Изобретение относится к ядерной технике и может быть использовано в устройствах управления и защиты ядерного реактора для выполнения функций регулирования мощности, компенсации избыточной реактивности.
Известно устройство для перемещения регулирующего органа, содержащее приводной двигатель, несамотормозящийся редуктор, к выходному валу которого присоединен регулирующий орган, и блок коммутации обмоток управления приводного двигателя.
В этом устройстве приводной двигатель выполнен в виде шагового двигателя с активным ротором. Его обмотки управления соединены с выходом блока коммутации, вход которого соединен со схемой управления. По сигналу аварийной защиты блок управления обесточивает обмотки управления шагового двигателя, а блок коммутации замыкает их между собой. Под действием веса подвижных частей регулирующий орган начинает опускаться и приводит во вращение ротор шагового двигателя. При этом магнитное поле постоянных магнитов, установленных на роторе шагового двигателя, взаимодействует с током, наведенным в замкнутых обмотках управления, в результате чего создается тормозной момент, ограничивающий скорость опускания регулирующего органа (авт.св. N 510701). Недостатками этого устройства являются сложность, обусловленная наличием блока коммутации обмоток приводного двигателя, и недостаточная надежность, обусловленная возможностью обрыва или повреждения длинных линий связи, соединяющих блок коммутации и обмотки приводного двигателя. В случае повреждения этих линий торможение регулирующего органа не будет обеспечено, в результате чего его скорость недопустимо возрастет, что может привести к поломке механической части устройства.
Известно также устройство для управления вертикальным перемещением регулирующего органа, в котором для выполнения функций торможения и обеспечения заданной скоpости опускания регулирующего органа в аварийных режимах применен регулятор скорости, вращающаяся часть которого выполнена с применением постоянных магнитов. Постоянные магниты взаимодействуют с неподвижной короткозамкнутой обмоткой, в результате чего развивается тормозной момент, необходимый для регулирования скорости [1]. Однако при таком решении резко возрастает инерционность вращающихся масс, жестко связанных с ротором приводного двигателя. В результате при работе устройства в режимах регулирования мощности и компенсации реактивности существенно снижается быстродействие, а также снижается точность позиционирования вследствие увеличения свободного выбега ротора двигателя после подачи команды на останов или реверс. В режиме аварийной защиты увеличивается продолжительность разгона ротора двигателя и жестко связанной с ним подвижной части регулятора скорости до установившегося значения скорости опускания регулирующего органа. Вследствие перечисленных факторов быстродействие указанного устройства во всех режимах его работы оказывается недостаточным.
Наиболее близким к предлагаемому по технической сущности и достигаемому результату является устройство для вертикального перемещения регулирующего органа по заявке содержащее электродвигатель, совмещенный с регулятором скорости, включающий ротор с постоянными магнитами, снабженными арматурой, образующей по окружности 2N плюсов чередующейся полярности и 2N зубцов зубчатого реактивного ротора приводного электродвигателя, и статор с многофазной якорной обмоткой, образующей 2(N±1) полюсов и снабженной выводами средних точек параллельных ветвей одной или нескольких фаз, замкнутых между собой в указанных фазах короткозамыкающими приводами или конденсаторами [2] . Недостатком известного устройства является невысокое быстродействие при работе в режиме аварийной защиты, поскольку в этом режиме регулятор скорости развивает слишком большой тормозной электромагнитный момент при низких скоростях вращения ротора. Повышенный тормозной электромагнитный момент регулятора скорости существенно увеличивает время аварийного сброса регулирующего органа и снижает тем самым его функциональную надежность.
Целью изобретения является повышение функциональной надежности устройства путем увеличения установившейся скорости опускания регулирующего органа в режиме аварийной защиты.
