Изобретение относится к ядерной технике и может быть использовано в электроприводах, преимущественно для управления вертикальным перемещением регулирующего органа ядерного реактора в режимах регулирования мощности, компенсации избыточной реактивности и быстрой остановки ядерного реактора при возникновении аварийной ситуации.
Цель изобретения повышение функциональной надежности работы устройства в тормозных режимах, влияние фаз обмотки управления электродвигателя, не замкнутых конденсаторами, на электромагнитный момент электродвигателя, при отключении его от блока управления и тем самым исключить образование паразитных моментов в этом режиме.
Исходя из изложенной сущности изобретения, его отличительными признаками являются:
а) последовательное включение в параллельных ветвях одной фазы согласно включенных катушек, расположенных на одном полюсе статора, и диода, катод которого соединен с фазным зажимом;
б) подключение каждого конденсатора к катушкам только одной фазы, в одной или нескольких фазах электродвигателя;
в) включение в параллельные ветви остальных фаз катушек, расположенных на разных полюсах.
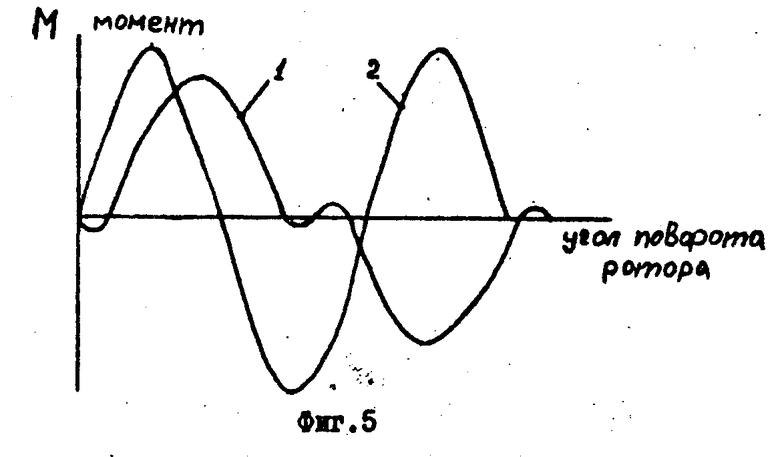
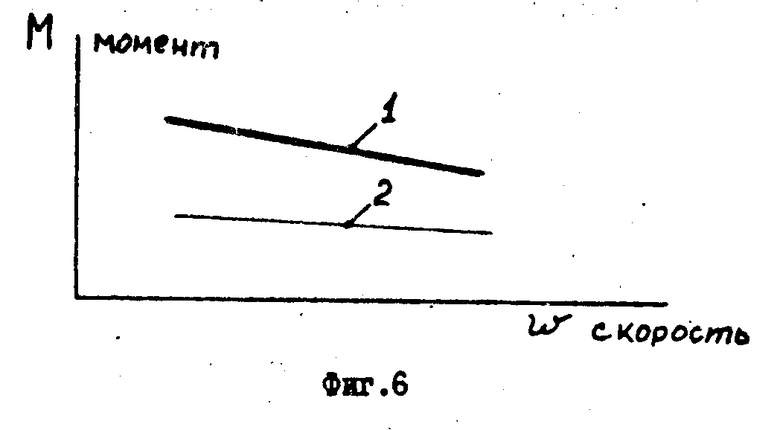
На фиг. 1 показана структурная схема; на фиг. 2 размещение катушек на статоре; на фиг. 3 разрез ротора шагового двигателя; на фиг. 4 тормозная характеристика; на фиг. 5 статическая характеристика; на фиг. 6 - динамическая характеристика.
