Изобретение относится к ядерной технике и может быть использовано в устройствах управления и защиты ядерного реактора для выполнения функции регулирования мощности, компенсации избыточной реактивности и аварийной защиты.
Целью изобретения является повышение быстродействия за счет уменьшения момента инерции вращающихся масс, связанных с ротором приводного двигателя.
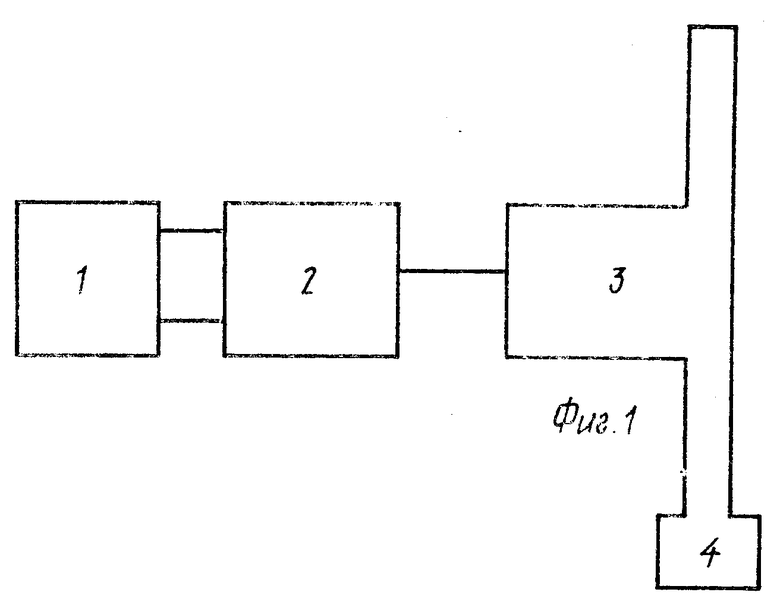
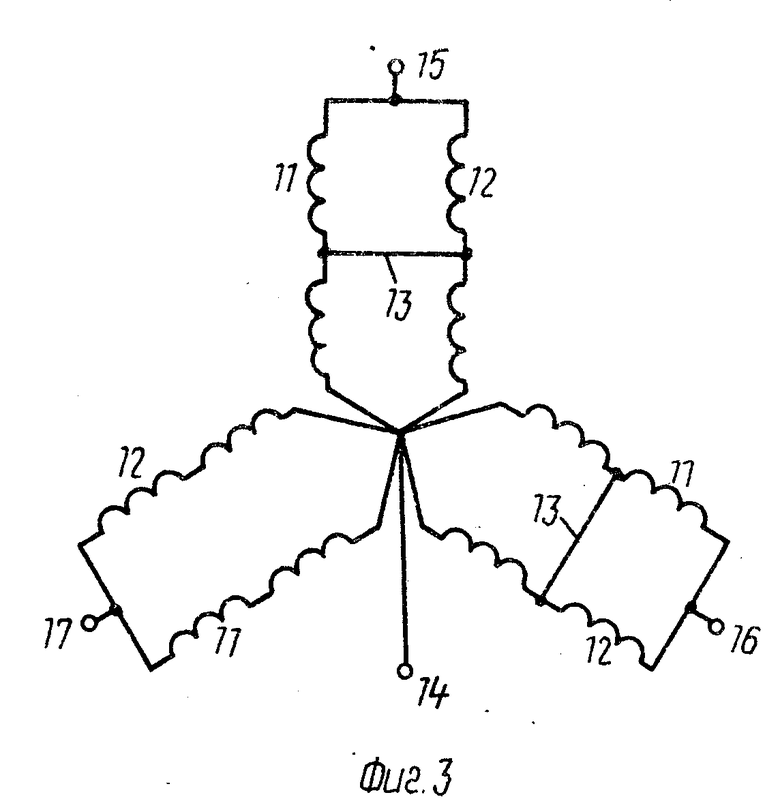
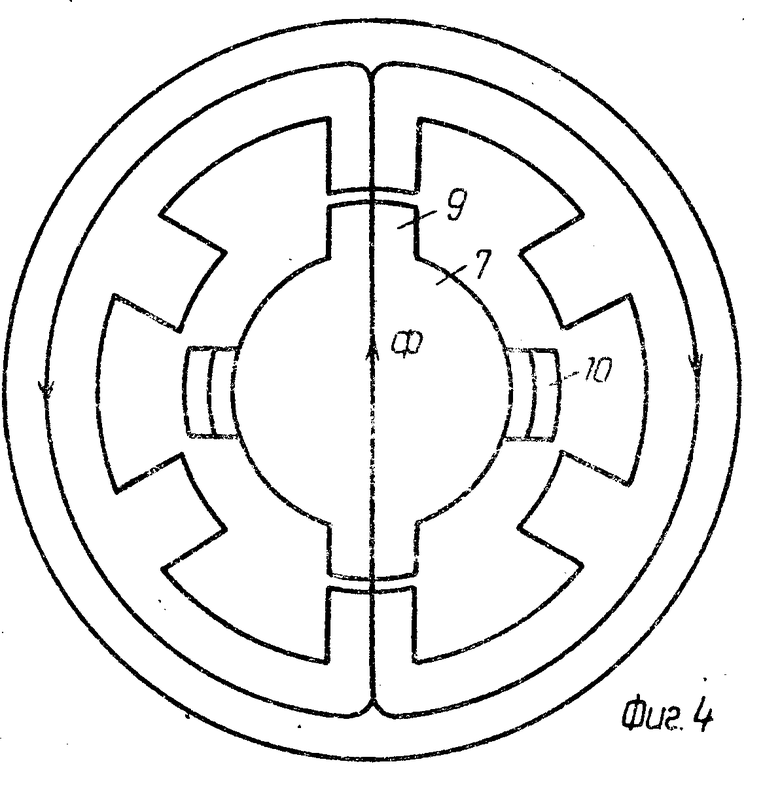
