходит деформация датчика. Действие растягивающей силы приводит к увеличению воздушных зазоров в магнитных цепях, по которым протекают потоки Ф, и их составляющие. В результате магнитное сопротивление этих цепей увеличивается, а индуктивность и полные электрические сопротивления намагничивающей катущки 13 уменьшаются, Под действием сжимающей силы воздушные зазоры уменьшаются, а индуктивность и сопротивление намагничивающей катущки 13 возрастают, происходит разбаланс моста, В измерительной диагонали появляется напряжение, амгшиту- да которого зависит от значения силы, действующей вдоль оси Z, а фаза изменяется на 180° при изменении направления силы на противоположное. Датчик является трехкомпонентным, причем сила вдоль оси Z и изгибающие моменты вокруг оси X могут измеряться как при раздельном, так и одновременном их действии. 3 ил. SS (Л 00 О1 so 0 05
(puat
16
Редактор М.Петрова
Составитель В.Родин
Техред А.Кравчук КорректорГ.Решетник
Заказ 5555/37Тираж 776 Подписное
ВНИШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул. Проектная, 4
фи&.3
| Силомоментный датчик | 1984 |
|
SU1210072A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Тензометрический динамометр для измерения поперечных моментов и осевой силы | 1978 |
|
SU714187A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