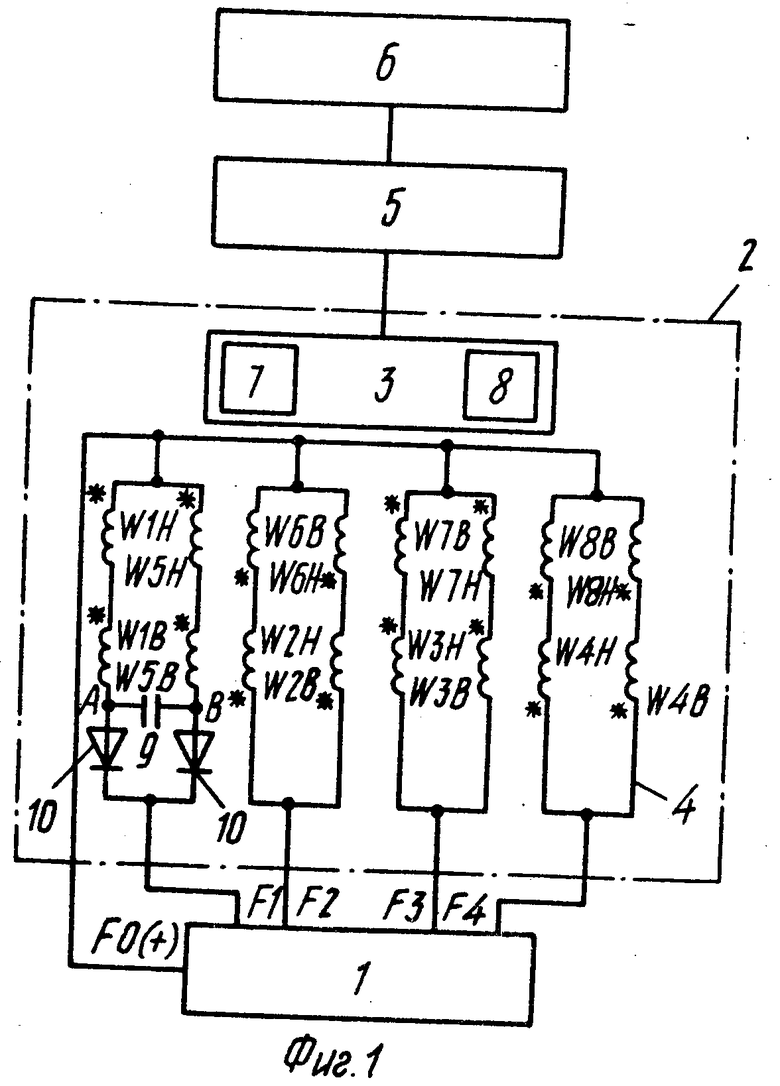
Устройство для вертикального перемещения регулирующего органа содержит блок управления 1 (фиг. 1), формирующий однополярные импульсы тока для питания шагового электродвигателя 2 с активно-реактивным ротором 3 и многофазной обмоткой управления 4. С ротором 3 шагового электродвигателя 2 через силовой редуктор 5 соединен регулирующий орган 6. Обмотка управления 4 выполнена в виде четырех фаз с выводом общей точки FO. Каждая фаза содержит четыре обмотки.
F1-W1B, W1H, W5B, W5H;
F2-W2B, W2H, W6B, W6H;
F3-W3B, W3H, W7B, W7H;
F4-W4B, W4H, W8B, W8H.
Здесь цифровой индекс при буквенном обозначении обмотки (W) обозначает номер полюса статора, на котором расположена это обмотка. Буквенный индекс означает нахождение обмотки относительно ротора; с индексом В верхняя, с индексом Н нижняя обмотки, например W1B обмотка первого полюса верхняя, W2H второго полюса нижняя.