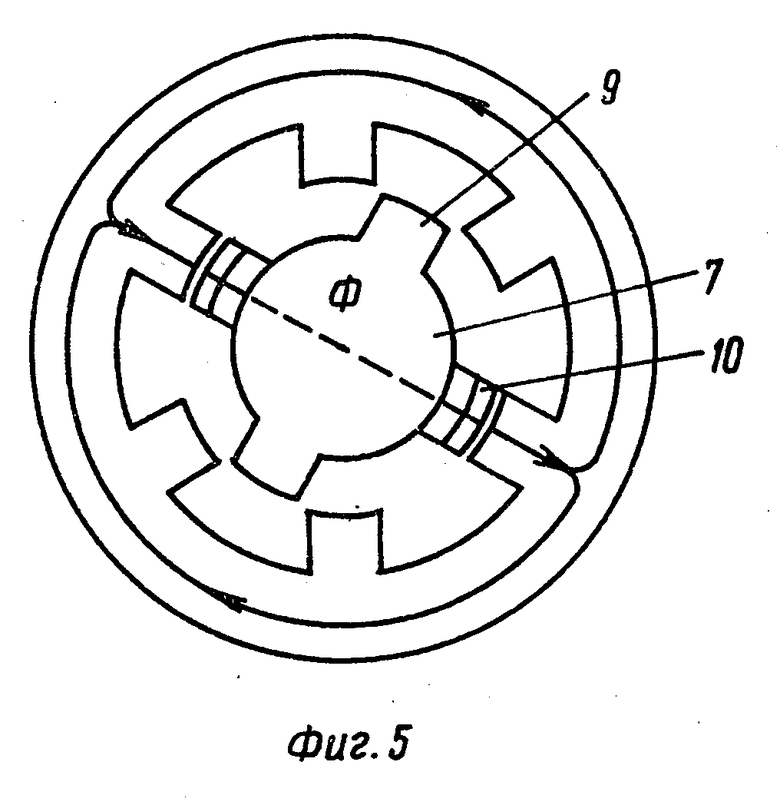
На фиг 1. показана блок-схема устройства; на фиг. 2-конструкция ротора приводного электродвигателя, совмещенного с постоянными магнитами регулятора скорости; на фиг. 3-вариант электрической схемы соединения катушек многофазной якорной обмотки приводного электродвигателя; на фиг. 4-6 положение ротора и схема замыкания магнитного потока при последовательном переключении фаз многофазной якорной обмотки приводного электродвигателя.