Поставленная цель в устройстве для вертикального перемещения регулирующего органа, содержащем регулятор скорости, состоящий из кольцевых постоянных магнитов с арматурой, образующих по окружности 2N полюсов чередующейся полярности, установленных на роторе приводного электродвигателя, включающего статор с многофазной якорной обмоткой с двумя параллельными ветвями в каждой фазе, снабженными выводами средних точек в одной или нескольких фазах, и несамотормозящийся редуктор, соединенный с регулирующим органом, достигается тем, что к выводам средних точек параллельных ветвей фаз якорной обмотки подключены резисторы, активное сопротивление каждого из которых превышает индуктивное сопротивление фазы якорной обмотки на этих же выводах при частоте вращения ротора, соответствующей требуемой скорости равномерного опускания регулирующего органа действием собственного веса.
Исходя из изложенной сущности изобретения, его отличительными признаками являются:
подключение резисторов к выводам средних точек параллельных ветвей в одной или нескольких фазах якорной обмотки приводного электродвигателя;
величина активного сопротивления каждого резистора, превышающая индуктивное сопротивление фазы якорной обмотки приводного электродвигателя на выводах средних точек ее параллельных ветвей при частотах вращения ротора, соответствующей требуемой скорости равномерного опускания регулирующего органа под действием собственного веса.
Первый признак позволяет сместить положение максимума тормозного электромагнитного момента, развиваемого регулятором скорости, в область более высоких скоростей вращения ротора приводного электродвигателя, без изменения величины этого максимума. Тем самым обеспечивается возможность применения предлагаемого технического решения в устройствах, где требуется более высокая установившаяся скорость опускания регулирующего органа под действием собственного веса, чем та, которая может быть обеспечена в прототипе. За счет этого расширяется область применения предлагаемого устройства.
Второй признак позволяет устанавливать величину активного сопротивления резисторов по требуемой величине скорости равномерного опускания установившейся скорости опускания регулирующего органа под действием собственного веса. В результате достигается такая повышенная скорость опускания