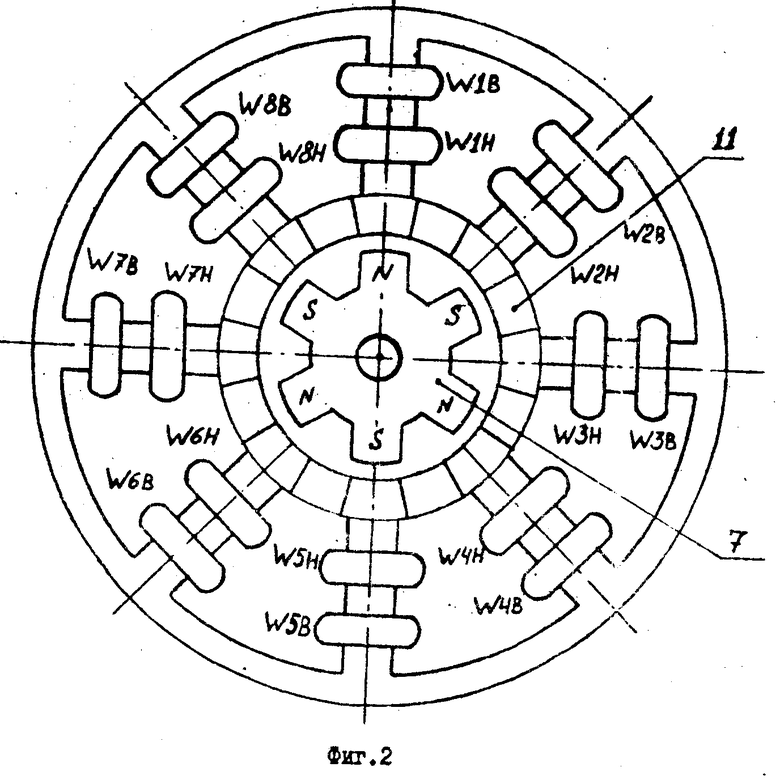
На каждом полюсе статора расположено две обмотки статор имеет 8 полюсов и 16 обмоток. На первом полюсе (расположение полюсов взято условно) W1B, W1H, на втором полюсе W2B, W2H, на третьем полюсе W3B, W3H и т.д. до восьмого полюса W8B, W8H.
В одной из фаз обмотки управления, в фазе F1, в одну параллельную ветвь последовательно и согласно включены обмотки первого полюса W1B, W1H. В другую параллельную ветвь этой фазы (F1) последовательно и согласно включены обмотки W5B, W5H пятого полюса статора, расположенного диаметрально противоположно по отношению к первому полюсу. Первая ветвь этой фазы подключена через диод к фазному выводу, катод которого соединен с фазным зажимом, а анод с концом обмотки W1B. Вторая ветвь этой фазы подключена к фазному выводу через другой диод, катод которого также соединен с фазным зажимом, а анод с концом обмотки W5B. Haчала обмоток W5H, W5B подключены к общему выводу FO.
В остальных фазах в одну параллельную ветвь включены обмотки, расположенные на разных полюсах. В первую ветвь фазы F2 включена обмотка верхняя W2B второго полюса статора и обмотка нижняя W6H шестого полюса, расположенного диаметрально противоположно ко второму полюсу.
Во вторую параллельную ветвь фазы F2 включены нижняя обмотка второго полюса W2H и верхняя обмотка шестого полюса W6B. Начала обмоток W2H, W2B подключены к фазному зажиму B2, а концы обмоток W6H, W6B к общему выводу FO. В фазе F3 и фазе F4 параллельные ветви образованы аналогично фазе F2 и включены в фазе F3 аналогично фазе F1, в фазе B4- аналогично фазе F2. Соединение обмоток аналогичным образом показано на фиг. 1.
