Изобретение относится к машино- riроению, я именно к ниэконапорным чоздушным турбинам дпя преобразования волновой -энергии в механическую в установках типа столба Масуды.
Цель изобретения - упрощение из- готовпения и снижение металлоемкости конструкции направляющего аппарата.
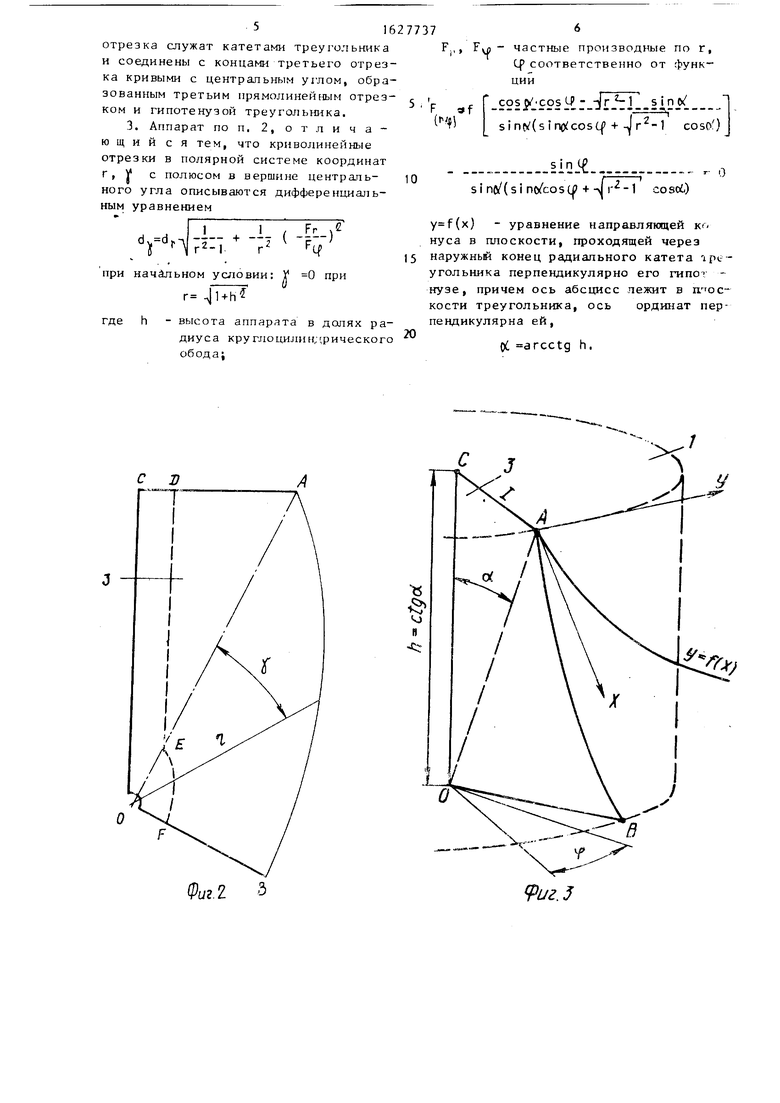
На фиг. 1 представлен направляю- щий аппарат, вид в изометрии; на фиг. 2 - плоская развертка лопатки н полярной системе координат на ко- орой сплошными линиями представлены юпатки при нулевом диаметре внуг- реннего обода, пунктирной линией DEF показана певая граница лопатки при конечном диаметре внутреннего обоца; на фиг. j - i, ч метрическое изображение лопатки с указанием вспомогател -- ннх систем координат.
Направляющий аппарат состоит из Fiip/жного и внутреннего цилиндричес- i их об щов 1 и 2, между которыми рас- I лопатки 3. Каждая из послед- HI- mp.i-joBiH-i шюским прямоугольным треугольником ADE, плавно сопряженным
i u г ью конической поверхности АОВ, if п чки 3 жестко закреплена на внут- ti 1нем ободе 2 по линии DEF и имеет тмопинеиные радиальные кромки AD и 3F, Плоский прямоугольный треугольник А9Е сопряжен с конической поверхностью, расположенной между образующими АО и ВО, лежащими в радиальных плоскостях направляющего аппарата, гак что на его оси лежит вершина 0 ко гическон поверхности,
Ппоская разиертча лопатки 3 огра- ичена катетами ED и АО прямоугольно- LO 1реуголыгика ADE, прямолинейным
грезком BF и кривыми EF и АВ, с центральным углом у н5ежду отрезком BF и гипотенузой AF треугольника.
Построение плоской развертки ло- татки 3 производится по следующим формулам, обеспечивающим прилегание границ лопатки к наружному 1 и внутреннему 2 ободам и плавное сопряжение плоской и конической частей лопатки,
Криволинейные отрезки EF и АВ в полярной системе координат (г, jf ) с полюсом в вершине центрального угла описываются дифференциальным уравнением
1- ь rz
1 ( „LI)
2 F
rlГц
при начальном усаовии f 0 при
,
тле h - высота аппарата в цолях радиуса цилиндрик, ск п о об ода f Fp , Fy,- частные производные по г t J соответс i венно от нк,ми
cosc/ costf - -irf;1.J sjnfy 1
f- - si no/ (s intx- cus i- coso/)
sin M3
COS if
1
COS
- 0
oi)
|1ап1 авг1яющая конусе- в , проходящей через наружный конец ради- апьного катета i pe i отьн са ЛОС п р- пендик /ярн его inntuMiyie, ятжмва- стся ;.чнением y-fix) Причем ось
IP/ HI IJ ЧЦПГлОС1Ч Г) .i I НШч 1 ОСЬ
у перк гпнч лярьа ч.
