;
Изобретение относится к-ештомати..зированному электроприводу и может быть использовано в электроприводе механизма подъема экскаватора.
По основному авт. св. 586534 известен электропривод постоянного тока/ включающий контур регулирования скорости, контур регулирования тока возбуждения и контур регулирования тока якоря с логическим устройством для блокирования тока якоря. В цепи задания контура регули Ьвания тока якоря имеется звено вьщеления модуля. Контур регулирования тока возбуждения соединен через блок задания тока возбуждения, имеющий релейную характеристику, с вькодом дополнительного регулятора скорости. Этот регулятор подколочен своими входами к датчику скорости и через нелинейный элементк источнику сигнала задания сйорости.
Известный электропривод обеспечивает качественное регулирование скорости при работе с активным моментом нагрузки. Однако он не позволяет увеличить скорость двигателя сверх номинального значения путем ослабления потока возбуждения двигателя при возвращении разгружейного ковша в забой.
Цель изобретения - увеличение производительности электропривода.
Для этого в предлагаемый электро- . привод постоянного тока введены регулятор ЭДС, датчик ЭД: и два диода, причем выход блока задания тока возбуждения соединен через первый диод, включенный в обратном направлении, со входом регулятора тока возбуждения
to и первым входом регулятора ЭДС, второй вход которого соединен через второй диод, включенный в прямом направлении, с выходом датчика ЭДС, а выход - со входом регулятора тока воз15буждения.
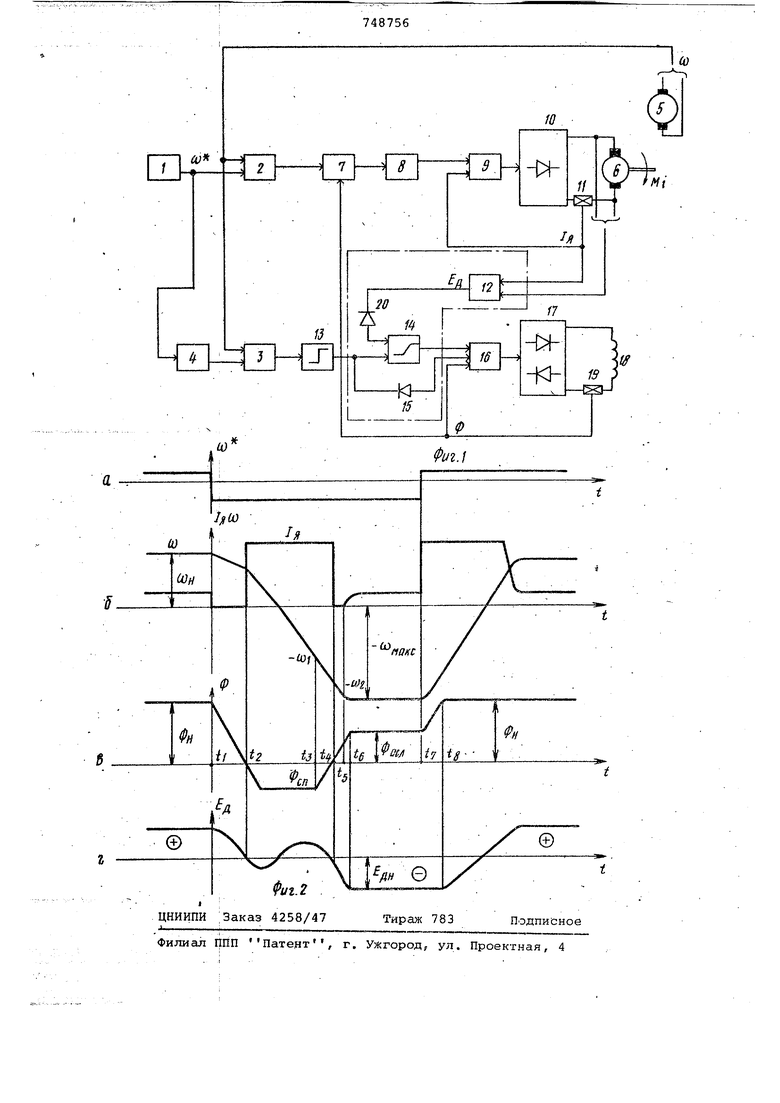
На фиг. 1 изображена функциональная схема электропривода; на фиг. 2 временные диаграммы изменения основных параметров.