Устройство содержит блок 1 управления, в выходом которого электрически соединен приводной электродвигатель 2, совмещенный в одной электрической машине см регулятором скорости. С валом приводного электродвигателя 2 механически связан вал несамотормозящегося редуктора 3.
Редуктор 3 связан через реечную передачу с регулирующим органом 4. На роторе 5 приводного электродвигателя 2 установлены кольцевые постоянные магниты 6 (фиг. 2), намагниченные в аксиальном направлении. Каждый из них снабжен арматурой, состоящей из двух магнитопроводов 7 и 8, имеющих форму фланцев с когтеобразными полюсными выступами 9, охватывающими постоянный магнит 6. Минимальное число когтеобразных полюсных выступов 9 и 10, равномерно распределенных по окружности каждого из магнитопроводов 7 и 8, соответственно составляет два. При этом постоянные магниты 6 образуют N=2 полюса одинаковой полярности.
Когтеобразные полюсные выступы 9 и 10 обоих магнитопроводов 7 и 8 арматуры магнитов 63 образуют в совокупности зубцы реактивного ротора 52 приводного элеткродвигателя 2. Ротор 5 является реактивным, потому что при работе в режиме двигателя магнитный поток, создаваемый его якорной обмоткой (фиг. 3) при питании от блока 1 управления, замыкается исключительно через магнитопроводы 7 и 8 арматуры постоянных магнитов, минуя сами эти магниты. При таком замыкании потока вращающий электромагнитный момент, создаваемый приводным электродвигателем 2, является реактивным, т.е. он создается за счет реакции зубцов полюсных выступов 9 и 10 арматуры на изменение положения вращающегося магнитного поля, создаваемого в приводном электродвигателе 2 многофазной якорной обмоткой.
Эта обмотка состоит в каждой фазе из двух параллельных ветвей 11 и 12, средние точки которых замкнуты в одной или нескольких фазах между собой с помощью проводов 13. Вместо проводов к средним точкам этих фаз могут быть подключены конденсаторы. Общее число фаз многофазной якорной обмотки приводного электродвигателя 2 составляет не менее трех. Обмотка имеет (2N±1) полюсов и в случае простейшего трехфазного варианта может иметь 2(2+1)=6 полюсов или 2(2-1)=2 полюса. Зажимы 14 17 многофазной якорной обмотки служат для соединения с блоком 1 управления.
Устройство работает следующим образом. Блок 1 управления обеспечивает подачу питания на зажим 14 (непрерывно), и на зажимы 15, 1617 многофазной обмотки приводного электродвигателя 2 в последовательности 15, 16, 17, 15 и т. д. При этом в электродвигателе 2 создается вращающееся поле, которое в каждый момент времени совпадает с осью той фазы, которая находится под током. Это поле, замыкаясь в роторе 5 через полюсные выступы 9 и фланцы магнитопроводов 7, стремится повернуть ротор 5 до положения, при котором полюсные выступы 9 ориентированы вдоль поля обмотки.
Направление замыкания потока ⊘ в приводном электродвигателе 2 и конечное положение его ротора 5, в котором он оказывается после подключения питания к зажиму 15, показано на фиг. 4. После снятия питания с зажима 15 и подачи его на зажим 16 магнитное поле электродвигателя 2 смещается за некоторый угол, соответствующий взаимному пространственному смещению ваз многофазной якорной обмотки между собой. Это поле замыкается в роторе 5 через полюсные выступы 10 и фланцы магниторпороводов 8(фиг.5). В результате действия этого поля 5 смещается на угол π/ΝM, где М-число фаз многофазной якорной обмотки, что при М= 3 и N=2 составляет π/6 радиан, и останавливается в положении, при котором полюсные выступы расположены вдоль нового положения оси поля обмотки (фиг. 5).