регулирующего органа под действием собственного веса, которая не меньше некоторой заданной известной величины, необходимой для надежной работы устройства в режиме аварийной защиты.
По обоим признакам аналогичных решений не выявлено, что позволяет сделать вывод о соответствии заявляемого технического решения критерию "существенные отличия".
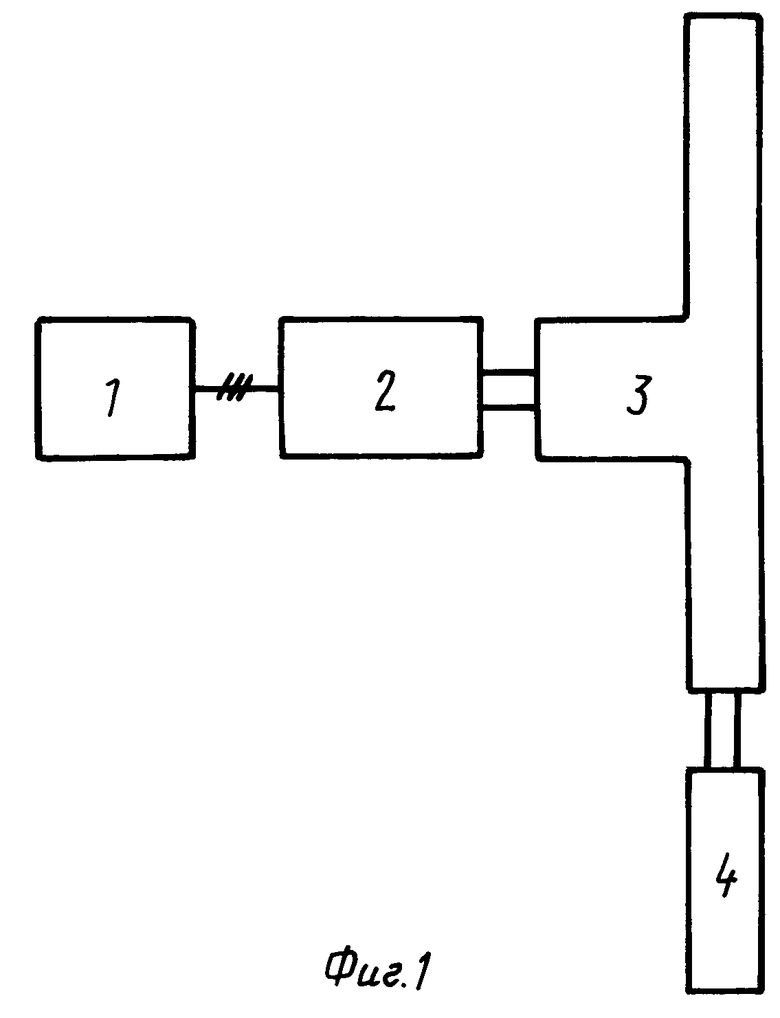
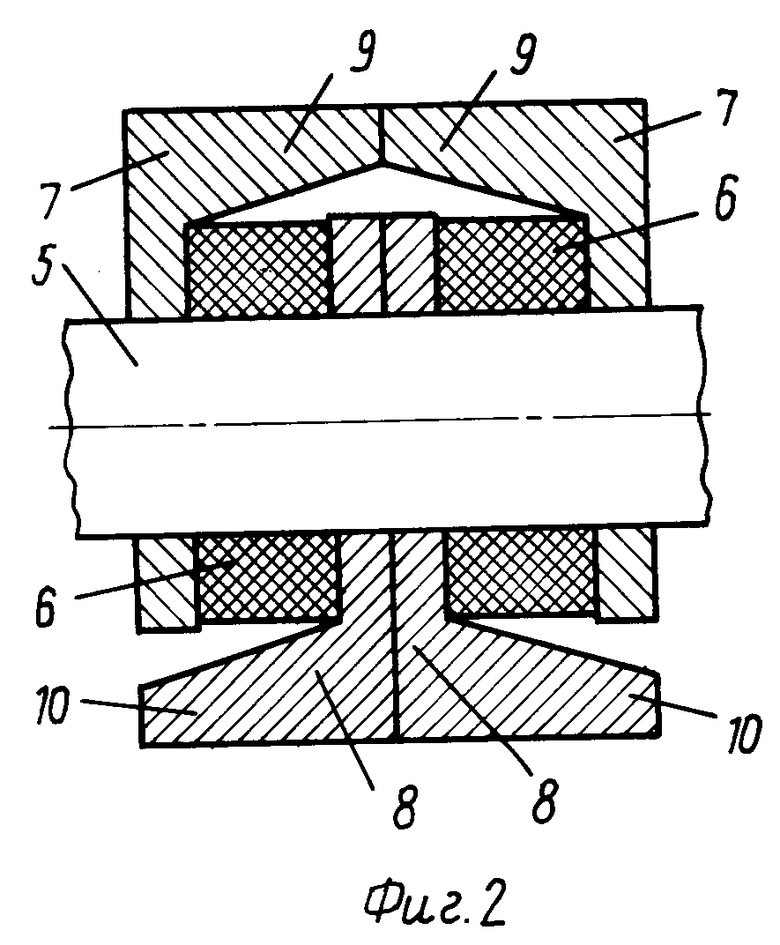
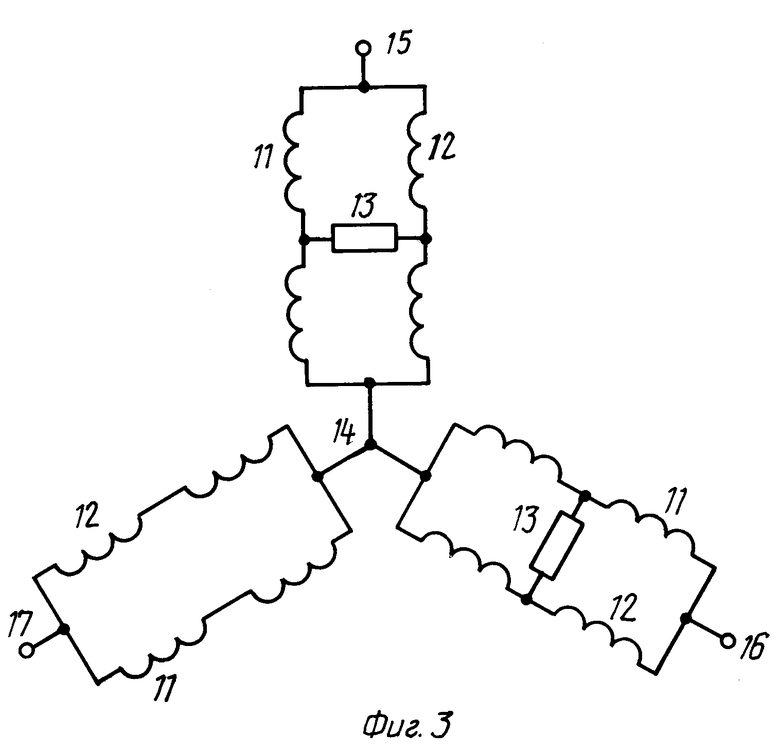
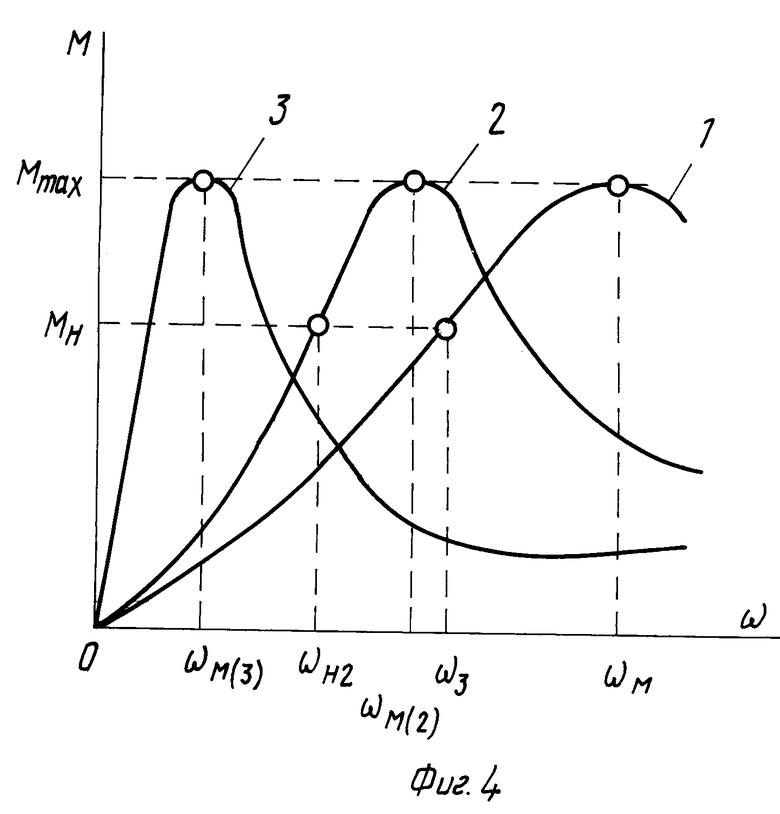
На фиг. 1 представлена структурная схема предлагаемого устройства; на фиг. 2 - конструкция ротора, приводного электродвигателя совмещенного с регулятором скорости; на фиг. 3 - вариант электрической схемы соединения катушек многофазной якорной обмотки приводного электродвигателя; на фиг. 4 - зависимости тормозного электромагнитного момента, развиваемого приводным электродвигателем, совмещенным с регулятором скорости, при разных значениях активного сопротивления резисторов, включаемых в качестве короткозамыкающих проводов (R1> R2> R3), от скорости вращения его ротора для режима опускания регулирующего органа под действием собственного веса.