20
Электропривод представляет собой многоконтурнун) систему регулирования, которая управляется от источника 1 задания скорости,подключенного на згща;Ющие входы двухрегуляторов скорости:
25 основного 2 - непосредственно и дополйительногр 3 - через последовательно включенный нелинейный элемент 4. На входы обратных связей обоих регуляторов 2 и 3 подаются сигналы, пропорци30
ональные скорости привода, с соответствуиадего датчика 5, что и обеспечй- waetрегулирование э%ого -параметра электропривода. Датчик 5 скорости механически сочленен с валом двигателя 6. постоянного тока. Вьлход основного f. регулятора 2 скорости через последовательно соединенные логическое устройство 7 для блокирования тсУка и звено 8 выделения модули подключен ко вхо- . ду задания регулятора 9 тока якоря. В свою очередь выход этого регулятора подключен к цепи управления нереверсивного преобразователя 10, к выходным
зйжйМаМКЬтОрого присоедйнены якорь двигателя б и последовательно с ним датчик тока 11.15
Выходной сигнал датчика тока 11 используется двояко. Он подается, воnSpSlJX, на вход обратной связи регулятора 9 тока якоря, тем самым замы 1Сая контур регулирования тока якор- 20 ной цепи и, во-вторых, подключенный к одному из двух входов датчика ЭДС 12 спдсобстйуёт реалиэ ции этого да.тчика.по известной схеМе выделения ЭДС из сигналов тока и Напряжения якор- 25
НОЙ цепи, подаваемот о на второй из
.упомянутых входов.
Выход дополнительного регулятора 3 .скорости соединен:ср входом блока 13 задания тока возбуждения, имеюще- го релейную характеристику.Выходной сигнал блока 13 с одной стрроны, явйяётся сигналом задания ЭДС двигателя подаваемого на первый вход регулятора 14 эд: ,а с другой стороны, через диод 15, обращенный катодом к 13, обеспечивает сигналтока возбуждения по одному из двух задающих входов ре гулятора 16 тока возбуждения.
Выходным сигналом регуля:тора 16 , тока возбуждения уп авляется ревер- 40 сивный преобразователь 17, подключенный выходными зажимами к обмотке 18 независимого возбуждения двигателя, и последовательно включенный с ней, , датчик 19 тока (потока) возбуждения. Сигнал с датчика 19поступает на вход обратной, связи регулятора 16 тока возбуждения, обраэуя контур регулирования тока возб ждения, и параллельно на управляющий вход логического Q уст{)Ойства 7 для блЬкирования тока . якоря. Второй из заедающих входов регулятора 16 тока воэб Ькдения подк:гпоче:н к выходу регулятора 14 ЭДС. Этот регулятор йторым своим входом через последовательно включенный в прямом 55
направлени диод 20 соединен с выходок датчика 12 ЭДС, ЧёМ создается последнйй из рёгулируёмы контуров, а именно, контур ЭДС дви1|ателя.
Логическое устройство 7 для блоки- д ревания. тока якоря предназначено для , чтобы сНймат1э сигнал задания с контура регулирОвайия тока якоря на время, когда при д4нном направлении потокч не может бьп;ь создан момент
требуемого направления. Это направление задает полярность выходного напряжения основного регулятора 2 скорости.
Блок 13 задания тока возбуждения Предназначен для формирования сигнала задания регулятору 14 ЭДЗ и регулятору 1 6 тока возбуждения. Напряжение насыщения блока задания тока возбуждения отрицательной полярности поступает непосредственно на регулятор 16 через диод 15.
Оно задает поток двиг.ателя Фсчт,соответствующий направлению момента двигателя на спуск; с целью ограничения ускорения при разгоне на спуск вели чину Э.ТОГО потока следует выбирать не больше, чем 50% от номинального значения Фц. Напряжение насьлщения блока задания тока возбуждения положительной полярнос и задает номинальное значение ЭДС двигателя для его работы в генераторном режиме.
Регулятор 14 предназначен для формирования сигнала задания контуру регулирования тока возбуждения в гене раторном режиме работы двигателя. Величина напряжения насыщения регулятора ЭДС соответствует заданию номинального потока двигателя.
Работает электропривод следующим образом,
До момента времени t, двигатель работает на подъем, т. е. его ско.рость направлена в противоположную сторону с5т активного момента статической нагрузки MC . При этом напряжение насыщения положительной полярности блока 13 задания тока возбуждения поступает на регулятор 14 .и вызывает ег насыщение, поэтому заданное значение потока двигателя и сам поток имеют но.минальное значение. Напряжение Ед на выходе датчика 12 в это время имеет . положительную полярность, для которой диод 20 включен в непроводящем направлении. Вследствие этого напряжение Ед на вход регулятора 14 не поступает .
