лей. Для определения технического состояния механизма подъема экскаватора с помощью переключателей 13- 16 устанавливают такой режим, при котором обмотка возбуждения одного из ЭД подключается непосредственно к ИПТ 7, а обмотка возбуждения другого ЭД лод298544
ключается к ИПТ 7 через резистор 17. При этом магнитные потоки указанных ( обмоток возбуждения направлены таким образом, чтобы моменты на валу ЭД 2 и 3 были направлены встречно. Затем режимы работы ЭД 2 и 3 меняются. 2 ил.
Г5
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для определения технического состояния многодвигательного механизма подъема одноковшового экскаватора | 1989 |
|
SU1723483A1 |
| Способ определения оптимального технического состояния механизмов многодвигательного одноковшового экскаватора и стенд для его осуществления | 1990 |
|
SU1774008A1 |
| УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ ЛАБОРАТОРНЫХ РАБОТ ПО ЭЛЕКТРОТЕХНИКЕ | 1990 |
|
RU2030791C1 |
| Устройство для автоматического регулирования режимов реактивной мощности узла с резкопеременной нагрузкой синхронного двигателя | 1990 |
|
SU1757013A1 |
| Устройство для подачи сварочной проволоки | 1985 |
|
SU1269937A1 |
| Устройство для двухзонного регулирования скорости многодвигательного электропривода | 1980 |
|
SU875570A1 |
| Электропривод подъема экскаватора с аварийным торможением | 1989 |
|
SU1686675A1 |
| Рабочее оборудование роторного экскаватора | 1989 |
|
SU1680880A1 |
| Реверсивный электропривод | 1990 |
|
SU1705996A1 |
| Электропривод постоянного тока | 1978 |
|
SU748756A2 |
Изобретение относится к автоматизации управления механизмами одноковшового экскаватора. Цель - оперативное и достоверное опреде-- ление технического состояния механизма подъема экскаватора непосредственно в условиях производства за счет возможности изменения режимов работы электродвигателей (ЭД) привода подъема. Электропривод механизма подъема экскаватора состоит из генератора 1, ЭД 2 и 3 с обмотками возбуждения 18 и 19, регулятора 4, управляющего обмоткой возбуждения 5 генератора 1, измерительных блоков 6, 8 и 10, источника постоянного тока (ИПТ) 7, нагрузки 9, тахогенератора 11, токоограничивающего регулируемого резистора 17, механической части 20 и коммутационного блока 12, Последний состоит из однополюсных; 15 и 16 двухполюсные 13 и 14 переключатеSk t зшр с (С ЗЗбсТА СГ ГО да 00
Изобретение касается определения технического состояния механизма подъема многодвигательного одноковшо- вого экскаватора.
Целью изобретения является оперативное и достоверное определение технического состояния механизма подъема экскаватора непосредственно в усло виях производства за счет возможности изменения режимов работы электродвигателей привода подъема.
На фиг.1 представлена схема стенда подключенного к электроприводу подъе- ма; на фиг.2 - схема экскаватора, поясняющая методику аналитического определения нагрузки.
Схема стенда электропривода механизма подъема экскаватора (фиг.1) со- стоит из генератора 1, двигателей 2 и 3 регулятора 4, управляющего обмоткой 5 возбуждения генератора и включением первого измерительного блока 6, источника 7 постоянного то- ка, второго измерительного блока 8, нагрузки 9, третьего измерительного блока 10, тахогенератора 11, коммутационного блока 12, состоящего из двухполюсных 13 и 14 и однополюсных 15 и 16 переключателей, токоограни- чивающего регулируемого резистора 17, обмотки 18 и 19 возбуждения первого и второго двигателей и механической части 20.