Устройство содержит блок управления 1, с выходом которого электрически соединен приводной электродвигатель 2, который совмещен в одной электрической машине с регулятором скорости. С валом приводного электродвигателя 2 механически связан вал несамотормозящегося силового редуктора 3. Редуктор 3 связан через реечную передачу редуктора с регулирующим органом 4. На роторе 5 приводного электродвигателя 2 установлены кольцевые постоянные магниты 6 (фиг. 2). Магниты 6 намагничены в аксиальном направлении. Каждый из них снабжен арматурой, состоящей из двух магнитопроводов 7 и 8, имеющих форму фланцев с когтеобразными полюсными выступами 9 и 10, охватывающими постоянный магнит 6. Минимальное число когтеобразных полюсных выступов 9 и 10, равномерно распределенных по окружности каждого из магнитопроводов 7 и 8, соответственно составляет два. При этом постоянные магниты 6 образуют N=2 полюса одинаковой полярности. Когтеобразные полюсные выступы 9 и 10 обоих магнитопроводов 7 и 8 арматуры магнитов 6 образуют в совокупности зубцы реактивного ротора 5 приводного электродвигателя 2. Реактивным ротор приводного электродвигателя 2 является потому, что при работе в режиме двигателя магнитный поток, создаваемый его якорной обмоткой (фиг. 3) при питании от блока управления 1, замыкается исключительно через магнитопроводы 7 и 8 арматуры постоянных магнитов, минуя сами эти магниты. При таком замыкании потока вращающий электромагнитный момент, создаваемый приводным электродвигателем, является реактивным, т.е. он создается за счет реакции зубцов - полюсных выступов 9 и 10 арматуры на изменение положения вращающегося магнитного поля, создаваемого в приводном электродвигателе многофазной якорной обмоткой. Эта обмотка (фиг. 3) состоит в каждой фазе из двух параллельных ветвей 11 и 12, средние точки которых замкнуты в одной или нескольких фазах между собой с помощью резисторов 13 . Резисторы 13 могут быть выполнены с постоянным электрическим (активным) сопротивлением или же, допускать изменение - подстройку активного сопротивления до оптимальной величины.
Общее число фаз многофазной якорной обмотки приводного электродвигателя составляет не менее трех. Обмотка имеет 2(N±1) полюсов и в случае простейшего трехфазного варианта может иметь 2(2+1)=6 полюсов или 2(2-1)=2 полюса. Зажимы 14-17 многофазной якорной обмотки служат для электрического соединения с блоком управления 1.
Устройство работает следующим образом. Блок управления 1 обеспечивает подачу питания на зажим 14 (непрерывно) и на зажимы 15-17 многофазной якорной обмотки приводного электродвигателя 2, последовательности 15,16, 17, 15 и т.д. При этом в двигателе создается вращающееся магнитное поле, которое вращает ротор 5 и перемещает посредством редуктора 3 регулирующий орган 4 в условном направлении "Вверх". Вращение ротора 5 приводного электродвигателя 2 в противоположном направлении и перемещение регулирующего органа 4 в направлении "Вниз" обеспечивается подачей питания на зажимы многофазной якорной обмотки в обратной последовательности: 15, 17, 16, 15 и т.д. Таким образом обеспечивается работа устройства в режимах компенсации реактивности и регулирования мощности. Ротор 5 приводного электродвигателя 2 в этих режимах вращается с небольшой скоростью, поэтому взаимодействие электрических контуров, образованных в фазах многофазной якорной обмотки приводного электродвигателя 2 замыканием средних точек ее параллельных ветвей 11 и 12 резисторами 13 с постоянными магнитами 6, установленными на роторе 5 незначительно. Вследствие этого тормозной электромагнитный момент регулятора скорости, встроенного в приводной электродвигатель 2, невелик. Он легко преодолевается вращающим электромагнитным моментом двигателя 2.