YJ ол между осью ОС апаерата и линией АС; сопряжения итог кою ipiVMini- никя с конической поь.--охностыо опнсы- я го мнением Ct{ -auctg h
Ислчд :ьги поток, ии(чоп;ии направле- 1;че 4, pa зворачиБиетс я конической поверхностью каждой лопатки и выходит из аппарата в направлениях 5, тельгых к повсрхнс сJ ни ьинусов у ниж- )1Их кромок, под угпом Л к плоскости поперечного сечения аппарата.
Формула и обратс н и я
I Направляющий аппарат «и .шорной гючдушной гурби, ньлн чающии на- р жныи и BtryiaeHHurt цилчндр чес. пб гды и раг:положенные междту ьм ш лгш-и и, о т л и ч а ю и и и с я ч ем, i го с пел ью уг- рощеш Н изготовления ь .. ни я ие i а т - чоемкос тч, каждая из лопчгок выиоан иа из лис оного материала л виде, плен кого прямоу г ольного Tpeyi n щгика , сопряженного с поверхностью . Oiryca, вои- шина которого лежит ча оси аппарата, крайняч образующая совпадает с. гипотенузой треугольника, вторая крайняя образующая направлена по радиусу аппарата, один из катетов треугольника (жестко закреплен на внутреннем ободе, а другой катет направлен по радиусу аппарата.
2. Аппарат но п, , отличаю щий с я тем, что ипоская фигура ртч вертки .ьопатки огрэш-гчена ирпмо линеЙ1г-,1мц и двумя коивштинейными зг- ме КлЬ1ч, при этом два прчм ;чи.чейт{чх
516
отрезка служат катетами треугольника и соединены с концами третьего отрезка кривыми с центральным углом, образованным третьим прямолинейным отрезком и гипотенузой треугольника.
3. Аппарат по п. 2, о т ли чающийся тем, что криволинейные отрезки в полярной системе координат г , У с полюсом в вершине центрального угла описываются дифференциальным уравнением
1
Fr
Л + г ( Г
Г2 |р2Fg,
начальном условии: Y 0 при г -jUhT
h - высота аппарата в долях радиуса кру глоцшшн,;рического обода;
77376
F,. Fu частные производные по г,
5,г,
С-Р соответственно от функции
F г I -Ј9iK. S°§i.I- JЈ-ZlJ--5i.OX.
sinc CsirHXcosCf + -Jr2-1 coso )J
10
sin (P
.„ 1---„, r Q
si nO/(si nc/cos(| + - гг-1 coso6)
(x) - уравнение направляющей к« нуса в плоскости, проходящей через наружный конец радиального катета ipc угольника перпендикулярно его гипо нузе, причем ось абсцисс тежит в плоскости треугольника, ось ординат перпендикулярна ей,
ОС arcctg h.
| название | год | авторы | номер документа |
|---|---|---|---|
| Наглядное пособие Поповых для демонстрации действий над векторами | 1984 |
|
SU1224814A1 |
| КОНСТРУКТОР БЫСТРОВОЗВОДИМЫХ СБОРНО-РАЗБОРНЫХ КАРКАСОВ ВОЛНООБРАЗНЫХ ОБОЛОЧЕК ПЕРЕНОСА | 2014 |
|
RU2573142C1 |
| Осевой турбинный двигатель | 1926 |
|
SU30207A1 |
| СПОСОБЫ ДЛЯ ГРАФИЧЕСКОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОКРУЖНОСТИ И УСТРОЙСТВА ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2154805C2 |
| Молекулярный вакуумный насос | 1990 |
|
SU1781463A1 |
| УСТРОЙСТВО ДЛЯ ФИКСИРОВАНИЯ ЭЛЕМЕНТОВ КОРНЕВОЙ СИСТЕМЫ РАСТЕНИЯ | 1994 |
|
RU2081554C1 |
| СПОСОБ ИЗМЕРЕНИЯ НЕСООСНОСТИ ВАЛОВ | 2009 |
|
RU2424491C1 |
| Эллипсометрический способ дефектоскопии | 1989 |
|
SU1714479A1 |
| КОНСТРУКТОР БЫСТРОВОЗВОДИМЫХ СБОРНО-РАЗБОРНЫХ СООРУЖЕНИЙ В ФОРМЕ ВОЛНООБРАЗНЫХ ОБОЛОЧЕК ВРАЩЕНИЯ | 2014 |
|
RU2573138C1 |
| Конструктор быстровозводимых сборно-разборных сооружений в форме сферических оболочек | 2016 |
|
RU2617657C1 |
Изобретение позволяет снизить металлоемкость конструкции направляющего аппарата при упрощении .технологии его изготовления. Аппарат включает внешний и внутренний цилиндрические ободы 1, 2, между которыми жестко закреплены лопатки 3 из листового материала, образованные плавным сопряжением по гипотенузе плоского прямоугольного треугольника с конической поверхностью. Формулы для расчета плоской развертки лопатки приведены в тексте описания изобретения. 3 ил. . (Л о to J 1 со J Фие.1
С V
| Направляющий аппарат турбомашины | 1982 |
|
SU1089283A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