I. Определение потерь в электрических звеньях механизма подъема ДР5 и мехнических потерь в элементах редуктора и подшипников &РрПри первом замере двигатель 3 - машина постоянного тока (МПТ) - работает в режиме двигателя, а МПТ 2 - в режиме генератора. При втором замере режимы работы МПТ 3 и 2 меняются
Для производства первого замера с помощью двухпозиционных 13 и 14 и од- нопозиционных 15 и 16 переключателей устанавливается такой режим, при котором обмотка 18 возбуждения подклю
15
д
25 39„
0
5
0
чена непосредственно к источнику 7 постоянного тока, а обмотка 19 возбуждения - к источнику 7 постоянного тока через токоограничивающий регулируемый резистор 17, причем магнитные потоки обмоток возбуждения направлены так, что моменты на валу МПТ 2 и 3 направлены встречно
При плавном изменения напряжения генератора 1 возможны два состояния кинематической схемы механизма подъема экскаватора.
а)при отсутствии каната или при ослабленном канате, до момента его натяжения (при работе механизма на подъем ковша) момент сопротивления складывается из моментов сопротивления вращению подшипников и элементов редуктора Мр, т.е. Мс Мр ;
б)при полностью выбранном канате к моменту сопротивления добавляется момент противодействия подъему рабочего оборудования Мп, т.е. Мс Мр + + М„.
Для целей диагностики отдельных звеньев механизма подъема а представляет больший интерес. Наличие регистрирующей измерительной аппаратуры позволяет произвести земеры как по п.а, так и по п. б.
Для рассматриваемого состояния уравнение равновесия имеет вид
см,1(1
6Н
)6М
6
где См - постоянная по моменту, которая для первой и второй величина одинакоD1629854
ток якоря первой 2 и второй 3 последовательно соединенных МПТ;
номинальный ток возбуждения МПТ, работающий в режиме двигателя;
ток возбуждения МПТ, работающий в режиме генератора.
Баланс мощностей в этом случае Q меет вид
РД Рг + 2АРЭ + ДР ,
I. 6М
чде PI. - мощность, потребляемая МПТ, работающей в режиме двигателя ;
мощность, потребляемая МПТ, переведенной в генераторный режим;
потери в обмотке якоря одной МПТ;
потери мощности в элементах редуктора и подшипниках. По результатам замеров измерительыми блоками 6, 8 и 10 определяются:
РА
ГЛ
Рг - АР,
ДРР
Р гг
U2.b
АР, I. R,
1Й ЛЙ
де R - сопротивление цепи якоря
МПТ (имеется в паспорте МПТ) Для рассматриваемого случая (при слабленном канате) определяется
15
20
25
30
г
в
р р
в ч
U2I,
- 21 fR,
ДРр - И,1д - У2ХЙ - I.LI JXfl,
Баланс мощности подъемной лебедки в этом случае
Рд Рг + Р„ + 2йР9 + ДРМ, где ДРП - мощность, затрачиваемая на
подъем ковша;
ДРМ - потери мощности в редукторе и тросах подъемной лебедки или потерь в механической части.
Мощность, затрачиваемая на подъем ковша, определяется расчетно-экспериментальным путем
Рп мп,
где СО- угловая частота вращения барабана, определяемая экспериментально с помощью тахогенерато ра 11 блока 8 измерения и передаточного числа редуктора. - полезный момент рабочего обрудования, затрачиваемый на подъем ковша (с грузом или пустого).
