(Л
С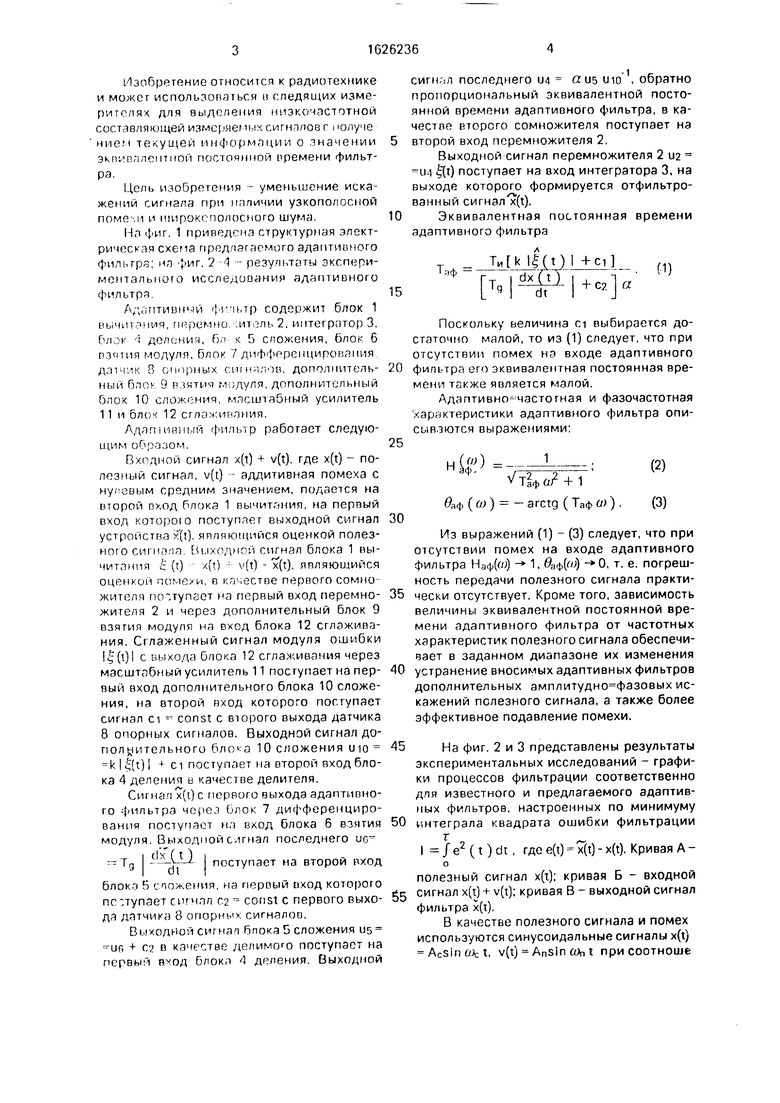

| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный фильтр | 1986 |
|
SU1374408A1 |
| Адаптивный фильтр | 1988 |
|
SU1522382A1 |
| Адаптивный регулятор | 1987 |
|
SU1432459A1 |
| Адаптивный демодулятор дискретных частотно-модулированных сигналов | 1979 |
|
SU1102051A1 |
| Адаптивный регулятор | 1982 |
|
SU1076873A1 |
| МНОГОЛУЧЕВАЯ АДАПТИВННАЯ АНТЕННАЯ РЕШЕТКА | 1983 |
|
SU1840570A1 |
| Адаптивный корректор межсимвольных искажений | 1983 |
|
SU1121784A2 |
| АДАПТИВНАЯ АНТЕННАЯ РЕШЕТКА | 1986 |
|
SU1840427A1 |
| Система автоматического регулирования одностадийным циклом мокрого измельчения | 1982 |
|
SU1255208A1 |
| Устройство приема сигналов с частотным разделением каналов | 1988 |
|
SU1626410A1 |

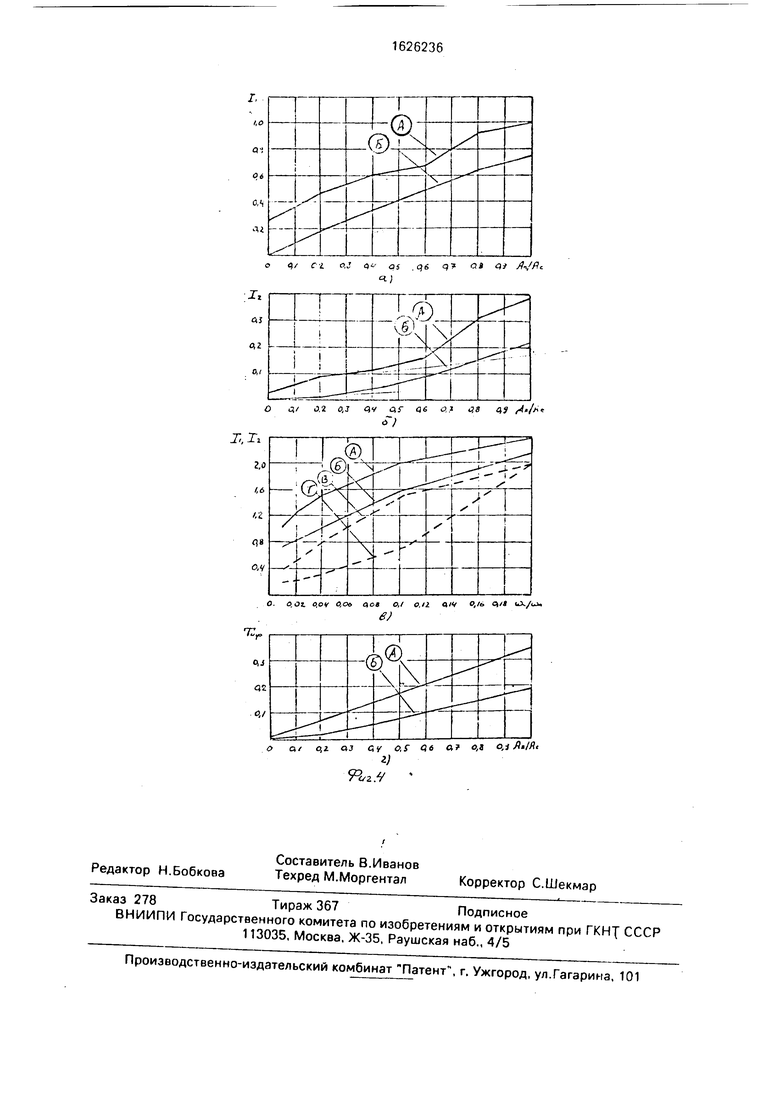
Изобретение относится к радиотехнике. Цель изобретения - уменьшение искаже- Hf.« i -.гнала при наличии узкополосной помехи и широкополосного шума. Адаптивный филыр содержит блок 1 вычитания, пере- множигель 2, интегратор 3, б:;ок 4 деления, блок 5 сложения, блок 6 взятия модуля, блок 7 дифференцирования, датчик 8 опорных сигналов, дополнительный блок 9 езятия модуля, дополнитепьнь й блок 10 сложения, масштабный усилитель Ч, блок 12 С(лгжи- вания Поставленная цегь достигается путем регулирования эквивалентной постоянной времени адаптивного фильтра при изменении соотношения сигнал/помеха на его входе при условии сохранения постоянным выходного отношения сигнал/помеха. 4 ил.
О
ho
о ю
00
о
&/г. 1
Изобретение относится к радиотехнике и может использоваться в следящих измерителях для выделения низкочастотной составляющей изменяемых сип-плов г i юлуче нием те.ущей информации о значении эквивалентной постоянной времени фильтра.
Цель изобретения - уменьшение искажений сигнала при наличии узкополосной поме и и широкополосного шума.