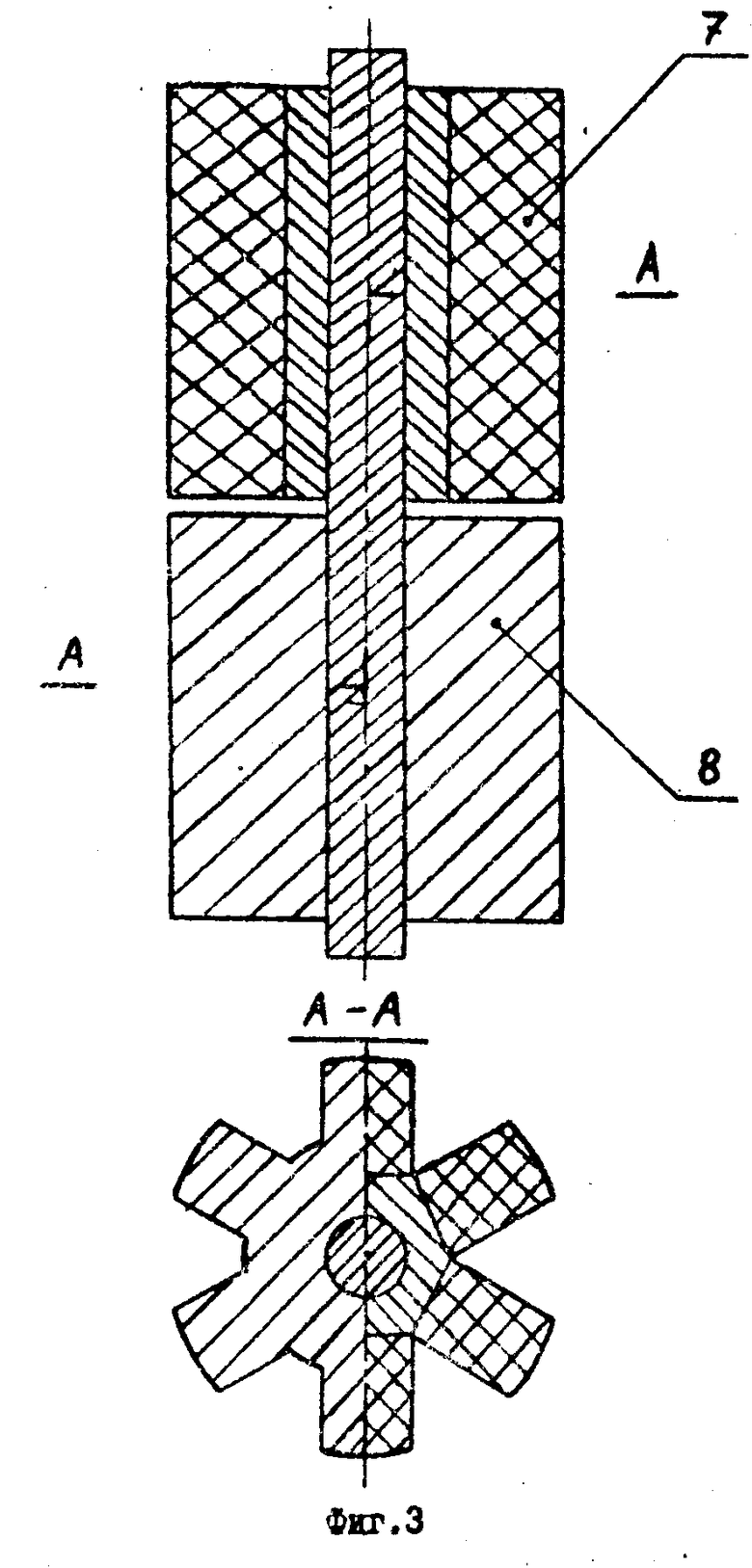
Ротор 3 шагового электродвигателя 2 состоит из двух частей: активной части 7 и реактивной части 8, имеющих по 6 полюсов каждая. Пространственные оси полюсов активной части 7 и реактивной части 8 совпадают. Пространственные оси полюсов активной части 7 имеют постоянные магниты разной полярности с последовательностью N, S, N, S, N, S. Реактивная часть 8 ротора 3 выполнена из электротехнической стали в виде звездочки и имеет 6 полюсов и 6 пазов. Ротор 3 показан на фиг. 3, а на фиг. 2 показана активная часть 7 ротора 3.