М
п
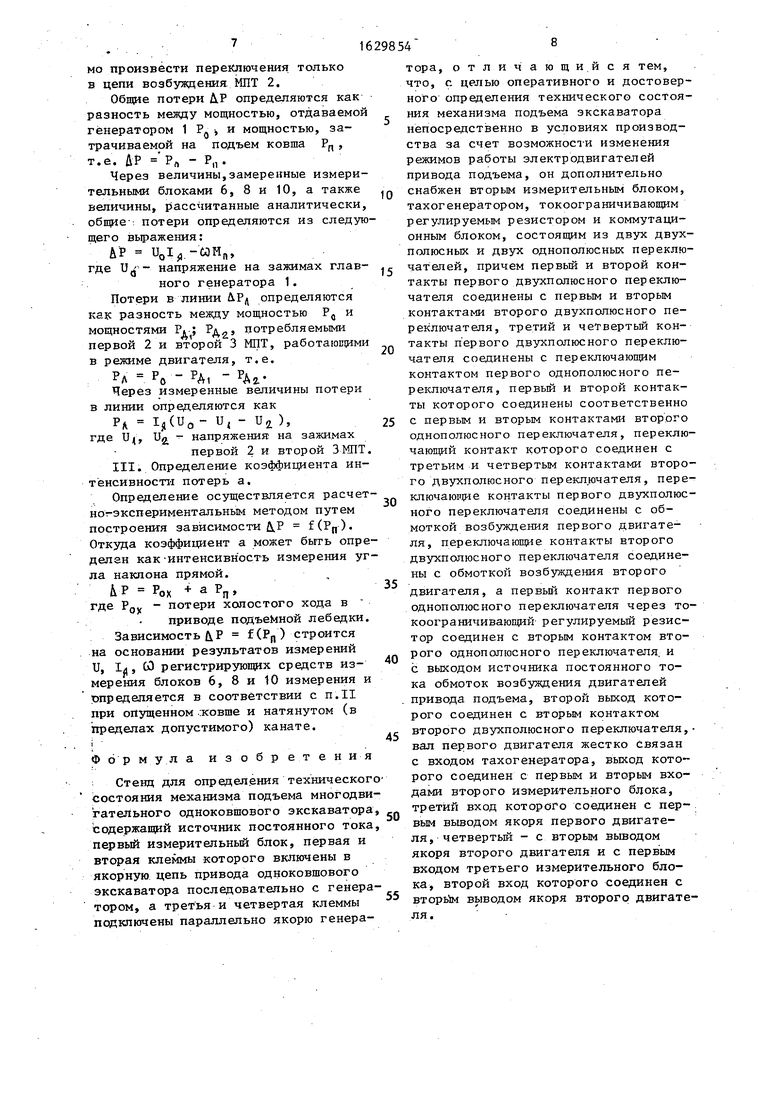
В соответствии с фиг.2
GKrK + Gpirp
RJ Г
мп
Ln
где
гп радиус действия силы относительно опорного подшипника;
R (-- радиус барабана подъемной лебедки;;
Зл - усилие подъема;
G - масса ковша (пустого или с грунтом);
гк - радиус поворота ковша относительно стрелы;
Gp- масса рукоятки;
rfрадиус поворота центра тяжести рукоятки. Из указанного следует, что потери в механической части механизма подъема А.РМ расчетно-экспериментальным путем могут быть определены из выражения„
5
0
5
0
4Рм
я
- V
- 21,
i-1-я iLfl я 1Чй гп- 3. Определение идентичности настройки и режима работы первой 2 и второй 3 МПТ.
Такое определение осуществляется путем перевода первой МПТ 2 в режим генератора, а второй МПТ 3- в режим двигателя. Для этого с помощью переключателей 13 - 16 установливает- ся такой режим, когда обмотка 18 возбуждения подключается к источнику постоянного тока через токоограничи- вающий управляемый резистор 17, а обмотка 19 возбуждения - к источнику постоянного тока непосредственно. Повторение замеров, изложенных в п.1 и 2, при одинаковых напряжении генератора 1 и тока якоря должно дать результаты, аналогичные полученным в предыдущем опыте. Если имеет место значительная разность результа тов измерений, то тщательной ревизии и настройке подвергают электрическую часть механизма подъема, так как для механической части нет разницы какая из МПТ работает в режиме двигателя,
0 а какая - генератором.
II. Определение общих потерь АР и потерь в линии ДРд .
При определении общих потерь ДР обе МПТ 2 и 3 работают в режиме двигателя. Для создания такого режима к их обмоткам ,8 и 19 возбуждения подводится номинальное напряжение. Если указанный эксперимент производится после описанного в п.З, то необходи5
мо произвести переключения только в цепи возбуждения МПТ 2.