При поступлении сигнала аварийной защиты блок управления 1 обесточивается и питание с зажимов 14-17 приводного электродвигателя 2 снимается. Его ротор 5 начинает раскручиваться под действием веса регулирующего органа 4, связанного с ротором через несамотормозящийся редуктор 3. Магнитное поле постоянных магнитов 6, вращаясь вместе с ротором 5, наводит переменный ток в параллельных ветвях 11 и 12 фаз обмотки управления, замкнутых в средних точках резисторами 13. Поле этого тока взаимодействия с вращающимся магнитным полем, созданным постоянными магнитами 6, создает тормозной электромагнитный момент М, пропорциональный скорости вращения ротора 5, ω ;
M =  (1) где Сm - постоянная момента приводного электродвигателя, зависящая от его конструктивных размеров и от числа фаз, выводы средних точек параллельных ветвей 11 и 12 которых замкнуты резисторами;
(1) где Сm - постоянная момента приводного электродвигателя, зависящая от его конструктивных размеров и от числа фаз, выводы средних точек параллельных ветвей 11 и 12 которых замкнуты резисторами;
R - активное сопротивление резистора (активное сопротивление фазы якорной обмотки приводного электродвигателя 2 не учитывается);
L - индуктивность одной фазы якорной обмотки приводного электродвигателя.
При достижении заданной скорости вращения ротора 5 тормозной момент М приводного электродвигателя 2 уравновесит действие веса регулирующего органа 4 и связанных с ним подвижных частей. После этого регулирующий орган 4 опускается с равномерной установившейся скоростью.
Из теории электрических машин Костенко М.П. и Пиотровского Л.М. Электрические машины. Л.: Энергия, 1973, ч. 2, 648 с., с; 487-490) известно, что величина максимума электромагнитного момента М, развиваемого при взаимодействии вращающегося магнитного поля с током электрических контуров от величины активного сопротивления, дополнительного включаемого в последние, не зависит. Величина этого сопротивления R определяет только значение скорости вращения ротора, при которой максимальное значение электромагнитного момента М будет достигнуто (фиг. 4). Вычисляя производную момента по скорости и приравнивая ее нулю, из уравнения (1) определяем значение скорости вращения ротора, соответствующее максимуму тормозного электромагнитного момента, развиваемого приводным электродвигателем 2 при вращении его ротора под действием веса регулирующего органа 4:
ω=R/L.
Установившейся линейной скорости опускания регулирующего органа под действием собственного веса, необходимой для надежной работы устройства в режиме аварийной защиты, соответствует заданная скорость ω3равномерного вращения ротора 5 приводного электродвигателя 2, работающего в качестве регулятора скорости. Очевидно, что заданная скорость равномерного вращения ω3, которую требуется получить для работы в режиме аварийной защиты может быть получена только в том случае, если она не превышает скорость, на которой развивается максимум электромагнитного момента ωм (фиг. 4 кривая 1). В противном случае, при меньшем значении сопротивления R2 < R , нагрузка от веса регулирующего органа Мн будет уравновешена тормозным электромагнитным моментом приводного электродвигателя на значительно более низкой скорости ωн2(фиг. 4, кривая 2), не обеспечивающей надежную работу устройства в режиме аварийной защиты из-за пониженного быстродействия. Следовательно, для надежной работы устройства в режиме аварийной защиты необ- ходимо иметь
ωм =  или R > ω3L, (2)
или R > ω3L, (2)
Таким образом, необходимо, чтобы активное сопротивление резисторов 13 превышало индуктивное сопротивление фазы якорной обмотки ω3L приводного электродвигателя, которым обладает фаза обмотки на выводах средних точек ее параллельных ветвей 11 и 12.
