3. Электропривод пп пп. 1 и 2, отличающийся тем. что преобразователь ток якоря - коэффици ент заполнения содержит инвертор, логический элемент ИЛИ-НЕ, генератор импульсов пилообразной формы, компаратор и интегратор, вход которого образует вход преобразователя, ток якоря - коэффициент заполнения, выход подключен к первому входу компаратора, выход которого соединен с входом сброса триггера второго бло ка синхронизации, выход которого 1 2 подключен к входу генератора импульсов пилообразной формы, выход которого соединен с вторым входом компаратора, выход которого подключен также к одному из входов логического элемента ИЛИ-НЕ, другой вход которого образует второй вход преобразователя ток якоря-коэффициент заполнения, а выход подключен к первому входу импульсного усилителя мощности и к входу инвертора, выход которого соединен с вторым входом импульсного усилителя мощности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой электропривод | 1982 |
|
SU1050077A1 |
| Дискретно-цифровой электропривод | 1985 |
|
SU1350800A1 |
| Электропривод | 1987 |
|
SU1476584A1 |
| МИКРОПРОЦЕССОРНЫЙ ЭЛЕКТРОПРИВОД | 1998 |
|
RU2141164C1 |
| Устройство для управления двигателем постоянного тока | 1983 |
|
SU1104630A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПУСКОМ И ОСТАНОВОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2011 |
|
RU2454784C1 |
| Электропривод постоянного тока | 1983 |
|
SU1102001A1 |
| МОЩНЫЙ ИМПУЛЬСНО-ПЕРИОДИЧЕСКИЙ ЛАЗЕР С НЕУСТОЙЧИВЫМ РЕЗОНАТОРОМ | 1985 |
|
SU1839868A1 |
| ЦИФРОВОЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С ДВОЙНОЙ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 1992 |
|
RU2037263C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОТКАЗОВ В ШАГОВОМ ЭЛЕКТРОПРИВОДЕ | 1991 |
|
RU2032265C1 |
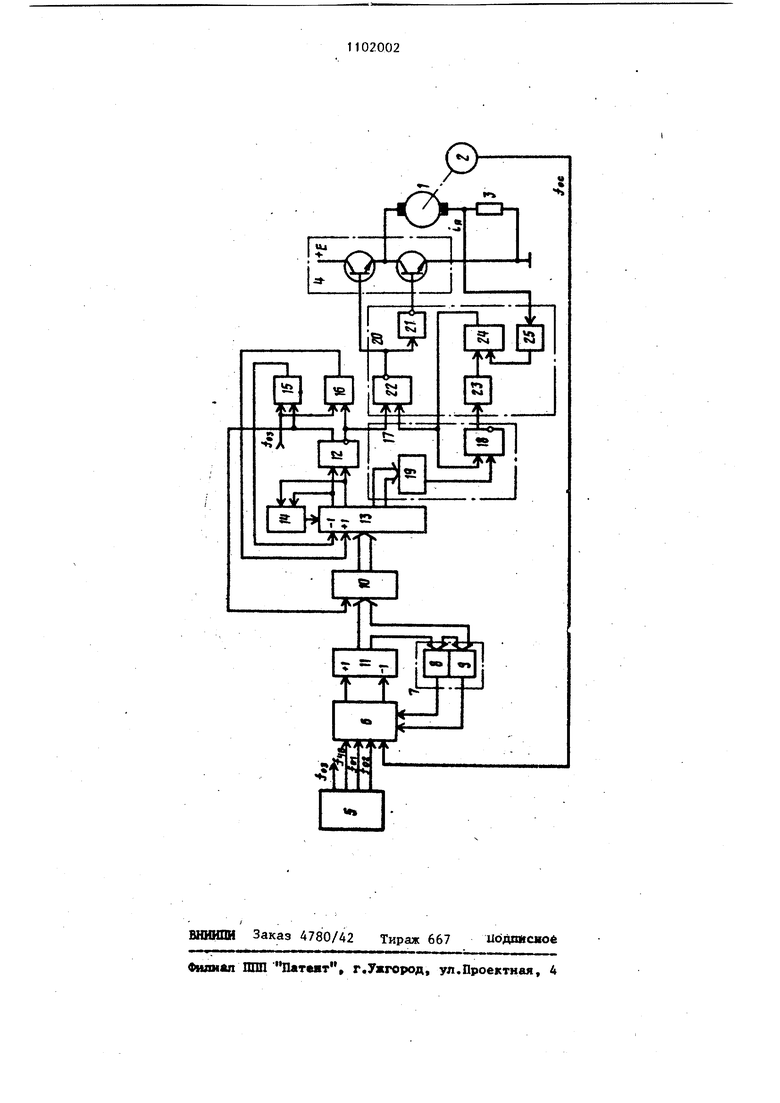
1. ЦИФРОВОЙ ЭЛЕКТРОПРИВОД, содержащий двигатель постоянного тока с импульсным датчиком частоты вращения, подкЛюченньй к импульсному усилителю мощности, блок тактовых частот, первый реверсивный счетчик, . разрядные выходы которого соединены с входами блока ограничения и регистра, первый триггер, выходами подключенный к первым входам двух логических элементов И, выходы которьгх соединены соответственно с входами сложения и вычитания второго реверсивного счетчика, логический элемент ИЛИ, блок синхронизации, к входам которого подключены три выхода блока тактовых частот, выход импульсного датчика частоты вращения и выходы блока ограничения, выходы блока синхронизации