Общие потери ДР определяются как разность между мощностью, отдаваемой генератором 1 Р. , и мощностью, затрачиваемой на подъем ковша Рп, т.е. ДР рп - Р„.
Через величины,замеренные измерительными блоками 6, 8 и 10, а также величины, рассчитанные аналитически, общие потери определяются из следующего выражения:
АР ,
где U - напряжение на зажимах глав- ного генератора 1.
Потери в линии йРд определяются как разность между мощностью Р4 и мощностями Рд ; Рд2, потребляемыми первой 2 и второй 3 МПТ, работающими в режиме двигателя, т.е.
рл РО РА, - РА2.Через измеренные величины потери
в линии определяются как
РЛ , - U2),
где Uj, U - напряжения на зажимах
первой 2 и второй ЗМПТ.
III. Определение коэффициента интенсивности потерь а.
Определение осуществляется расчет- но-экспериментальным методом путем построения зависимости Д.Р f (Рп ). Откуда коэффициент а может бьггь определен как-интенсивность измерения угла наклона прямой.
&Р Р,
ох
аРп,
где Рох - потери холостого хода в - приводе подъемной лебедки. Зависимость &Р f(Pn) строится на основании результатов измерений U, 1л, СО регистрирующих средств из- мерения блоков 6, 8 и 10 измерения и определяется в соответствии с п.II при опущенном ковше и натянутом (в пределах допустимого) канате. i
Формула изобретения
Стенд для определения технического состояния механизма подъема многодвигательного одноковшового экскаватора, содержащий источник постоянного тока, первый измерительный блок, первая и вторая клеммы которого включены в якорную цепь привода одноковшового экскаватора последовательно с генератором, а третья и четвертая клеммы подключены параллельно якорю генера
„
5
0
5
5
0
5
тора, отличающийся тем, что, с целью оперативного и достоверного определения технического состояния механизма подъема экскаватора непосредственно в условиях производства за счет возможности изменения режимов работы электродвигателей привода подъема, он дополнительно снабжен вторым измерительным блоком, тахогенератором, токоограннчиваюшим регулируемым резистором и коммутационным блоком, состоящим из двух двухполюсных и двух однополюсных переключателей, причем первый и второй контакты первого двухполюсного переключателя соединены с первым и вторым контактами второго двухполюсного переключателя, третий и четвертый контакты первого двухполюсного переключателя соединены с переключающим контактом первого однополюсного переключателя, первый и второй контакты которого соединены соответственно с первым и вторым контактами второго однополюсного переключателя, переключающий контакт которого соединен с третьим и четвертым контактами второго двухполюсного переключателя, переключающие контакты первого двухполюсного переключателя соединены с обмоткой возбуждения первого двигателя, переключающие контакты второго двухполюсного переключателя соединены с обмоткой возбуждения второго двигателя, а первый контакт первого однополюсного переключателя через то- коограничивающий регулируемый резистор соединен с вторым контактом второго однополюсного переключателя и с выходом источника постоянного тока обмоток возбуждения двигателей привода подъема, второй выход которого соединен с вторым контактом второго двухполюсного переключателя,- вал первого двигателя жестко связан с входом тахогенератора, выход которого соединен с первым и вторым входами второго измерительного блока, третий вход которого соединен с первым выводом якоря первого двигателя, четвертый - с вторым выводом якоря второго двигателя и с первым входом третьего измерительного блока, второй вход которого соединен с вторим выводом якоря второго двигателя.
Фиг. 2
б
| Стенд для испытания перфораторов | 1984 |
|
SU1273531A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для испытания электрических машин | 1980 |
|
SU868930A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Оценка эффективности эксплуатации и конструкции горных машин | |||
| Записки Ленинградского горного института, 1982, т.XXXVII с.20-23 | |||
| FrTni Sk t I гЈ,г | |||