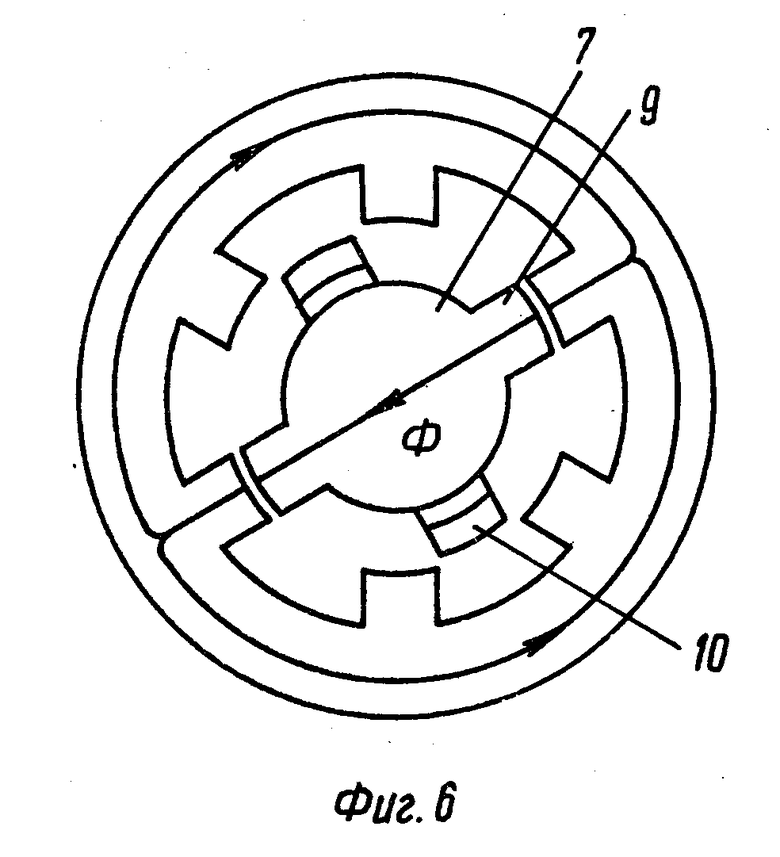
Снятие питания с зажима 16 и перенос его на зажим 17 обеспечивает дальнейшее смещение поля и поворот ротора еще на угол π/6 радиан (фиг.6). При этом рабочий поток замыкается в роторе 5 через полюсные выступы 9 и фланца магнитопроводов 7. Дальнейшее переключение питания в последовательности подачи его на зажимы 15, 16, 17 обеспечивает вращение ротора 5 аналогично. При этом рабочий поток в роторе 5 будет поочередно замыкаться через полюсные выступы 9 и фланцы магнитопроводов 7 или через полюсные выступы 10 и фланцы магнитопроводов 8. В этом режиме поток постоянных магнитов 6 регулятора скорости на вращающий момент приводного электродвигателя 2 влияния практически не оказывает, поскольку имеет место взаимная компенсация активного электромагнитного момента, обусловленного отталкивающим (при постоянных магнитов) и притягивающим (при разной полярности взаимодействующих полюсов) моментами от взаимодействия постоянных магнитов с полем однофазной обмотки управления.
Вращение ротора 5 приводного электродвигателя 2 преобразуется посредством редуктора 3 в вертикальное перемещение регулирующего органа 4 в направлении "Вверх". 0перемещение регулирующего органа 4 в направлении "Вниз" обеспечивается изменением очередности подачи напряжения с блока 1 управления на многофазную якорную обмотку приводного электродвигателя 2. Напряжение на зажимы обмотки подается в последовательности по номерам зажимов 15, 17, 16, 15 и т.д. Напряжение противоположного знака подается на зажим 14 непрерывно.
В результате обработки команд, вырабатываемых блоком 1 управления, обеспечивается перемещение регулирующего органа 4 в заданном направлении, т.е. работа устройство в режиме компенсации реактивности и регулирования мощности. Ротор 5 в этих режимах вращается с небольшой скоростью, поэтому взаимодействие короткозамкнутых или резонансных контуров, образованных в фазах многофазной якорной обмотки приводного электродвигателя 2 замыканием средних точек ее параллельных ветвей 11 и 12 проводниками 13 или конденсаторами, с постоянными магнитами 6, установлены на роторе 5 приводного электродвигатея 2, незначительно. Вследствие этого тормозной момент регулятора скорости, встроенного в приводной электродвигатель 2, невелик. Он легко преодолевается вращающим электромагнитным (реактивным) моментом приводного электродвигателя 2.