соединены с входами первого реверсивного счетчика, входы логического элемента ИЛИ подключены к вьЬсодам переноса и заема второго реверсивного счетчика, подключенным также к установочным входам первого триггера, прямой выход которого соединен со стробирующим входом регистра, входы которого и выход логического элемента ИЛИ соединены соответственно с входами параллельной записи и стробирующим входом второго реверсивного счетчика, причем четвертьй выход блока тактовых частот подключен к вторым входам двух логических элементов И, о т -г личающийся тем, что, с целью повышения качества и точное ти регулирования, в него дополнительно введены датчик тока якоря электродвигателя, преобразователь Ток якоря - коэффициент заполнения и второй блок синхронизации, разрядные входы которого соединены с в разрядными выходами второго реверсивного счетчика, другой вход второ го блока синхронизации подключен к первому выходу преобразователя ток якоря - коэффициент заполнения, два других выхода которого соединены с входами импульсного усилителя мощности, первый вход преобразователя, ток якоря - коэффициент заполнения подключен к выходу датчика тока якоря электродвигателя, второй вход соединен с инверсным выходом первого триггера, а третий вход - с выходом второго блока синхронизации. 2. Электропривод по п. 1, о т личающийся тем, что,второй блок синхронизации содержит триггер и дешифратор единицы младшего разряда, разрядные входы которого образуют входы второго блока синхронизации, а выход подключен к установочному входу триггера, вход сброса которого и прямой выход образуют соответственно другой вход и выход второго блока синхронизации.
Блок ограничения предотвращает опрокидывание первого реверсивного счетчика 11 при больпшх или длительных рассогласованиях между f , ,.
Происходит это следующим образом. Если fj f JJC и первый реверсивный счетчик 11 принимает состояние Все единицы, то срабатьшает дешифратор 8 единиц,выходной сигнад которого блокирует поступление - импульсов fa на суммирующий вход первого реверсивного счетчика 11. При этом импульсы fgf продолжают поступать на его вычитающий вход вплоть до входа в линейную зону работы. После этого сигнал блокировки снимается. Аналогичные процессы происходят и при соотношении ,p с той лишь разницей, что первый реверсивный счетчик 11 принимает состояние Все нули и срабатывает дешифратор 9 нулей , блокирующий выходным сигналом поступление импульсов на вычитающий вход первого реверсивног счетчика 11.