В момент времени t изменяется полярность сигнала U) заданного значения скоро-стй на .выходе источника 1 задания скорости, как это показано на фиг. 2 а. Это вызывает изменение полярности выходных напряжений основного регулятора 2 скорости, дополнительного регулятора 3 скорости и блока 13 задания тока возбуждения. Напряжение насъзщенйя отрицательной полярности с вькода указанного блока поступает через диод 15 на вход регулятора 16 ток возбуждения и задает поток двигателя такого направления, который соответствует направлению его момента на спуск. В Момент выходное напряжение регулятора 14 равно .нулю, так как его характеристика однополярна.В промежуток времени t,t-, логическое устройство 7 для блокир.ования -тока
якоря уменьшает ток якоря 3q до нуля (см. фиг. 2 б), потому что-направцение потока двигателя не соотйетс лует требуемому направлению его момента:, В указанное время уменьшение скорости двигателя происходит только под действием момента статической нагрузки.
С момента времени k (см. фиг. 2 в) поток приобретает требуемое направление, упомянутое устройство прекращает блокирование тока якоря, поэтому с этого времени уменьшение скорости и ее реверс происходит уже под действием суммарного м мента двигателя и момента стйтйческой нагрузки MC .Из-за наличия нелинейного элемента 4 в цепи задания дополнительного регулятора 3 скорости этот регулятор имеет меньшее заданное значение скорости в направлении на спуск, чем основной регулятор 2 скорости. По этой причине полярность напряжения на выходе дополнительного регулятора 3 скорости поменяется при скорости UJ меньшей по абсолютному значению, чем скорость OJj, , при которой поменяется полярность напряжения на выходе основного/регулятора 2 скорости. Вследствие этого BN момент времени ij напряжение на выходе блока 13 задания тока возбуждения при обретает положительное значение, регулятор 14 попадает в насыщение, задавая, тем самым, номинальное значение потока в положительном направлении, поэтому начинается обратньзй ревере потока. ЭДС двигателяЕ в промежуток времени дважды изменяет свою полярность (см. фиг.2,г) однако выходной сигнал регулятора 14 остается равным нулю, потому что ЭДС положительной полярности не пропускает диод 20, а ЭДС отрицательной полярности действует в сторону нерабоче ветви статической характеристики регулятора 14. Как известно, ЭДС двигателя Ед пропорциональна произведению скорости двигателя на его поток. Своего наибольшего значения в рас-, сматриваемый отрезок времени ЭДС-Ед достигает в момент времени tj , когда поток имеет значение Ф, . , а скорость U) . Учитывая сказанное ранее о.величине потока Ф ,а также то, что скорость в приводах подъема экскаваторов превышает номинальную скорост не более, чем в два раза, и что скорость U), меньше по абсолютной величине, чем скорость Ы, , можно сделать вывод о том, что в рассматриваемый момент времени ЭДС Ед меньше номинальной, и что ее ограничения поэтому не требуется.
В промежуток времени логическое устройство 7 для блокирования
тока якоря снова уменьшает ток якоря до нуля, так как направление потока двигателя уже не соответствует требуемому направлению его момента. В указанный промежуток времени увеличение скорости двигателя происходит за счет действия активного момента статической нагрузки М,. С момента времени i ЭДС двигателя Ед приобретает отрицательное значение, для которого диод 20 уже включен в проводящем направлении. По мере увеличения потока Ф в положительном направлении результирующий сигнал на входе регулятора 14 уменьшается в момент времени t,, , когда ЭДС двигателя приобретает номинальное значение Едц этот результирующий сигнал уменьшает настолько, что регулятор 14 выходит из насыщения. При этом заданное значение потока уменьшается, поэтому и сам поток приобретает значение
ФОСА- Фн
Вмомент времени t происходит изменение сигнала заданного значения скорости LO. При этом увеличивается ток якоря и скорость двигателя начинает уменьшаться. Уменьшение скорости сопровождается уменьшением ЭДС двигателя Ед , что, в свою очередь, приводит к постепенному росту выходного напряжения регулятора 14, росту величины Зсщанного значения потока и самого потока. В момент времени tg регулятор ЭДС попадает в насыщение, поэтому устанавливается номинальное значение потока двигателя Ф .