При поступлении сигнала аварийной защиты блок 1 управления обесточивается и питание зажимов 14, 15, 16, 17 приводного электродвигателя 2 снимается. Его ротор 5 начинает раскручиваться под действием веса регулирующего органа 4, связанного с ротором 5 через несамотормозящийся редуктор 3. Магнитный поток постоянных магнитов 6 регулятора скорости, замыкаясь через магнитопроводы 7 и 8 арматуры и когтеобразные полюсные выступы 9 и 10, образует в рабочем зазоре магнитное поле, вращающееся вместе с ротором 5. Полярность этого поля такова, что, если когтеобразные полюсные выступы 9 образуют полюса полярности N, то когтеобразные полюсные выступы 10 образуют полюса в полярности S.
Так как магнитопроводы 7 и 8 арматуры ротора 5 повернуты друг относительно друга на угол π/N=π/2/2/ (при N=2) радиан, то полюса вращающегося магнитного поля, образованного магнитами 6 ротора 5, распределяются вдоль окружности ротора 5 равномерно и имеют чередующуюся полярность. Такое поле, вращаясь вместе с ротором 5, наводит переменный ток в параллельных ветвях 11 и 12 фаз обмотки управления, замкнутых в средних точках приводами 13 или включенными вместо них конденсаторами. После этого тока, взаимодействуя с вращающимися магнитным проем, созданным постоянными магнитами 6, создает тормозной момент, пропорциональный скорости вращения подвижной части регулятора скорости, т.е. скорости вращения ротора 5 приводного электродвигателя 2. По достижении заданной скорости ротор 5 приводного электродвигателя 2, работающего в режиме регулятора скорости, создает необходимый тормозной момент, уравновешивающий действие веса подвижных частей устройства. Регулирующий орган 4 опускается в нижнее положение с равномерной скоростью.
Создание необходимого тормозного момента электродвигателя 2, работающего в режиме регулятора скорости, необходимого для получения заданной скорости опускания регулирующего органа 4, обеспечивается изменением числа фаз, в которых выводы средних точек параллельных ветвей 11 и 12 замкнуты между собой проводами 13 или конденсаторами, включенными вместо проводов. В случае применения конденсаторов, скорость опускания можно регулировать изменением емкости этих конденсаторов.
Предлагаемое устройство обладает высокой надежностью работы во всех режимах благодаря повышенному быстродействию, простой конструкций за счет меньшего числа узлов, входящих в устройство, относительно небольшой стоимостью, меньшими габаритами и массой.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 1991 |
|
RU2030798C1 |
| РЕАКТИВНАЯ МАШИНА | 2010 |
|
RU2412519C1 |
| Вентильный электродвигатель и способ его настройки | 1989 |
|
SU1772875A1 |
| УСТРОЙСТВО ДЛЯ ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ РЕГУЛИРУЮЩЕГО ОРГАНА | 1989 |
|
SU1692270A1 |
| СИНХРОННЫЙ ГЕНЕРАТОР С ВОЗБУЖДЕНИЕМ ОТ ПОСТОЯННЫХ МАГНИТОВ | 2004 |
|
RU2273942C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2013 |
|
RU2534225C2 |
| СИНХРОННАЯ ГЕНЕРАТОРНАЯ УСТАНОВКА С ВОЗБУЖДЕНИЕМ ОТ ПОСТОЯННЫХ МАГНИТОВ | 2004 |
|
RU2267856C1 |
| СИНХРОННЫЙ ГЕНЕРАТОР С ВОЗБУЖДЕНИЕМ ОТ ПОСТОЯННЫХ МАГНИТОВ | 2014 |
|
RU2548662C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ЭЛЕКТРОПРИВОДА ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ РЕГУЛИРУЮЩЕГО ОРГАНА | 2018 |
|