На фиг. 1 приведена структурная электрическая схема предлагаемого адаптивного фильтра; мя фиг. 2 3 - результаты экспериментальною исследования адаптивного фильтра
Адмптивнчи содержит блок 1 РЫЧИТ т|ич, прремно m эль 2, интегратор 3, fvijK 3 деления, Г)/ 5 сложения, блок 6 пэчтия модуля, блок 7 дифференцирования Д31Ч.1К 8 спорных (1ннм,, дополнительный бло 9 в знтия м дуля, дополнительный блок 10 сложения, масштабный усилитель 11 и бло 12 сглач пнания.
Адап ивныи фильтр работает следующим образом.
Входной сигнал x(t) + v(t), где x(t) - полезный сигнал, v(t) - аддитивная помеха с ну.-овым средним значением, подается на второй вход блока 1 вычитания, на первый вход которою поступает выходной сигнал устройства y(t). являющийся оценкой полезного Выходнги сигнал блока 1 вычитания Ј (t) () v(t) - x(t), являющийся оценкой помо/и, о качестве первого сомно жителч поступает на первый вход перемножителя 2 и через дополнительный блок 9 взятия модуля на вход блока 12 сглаживания. Сглаженный сигнал модуля ошибки lЈ(t)l с выхода блока 12 сглаживания через масштабный усилитель 11 поступает на первый вход дополнительного блока 10 сложения, на второй вход которого поступает сигнал ci const с второго выхода датчика 8 опорных сигналов. Выходной сигнал дополнительного бло а 10 сложения то k|Ј.(t)| + ci поступает на второй вход блока 4 деления в качестве делителя.
Сигнап Ј(t)c первого выхода адаптивного фильтра через Ьгок 7 дифференцирования поступает на вход блока 6 взятия модуля. Выходной сигнал последнего ис
CCll
dt
поступает на второй вход
блока В сложения, на первый вход которого пс:тупает сигнал Г2 const с первого выхода датчика 8 опорны сигналов.
Выходной сигнал блока 5 сложения U5 ufi + с в качестве делимого поступает на первый блока 4 деления. Выходной
0
сиги,(Л последнего IM a us , обратно пропорциональный эквивалентной постоянной времени адаптивного фильтра, в качестве второго сомножителя поступает на второй вход перемножителя 2.
Выходной сигнал перемножителя 2 U2 iM 4(t) поступает на вход интегратора 3, на выходе которого формируется отфильтрованный сигналит).
Эквивалентная постоянная времени адаптивного фильтра
т
Ьф-- -Гг
dt
+ С1
+ с
. (1)
а
Поскольку величина ci выбирается достаточно малой, то из (1) следует, что при отсутствии помех на входе адаптивного фильтра его эквивалентная постоянная времени также является малой.
Адаптивно частотная и фазочастотная характеристики адаптивного фильтра описываются выражениями:
о;) 1
Н
ф,
Т1фй + 1 0Яф (ш ) - arctg (Таф ft)) .
(2) (3)
Из выражений (1) - (3) следует, что при отсутствии помех на входе адаптивного фильтра Наф(о;) - 1, ваф((о) , т. е. погрешность передачи полезного сигнала практически отсутствует. Кроме того, зависимость величины эквивалентной постоянной времени адаптивного фильтра от частотных характеристик полезного сигнала обеспечивает в заданном диапазоне их изменения
устранение вносимых адаптивных фильтров дополнительных амплитудно фазовых искажений полезного сигнала, а также более эффективное подавление помехи.
На фиг. 2 и 3 представлены результаты
экспериментальных исследований - графики процессов фильтрации соответственно для известного и предлагаемого адаптивных фильтров, настроенных по минимуму интеграла квадрата ошибки фильтрации
т
I / е2 (t ) dt, где e(t) - 7(t) - x(t). Кривая А о
полезный сигнал x(t); кривая Б - входной сигнал x(t) + v(t); кривая В - выходной сигнал фильтра x(t).