При использовании короткозамыкающих проводов с пренебрежимо малым активным сопротивлением (как в устройстве по основному изобретению (скорость ωМ(3) является весьма низкой (фиг. 4, кривая 3), так как активное сопротивление электрических контуров, взаимодействующих с полем ротора, в таком варианте определяется исключительно активным сопротивлением якорной обмотки, которое всегда имеет наибольшую величину. Поэтому в таком варианте выполнение условия (2) обеспечивается в крайне узком низкочастотном диапазоне скоростей вращения ротора от 0 до ωМ(3). В предлагаемом же варианте устройства не представляет технических сложностей изготовить резисторы 13 с любой величиной активного сопротивления и тем самым добиться выполнения условия (2) независимо от требуемой скорости равномерного вращения ротора ω3.
Индуктивность L фазы якорной обмотки может быть определена электромагнитным или расчетным путем, например, может быть использована расчетная методика, основанная на применении метода проводимостей зубцовых контуров. Индуктивность фазы L определяется для положения ротора 5, при каждом от его полюсов совпадают с осями полюсов этой же фазы якорной обмотки приводного электродвигателя.
Применение указанного устройства в приводе 45СП вместо базового образца, который имеет отдельный, не совмещенный с приводным электродвигателем, регулятор скорости позволяет на 48% снизить динамическую постоянную времени, повысив за счет этого быстродействие и надежность работы устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 1989 |
|
SU1632237A1 |
| ЭЛЕКТРОПРИВОД ДЛЯ ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ РЕГУЛИРУЮЩЕГО ОРГАНА | 2013 |
|
RU2533177C1 |
| РЕАКТИВНАЯ МАШИНА | 2010 |
|
RU2412519C1 |
| УСТРОЙСТВО ДЛЯ ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ РЕГУЛИРУЮЩЕГО ОРГАНА | 1989 |
|
SU1692270A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ЭЛЕКТРОПРИВОДА ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ РЕГУЛИРУЮЩЕГО ОРГАНА | 2018 |
|
RU2693935C1 |
| АВАРИЙНЫЙ ТОРМОЗ ДЛЯ ПОДЪЕМНЫХ МЕХАНИЗМОВ | 1991 |
|
RU2043295C1 |
| ИНДУКТОРНАЯ МАШИНА | 2010 |
|
RU2422971C1 |
| ГОРИЗОНТАЛЬНЫЙ ГЕРМЕТИЧНЫЙ НАСОС | 1994 |
|
RU2080488C1 |
| Вентильный электродвигатель и способ его настройки | 1989 |
|
SU1772875A1 |
| Устройство для управления вертикальным перемещением регулирующего органа | 1974 |
|
SU510701A1 |
Сущность изобретения: устройство содержит короткозамыкающие провода, выполненные в виде резисторов, причем активное сопротивление каждого резистора превышает индуктивное сопротивление фазы якорной обмотки приводного электродвигателя на выводах средних точек ее параллельных ветвей, при частоте вращения ротора, соответствующей требуемой скорости равномерного опускания регулирующего органа под действием собственного веса. 4 ил.
УСТРОЙСТВО ДЛЯ ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА, содержащее регулятор скорости, состоящий из кольцевых постоянных магнитов с арматурой, образующих по окружности 2N полюсов чередующейся полярности, установленных на роторе приводного электродвигателя, включающего статор с многофазной якорной обмоткой с двумя параллельными ветвями в каждой фазе, снабженными выводами средних точек в одной или нескольких фазах, и несамотормозящийся редуктор, соединенный с регулирующим органом, отличающееся тем, что, с целью повышения функциональной надежности путем увеличения значения установившейся скорости опускания регулирующего органа в режиме аварийной защиты, к выводам средних точек параллельных ветвей фаз якорной обмотки подключены резисторы, активное сопротивление каждого из которых превышает индуктивное сопротивление фазы якорной обмотки на этих же выводах при частоте вращения ротора, соответствующей требуемой скорости равномерного опускания регулирующего органа под действием собственного веса.
| УСТРОЙСТВО ДЛЯ ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 1989 |
|
SU1632237A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