Код регистра 10 преобразуется
В широтно-импульсный сигнал (период постоянный, коэффициент заполнения переменный). Это осуществляется еле.дующим образом. При опрокидывании триггера 12 в единичное состояние через логический элемент ИЛИ 14 разрешается перепись кода регистра 10 во второй реверсивный счетчик 13, а импульсы частоты поступают через логический элемент И 15 на вычитаюпщй вход.второго реверсивного счетчика 13. Процесс уменьшения содержимого второго реверсивного счетчика 13 продолжается до его обнуления и появления импульса заема. Последний вызывает установку триггера 12 в нулевое состояние и вновь перепись кода регистра 10 во второй реверсивный счетчик 13. Теперь открыт логический элемент И 16 и импульсы частоты f .JJ поступают на суммирующий вход второго реверсивного счетчика 13 до его заполнения и появления импульса переноса, устанавливающего триггер 12 в единичное состряние. Таким образом, на выхода триггера 12 имеет место широтноимпульсный сигнал с периодом,.опредляемым частотой и емкостью второго реверсивного счетчика 13. Период выбирается так, чтобы двигатель 1 служил фильтром нижних частот (для
двигателей мощностью единицы-десят,ки киловатт частота модуляции единицы-десятки -килогерц).
Так как длительность единичного состояния триггера 12 пропорциональна коду регистра 10, то и длительность пбдключения якорной цепи двигателя 1 к источнику +Е также пропорциональна этой величине.
Поскольку импульсы частоты f, оэ разнесены 3 0 времени, то съем кода первого реверсивного счетчика 11 в регистр 10 проходит только в моменты стационарного состояния первого реверсивного счетчика 11.
Однако, поскольку двигатель 1 представляется периодическим звеном с двумя инерционностями, то цифровой электропривод, в закон управления которого входит только интегральная составляющая сигнала ошибки между fj и fос ив обеспечивает заданных показателей точности и качества регулирования. Это объясняется тем, что логарифмическая частотная характеристика ЛЧХ регулятора пересекает ось частот под наклоном 40 Б/дек, что не обеспечивает запаса устойчивости системы по амплитуде и по фазе.
Для обеспечения заданных показателей качества и устойчивости системы необходимо использовать ПИ-регулятор, т.е. ввести в закон регулирования пропорциональную (П) составляю щую. Последнее осуществляется введением сигнала обратной связи по току якоря двигателя, который является дифференциальной составляющей выходного сигнала, в данном случае, частоты вращения двигателя 1. Проинтегрировав производную от выходной координаты, получим пропорциональную составляющую закона регулирования, которая затем, просуммировавшись с интегральной составляющей, обеспечит пи-структуру цифрового электро привода.