RU2693935C1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С МАГНИТНОЙ РЕДУКЦИЕЙ | 2013 |
|
RU2544835C1 |
Изобретение относится к области ядерной техники и может быть использовано в устройствах управления и защиты ядерного реактора для выполнения функций регулирования мощности, компенсации реактивности и аварийной защиты. Целью изобретения является повышение надежности работы путем повышения быстродействия. Устройство содержит постоянные магниты 6 регулятора скорости, установленные на роторе 5 приводного электродвигателя, снабженные арматурой, выполненной в виде магнитопроводов 7 и 8 из ферромагнитного материала и образующей 2N зубцов реактивного ротора. Многофазная якорная обмотка приводного электродвигателя, выполнена 2(N±1)-полюсной и снабжена выводами средний точек параллельных ветвей одной из нескольких фаз. В одной или нескольких фазах выводы средних точек параллельных ветвей замкнуты между собой накоротко или конденсаторами. Постоянные магниты 6 регулятора скорости выполнены в виде колец, намагниченных в осевом направлении, а арматура каждого постоянного магнита состоит из двух магнитопроводов, имеющих форму фланцев с N/2 равномерно распределенными когтеобразными полюсными выступами 9 и 10, охватывающими постоянный магнит, развернутых друг относительно друга на угол π/Ν радиан, фланцы которых примыкают к торцовым сторонам кольцевого постоянного магнита. 6 ил.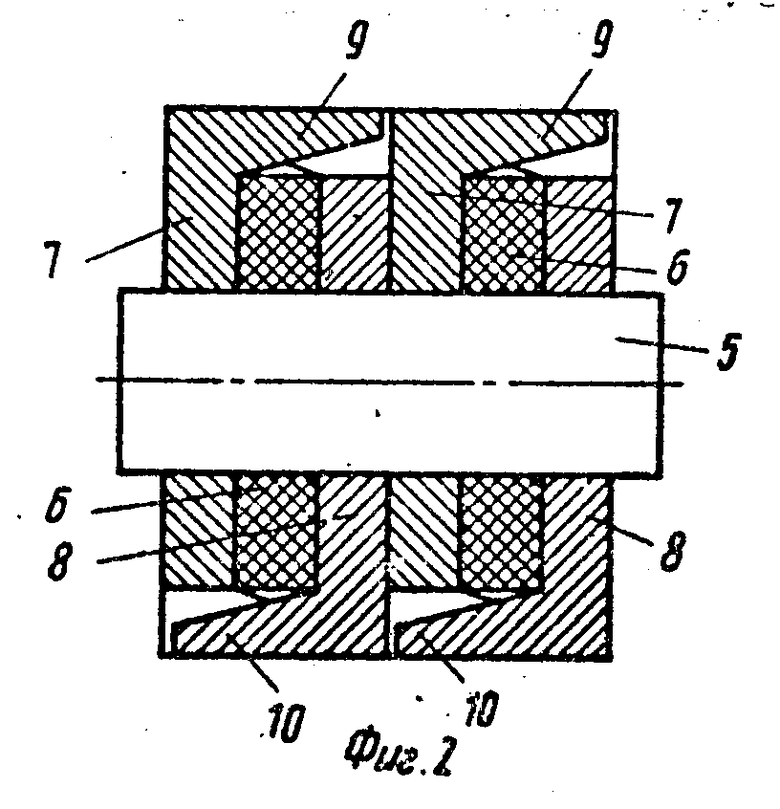
Устройство для вертикального перемещения регулирующего органа ядерного реактора, содержащее регулятор скорости, включающий вращающуюся часть с установленными на ней постоянными магнитами, образующими по окружности 2N полюсов чередующейся полярности, приводной электродвигатель, включающий статор с многофазной якорной обмоткой с двумя параллельными ветвями в каждой фазе и зубчатый реактивный ротор и несамотормозящийся редуктор, соединенный с регулирующим органом, отличающееся тем, что, с целью повышения быстродействия за счет уменьшения момента инерции вращающихся масс, связанных с ротором приводного двигателя, постоянные магниты регулятора скорости установлены на роторе приводного электродвигателя и снабжены арматурой, выполненной в виде магнитопроводов из ферромагнитного материала, образующей 2 N зубцов реактивного ротора, а многофазная якорная обмотка приводного электродвигателя выполнена 2(N±1)-полюсной и снабжена выводами средних точек параллельных ветвей одной или нескольких фаз, в одной или нескольких из которых выводы средних точек параллельных ветвей замкнуты между собой короткозамыкающими проводниками или конденсаторами, а постоянные магниты регулятора скорости выполнены в виде колец, намагниченных в осевом направлении, арматура каждого из которых состоит из двух магнитопроводов, имеющих форму фланцев с N/2 равномерно распределительными когтеобразными полюсными выступами, охватывающими постоянный магнит, развернутых друг относительно друга на угол π/N радиан, фланцы которых примыкают к торцовым сторонам кольцевого постоянного магнита.
| Устройство для управления вертикальным перемещением регулирующего органа | 1974 |
|
SU510701A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Авторское свидетельство СССР N 1540567, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