Устройство работает следующим образом.
Блок управления 1 обеспечивает подачу питания на обмотки шагового электродвигателя 2, которые при нормальной работе находятся под током, в результате чего электродвигатель удерживает регулирующий орган 6 в том или ином положении. В режиме удержания регулирующего органа 6, т.е. в статическом режиме, от блока управления 1 по обмоткам двух соседних фаз (например, F1, F2) шагового электродвигателя 2 протекает постоянный электрический ток в одном направлении от общего вывода "+" FO к фазным выводам "-" F1, F2. Под действием тока обмотки W1B, W1H, W5B, W5H фазы F1 и обмотки W2B, W2H, W6B, W6H фазы F2 создают неподвижное магнитное поле, которое в одном случае взаимодействует с полем постоянных магнитов активной части 7 ротора 3 и одновременно, в другом случае, создает поток, который проходит через полюса реактивной части 8 ротора 3 и развивает статический момент, равный сумме моментов активной и реактивной частей 7, 8 ротора 3, и ротор 3 удерживает регулирующий орган 6 через силовой редуктор 5 на заданном уровне.
Момент первой гармоники активной части равен нулю, так как диаметрально расположенные полюса активной части 7 ротора 3 намагничены разнополярно.
Момент второй гармоники активной части 7 ротора 3 совпадает по периоду с первой гармоникой момента от реактивной части 8 и суммируется с ней. Для перемещения регулирующего органа 6 вверх или вниз в нормальном режиме работы, от блока управления 1 в обмотку управления 4 шагового электродвигателя 2 подаются импульсы тока с заданной частотой, соответствующей скорости перемещения регулирующего органа 6. В каждый момент времени через обмотку управления 4 по двум, рядами расположенным, фазам с последовательным чередованием питания фаз F1-F2, F2-F3, F3-F4, F4-F1 и т.д. протекает ток в направлении от общего вывода FO к фазам F1-F2 или F-F3 или F3-F4 или F4-F1 и т.д. Питание с потенциалом "+" всегда подается на общий вывод FO. Для изменения направления перемещения, чередование питания фаз с потенциалом "-" изменяется на обратное F1-F4, F4-F3, F3-F2, F2-F1 и т.д. При этом ток через конденсатор с фазы F1 не проходит, так как точки включения конденсатора (А и В фиг.1) являются точками равного потенциала, из-за идентичности обмоток в параллельных ветвях. Выход из строя конденсатора 9, а также пробой одного или обоих диодов 10 не влечет потерю работоспособности устройства в нормальном режиме, так как конденсатор включен в одну фазу обмотки управления 4 шагового электродвигателя 2, а пробой диодов (замыкание) 10 не нарушает целостность цепи между ветвями фазы и блоком управления 1 и сохраняет работоспособность устройства. В режиме нормального движения скорость вращения ротора составляет 5-15 об/мин. Практически в этом режиме ток от электродвижущей силы, наведенной в катушках от вращения активной части 7 ротора 3, ничтожно мал и не оказывает заметного влияния на работу устройства.