Вьшесказанное осуществляется следующим образом.
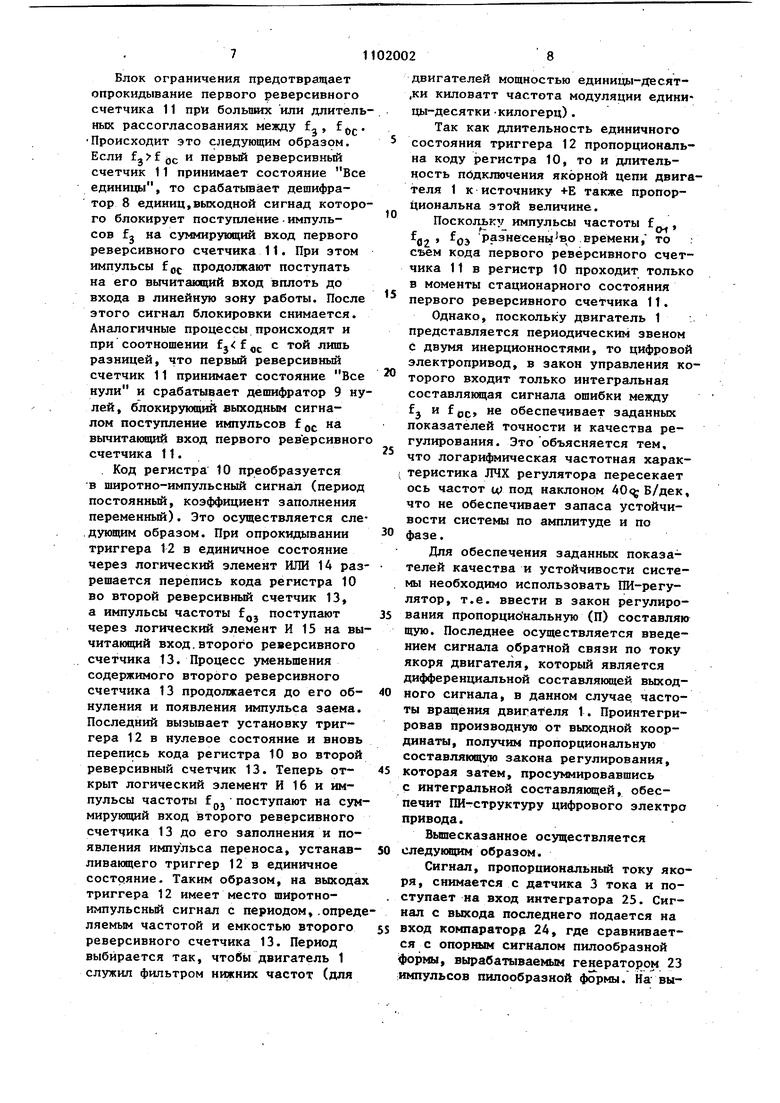
Сигнал, пропорциональный току якоря, снимается с датчика 3 тока и поступает на вход интегратора 25. Сигнал с выхода последнего подается на ход компаратора 24, где сравнивается с опорным сигналом пилообразной ормы, вырабатываемым генераторо1м 23 мпульсов пилообразной формы. На выходе компаратора 24 образуется тирот но-нмпульсный модулированный сигнал который, суммируясь на логическом элементе ИЛИ-НЕ 22 с широтно-импульс ным сигналом, присутствующим на выходе триггера 12, управляет работой импульсного усилителя 4 мощное- ти. При этом второй блок 17 синхрони Заоди осуществляет жесткую привязку переднего фронта импульсов с выхода компаратора 24 (П-составляющая закона регулирования) с задним фронтом импульсов с выхода триггера 12 (Й-составляющая). Привязка осуществляется . Следующим образом.. Дешифра тором 19 единицы младшего разряда фиксируется момент наличия единицы в младщем разряде второго реверсивного счетчика 13, при исчезновении которой происходит обнуление последнего и формирование заднего фронта широтно-модулированного импульса И-составляющей закона регулирования При этом выходной сигнал дешифратора 19 единицы младшего разряда устанавливает триггер 18 в нулевое состояние. Последнее инициирует запуск генератора 23 ш-тульсов пилообразной формы и появление именно в этот момент переднего фронта широтно-модулированного импульса П-составляющей. закона регулирования на выходе компаратора 24 и соответственно на входе логического элемента ИЛИ-НЕ. Таким образом, момент окончания заднего фронта широтно-модулированного импульса И-составляющей закона регулирования (с выхода триггера 12) совпадает с началом переднего фронта широтно-модулированного импульса П-составляющей. При этом время суммарного импульса управления Гп+Г „ где . время импульса И-составляющей, f - время импульса П-составляющей закона регулирования. Фиксация дешифратором 19 единицы младшего разряда наличия импульса именно на младшем разряде второго реверсивного счетчика 13 обуславливается необходимостью скомпенсировать внутренние задержки преобразователя ток якоря - коэффициент заполнения 20. Таким образом, предлагаемый цифровой электропривод обеспечивает повьше- ние качества и точности регулирования.
РЗ Щ
F Y L-4..4-J
u u
€
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3950628, кл | |||
| Способ изготовления фасонных резцов для зуборезных фрез | 1921 |
|
SU318A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 3473365/24-07, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