В качестве полезного сигнала и помех используются синусоидальные сигналы x(t) AcsinuA:t, v(t) AnSin ftAi t присоотноше
нии частот ron/r/jfc 100 и амплитуд АП/АС -- -1. Применение для анализа работы ров гармонических сигналов обусловлено равенством гармонических и статистуче- ских коэффициентов передачи нелинейных элементов при гармонических воздействиях,
Для сравнительной оцэнки vr.4,CTt фильтрации в известном и прсдлл.аемом адаптивных фипьтрэх испопьзуюгся поката тели интеграла модуля ошибки фильтр чции и и интеграла квадрата ошибки фильтрации
Г2Г2
h / | e(t) I di: I2 / e
iП
-it
Диаграммы изменения нормированного показателя h (Фиг 4 а) припег.ны в зависимости от соотношения амплитуд по- сигнала и помехи Ac/An, где кривая А - для известного адзпгивмого филыра, кривая В - для предлагаемого ад птивног фильтра, при uJh/Mt 100, и аналогичные диаграммы для нормированного показа геля г (фиг. 46).
Диаграммы изменения нормированных показателей h и 2 (фиг. 4в) приведены в зависимости от соотношения частот полезного сигнала и помехи аь/аь при Ac/An 1, где кривые А и Б - диаграммы изменения показателя IL кривые В и Г - показателя J2 для известного и предлагаемого адаптивных фильтров соответственно.
Диаграммы изменения эквивалентных постоянных времени, Таф (фиг. 4г) приведены в зависимости от соотношения амплитуд полезного сигнала и помехи АС/АП при ftAi/ftJt 100.
Предлагаемый адаптивный фильтр обеспечивает лучшее по сравнению с известным качество фильтрации во всех диапазонах изменения амплитудных и частотных характеристик полезного сигнала и помех
при больше,-1 диапт онс и 1мг не И . г лентнои постоянной времени. При этом HL требуется знания априорной информ ци ч характеристиках кй -юмех, TaL П -.
ситцев. Наличие в предлагаемом Р гь тмя- ном фильтре дополнитпльно1о вылодт, :т котором формир тся , ратио гро- опциональный экрчр.чнен н й Б( i.n, с1 оспеи вает ви - мож1 ос. л пользования предла аемого эдзпгиььогэ фи/ьтра непосредственно в конт- г-е ад.т1- гичниго рс упирогачий(но показано)
Формугаилг-Рре ения
Адаптивный фи 1ьтр, .п сожащий бло , 5лпк взятия -оцуло, масштаб нь й усилитель бгюк сложения, блок депе- ж я 1 инте ратор, выход лопого соединен
с входе, 1 бюка вычитания и яг-лче1 ся ЕГ . см адаптирного фильтра входом которого является отсрой оход блока БЫЧИ- ; чни э г л и ч ю и: и с я тем, что, с целы, V- C ь чения исожении сигнала при нами
Ч1П1 уз-ополосной помехи и ш рокоголсс- ного шумя, введенч пьрем южит ь, блек дифференцирования, логюлнитегьнь и Ьпок сложения, дшолните ьный Злок зят - ч модуля, блок сглаживания и датчик опорных
сигналов, при этом выход блокч вычитав я через пос/ б-АСоательмэ соединенные пе- ремножитель, интегратор, блок цировэния, Олок взятия модуля и блох слежения соединен с пррзмм входом Ьлок.т
деления, выход блока вычитания через последовательно соединенные дополнитепь- ный блок взятия модуля, блок СГЛЗЖИЁЗНИЯ, масштабный усилитель и дополнительный блок сложения соединен с вторым входом
блока деления, выход которого соединен с вторым входом перемножителя и является дополнительным выходом адаптивного фильтра, а первый и второй выходы датчика опорных сигналоз соединены с вторыми входами соответственно блока сложения и до полнительного блока сложения.
Ј
-О
ГО
о о,/ 0,1 QJ GY о.г Q6 о о,г о,1 At/fit
2)
.V
| Управляемый фильтр | 1980 |
|
SU944080A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Адаптивный фильтр | 1986 |
|
SU1374408A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