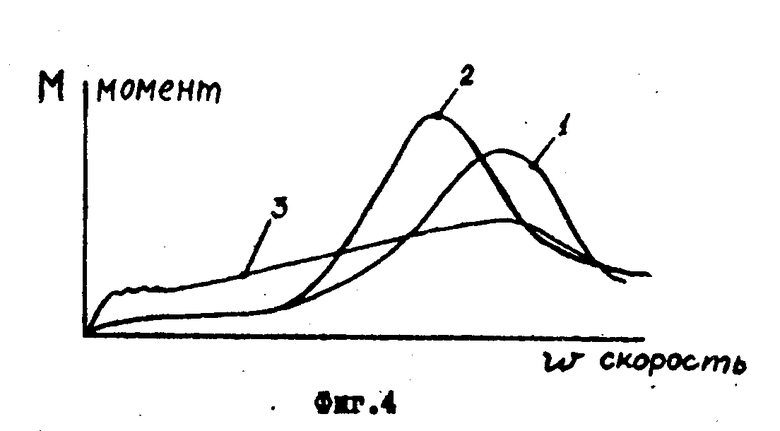
При аварийном обесточивании блока управления 1 ротор 3 шагового электродвигателя 2 начинает раскручиваться через редуктор 5 под действием массы подвижных частей регулирующего органа 6. При этом магнитное поле активной части 7 ротора 3 наводит в обмотке управления 4 шагового двигателя 2 переменную электроподвижную силу вращения, причем в обмотках диаметрально противоположных полюсов статора наводятся электродвижущие силы, противоположные по фазе. Результирующая электродвижущая сила в точках контура А, В (фиг. 1), образованного параллельными ветвями и конденсатором 9 фазы F1, имеет максимальную величину, потому что обмотки в обеих ветвях включены согласно и электродвижущая сила каждой ветви суммируется. В остальных фазах F2, F3,F4 результирующая электродвижущая сила, наведенная по контуру образованными параллельными ветвями равна "0", так как в обмотках каждой параллельной ветви фаз F2, F3, F4 наводятся электродвижущие силы с разными знаками и взаимокомпенсируются и, следовательно, эти ветви на работу шагового электродвигателя 2 при обесточенном блоке управления 1 влияния не оказывают. Результирующая электродвижущая сила контура фазы F1 вызывает ток по этому контуру и оказывает на ротор 3 тормозящее воздействие. При малых скоростях вращения ротора 3 шагового электродвигателя 2 сопротивление емкостной цепи фазы F1 велико и ток в контуре незначителен. В других фазах F2, F3, F4 ток в контуре отсутствует. Тормозной момент, развиваемый шаговым электродвигателем 2, на этих скоростях мал и ротор 3 продолжает разгоняться. По достижении ротором 3 заданной скорости, определяемой соотношением индуктивности катушек управления 4 и емкостью конденсатора 9 (равенство индуктивного и емкостного сопротивления фазы F1), происходит резонанс напряжения. Напряжение контура резко возрастает и ток в обмотках фазы F1 резко увеличивается, что вызывает возрастание тормозного момента шагового электродвигателя 2 и эффективное ограничение скорости перемещения регулирующего органа 6 до установившегося значения.
Характеристика тормозного момента устройства в зависимости от скорости перемещения (вращения ротора) и величины емкости конденсатора показана на фиг. 4 (кривые 1, 2, 3). С увеличением емкости увеличивается максимум тормозного момента и смещается в область малых скоростей (кривая 2), при уменьшении емкости конденсатора максимум тормозного момента уменьшается и смещается в области больших скоростей (кривая 1). Таким образом, изменением величины емкости конденсатора 9 возможно регулировать скорость перемещения регулирующего органа 6 и изменять максимальную величину тормозного момента (кривая 3 фиг. 4 взята с прототипа для сравнения).
При выходе из строя конденсатора 9 (фиг. 1, закорачивание вывода, пробой) тормозной момент на большой скорости уменьшается (но полностью не исчезает), за счет взаимодействия магнитного поля активной части 7 ротора 3 (фиг. 2) и вихревых токов, наведенных в толстостенной герметизирующей трубе 11 (фиг. 2), что повлечет увеличение скорости вращения ротора 3 и быстрое перемещение регулирующего органа 6. Такой режим аварийного перемещения допускается техническими условиями на приводах ядерных реакторов.
Чтобы исключить отказ диодов 10 (разрыв цепи внутри диодов; при этом работоспособность устройства в тормозном режиме сохраняется), нужно использовать диоды с запасом по величине тока и обратному напряжению по сравнению с реальными величинами, известными при работе устройства. Учитывая то, что диод является надежным элементом с очень высоким коэффициентом надежности, то введение диодов не снижает надежности устройства.