Электропривод механизма подъема экскаватора имеет большую производительность, чем известный.- Повышение производительности достигается за счет перемещения порожнего ковша в забой с повышенной скоростью двигателей подъемной лебедки при ослаблении их потока возбуждения.
Формула изобретения
Электропривод постоянного тока по авт.св. № 586534, о т л и ч а ю щ и и с я тем, что, с целью увеличения производительности, он снабжен регулятором ЭДС, датчиком ЭДС и двумя диодами, причем выход блока задания тока возбуждения соединен через первый диод, включенный в обратном направлении, со входом регулятора тока возбуждения и первым входом регулятора ЭДС, второй вход которого соединен через второй диод, включенный в прямом направлении, с выходом датчика ЭДС, а выход - со входом регулятора тока возбуждения.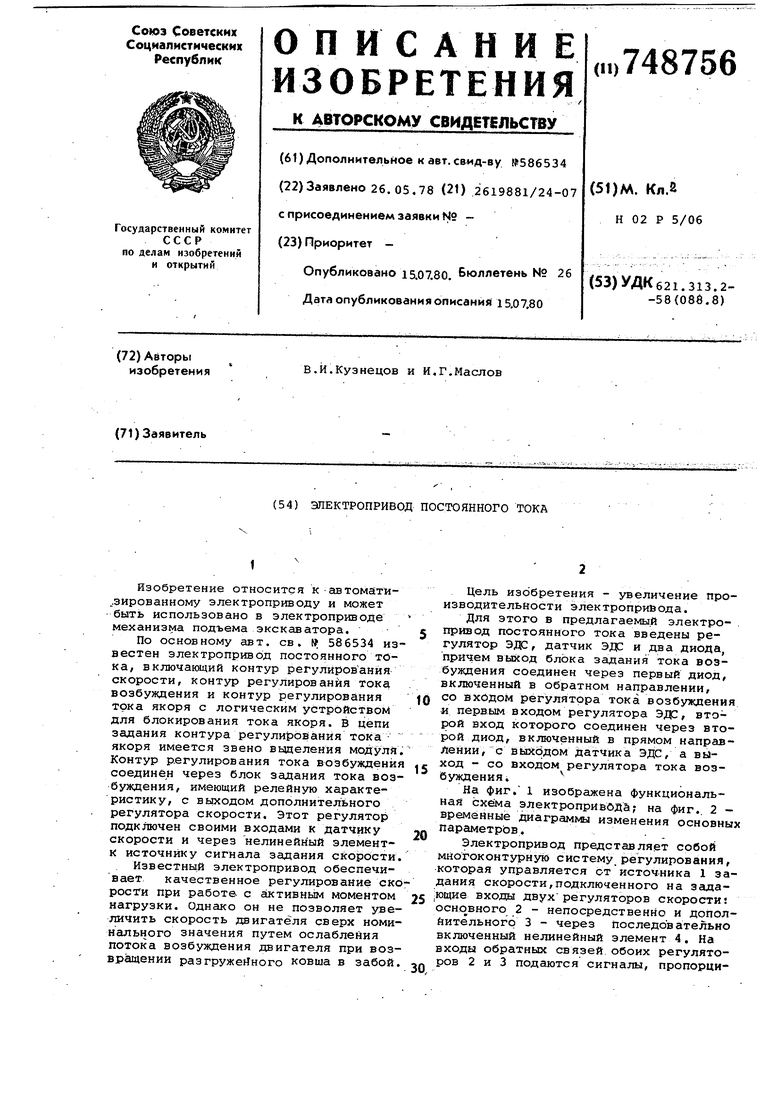
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления механизмом экскаватора | 1978 |
|
SU773212A1 |
| Электропривод для подъемной машины с переменными радиусами навивки канатов | 1980 |
|
SU904165A1 |
| Электропривод подъемной машины с переменными радиусами навивки канатов | 1982 |
|
SU1064408A1 |
| Электропривод для подъемной машины | 1983 |
|
SU1159138A1 |
| Электропривод постоянного тока | 1976 |
|
SU586534A1 |
| Устройство для управления возбуждением электродвигателя постоянного тока | 1978 |
|
SU782113A1 |
| Устройство для управления электроприводом постоянного тока | 1974 |
|
SU556546A1 |
| Электропривод подъемной машины | 1980 |
|
SU893780A1 |
| Устройство для управления электроприводом постоянного тока, выполненное по принципу двухзонного регулирования | 1979 |
|
SU938354A1 |
| Электропривод шахтной подъемной машины | 1973 |
|
SU650192A1 |