Диоды 10, включенные последовательно с коммутирующими элементами (транзисторами или тиристорами) оконечного каскада усилителя мощности дополнительно предохраняют эти элементы от воздействия коммутационных перенапряжений, возникающих при отключении фаз обмотки управления электродвигателя. Таким образом, они не только не снижают надежность работы электродвигателя, но, напротив, позволяют существенно повысить ее.
При необходимости увеличения тормозного момента на большой скорости конденсатор 9 и диоды 10 могут быть включены аналогично первой фазе еще в одну фазу обмотки или еще в две фазы или во все четыре фазы. Это позволит гибко изменять характеристику тормозного момента, добиваясь требуемого значения установившейся скорости опускания регулирующего органа.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 1991 |
|
RU2030798C1 |
| УСТРОЙСТВО ДЛЯ ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 1989 |
|
SU1632237A1 |
| БЕСКОНТАКТНЫЙ ДИСКРЕТНЫЙ ЭЛЕКТРОПРИВОД | 1988 |
|
SU1582945A1 |
| ДВУХФАЗНЫЙ НЕРЕВЕРСИВНЫЙ ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ДВИГАТЕЛЬ | 2004 |
|
RU2266604C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ЭЛЕКТРОПРИВОДА ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ РЕГУЛИРУЮЩЕГО ОРГАНА | 2018 |
|
RU2693935C1 |
| ЭЛЕКТРОРЕЗОНАНСНЫЙ ПРИВОД | 2005 |
|
RU2310264C2 |
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ И ПРОЦЕССОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2013 |
|
RU2543495C1 |
| ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ | 2009 |
|
RU2401503C1 |
| РЕАКТИВНАЯ МАШИНА | 2010 |
|
RU2412519C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2003 |
|
RU2268525C9 |
Изобретение относится к ядерной технике и может быть использовано в электроприводах, преимущественно для управления вертикальным перемещением регулирующего органа ядерного реактора в режимах регулирования мощности, компенсации избыточной реактивности и быстрой остановки ядерного реактора при возникновении аварийной ситуации. Цель изобретения - повышение функциональной надежности работы устройства в тормозных режимах. Для этого ротор выполнен шестиполюсным, а статор - с восемью полюсами, на каждом из которых размещены по две катушки, включенные определенным образом. 6 ил.
Устройство для вертикального перемещения регулирующего органа, содержащее шаговый электродвигатель с активным ротором и многофазной обмоткой на полюсах статора, к которой подключены конденсаторы, силовой редуктор, связанный с регулирующим органом, и блок управления, соединенный тремя выходами с соответствующими разными выводами шагового электродвигателя, отличающееся тем, что, с целью повышения функциональной надежности работы устройства в тормозных режимах, в нем четвертый и пятый выходы блока управления соединены с соответствующими фазными входами шагового электродвигателя, причем ротор шагового электродвигателя является шестиполюсным в виде двух соосных частей, одна из которых выполнена из магнитомягкого материала, а другая из магнитотвердого, статор выполнен с восемью полюсами, на каждом из которых размещены по две обмотки, причем в одной или нескольких фазах обмотки, расположенных на одном полюсе статора, включены последовательно согласно в одну ветвь, параллельную ветви, состоящей из соединенных последовательно согласно обмоток этой же фазы, расположенных на диаметрально противоположном полюсе, а каждая ветвь подключена к аноду соответствующего диода, подключенного катодом к соответствующему фазному выводу, каждый конденсатор включен между анодами диодов, в остальных фазах в параллельные ветви включены последовательно согласно по две обмотки, расположенные на диаметрально противоположных полюсах, параллельные ветви нечетных фаз подключены к своему фазному выводу концами обмоток, а параллельные ветви четных фаз началами обмоток.
| Устройство для управления вертикальным перемещением регулирующего органа | 1975 |
|
SU539299A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Авторское свидетельство СССР N 1067963, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Авторское свидетельство СССР N 776316, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
