ч м
|СГ
f -ч Л Jv.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стеновой элемент | 1988 |
|
SU1534155A1 |
| Шарошечное долото | 1988 |
|
SU1627646A1 |
| Кузов-фургон транспортного средства | 1988 |
|
SU1627443A1 |
| Устройство для тренировки штангистов | 1988 |
|
SU1623670A1 |
| Устройство для испытания материалов на сжатие со сдвигом | 1989 |
|
SU1633328A2 |
| Устройство для регулирования температуры | 1989 |
|
SU1624418A2 |
| Транспортная система автоматизированной линии сборки | 1986 |
|
SU1495071A1 |
| Флотационная машина | 1987 |
|
SU1535638A1 |
| Прицеп-стогообразователь | 1987 |
|
SU1545998A1 |
| Трехфазный стабилизированный преобразователь напряжения | 1989 |
|
SU1624425A1 |
рц
,с
сГ
И lf)pl i rl llvI Ч )i 1 IК Ч i HIM IKH I p
и MB 11 M0/4u 61 I I , И 1Ю 11 ( МЫ НО 1фИ ( О i ,A
нии промыт lemibix роботов и манип IHTO ров про ina $наче ииы пя переноса деталей pa t гичных т и по pa (меров
1Ь ) изобретения яв яе-ия расширение ксп i а анионных возможностей строй с i на
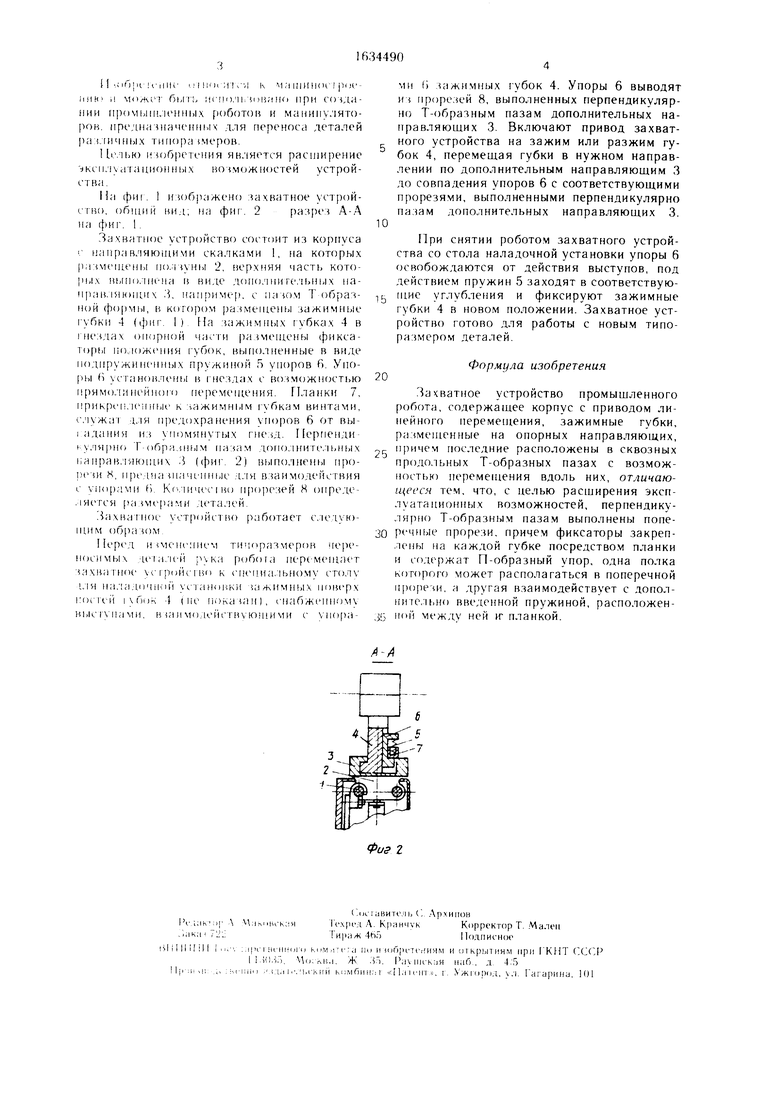
На фц 1 изображено захватное строи с во общий ни i на фиг 2 рафез А А на фи 1
Захватное устройство tot гонт из Kopnvta нанрав 1яющими (.катками 1 на которых р i зме mt ны потны 2 верхняя часть кото рих ныно пи на в ни 1.0 ишопнич 1ьных на нрав 1ЯКИЦИ например с л зом 1 образ ной фо|)мы к котором размещены ia/кимные 4 (фи( I) На зажимных бках 4 в i немых опорной размещены фикеа торы но ю/кения бок выношенные в виде по иф /кипе иных iip /кипой 5 норов 6 Уно ы h c i анов 1ены в 1незт,ах с возможностью прямо пик иною перемещения Птанки 7 прикрс i к тыс к ia/кимным бкам винтами i н/ка: т, in npe нения поров 6 от вы аданин Hi помян гых rueii Hepnenin i ч тярнь Г обр i jiHJM па ам i,ono inure п.ных i аправ )цих } (фи 2) выношены про i i ш х upt uia нач1 иные i я в «имотейч гвия с Ho) Ь Кг in 4i 1.1 во проремей 8 он ре ц 1яеге я ра пн цта it и
Захвамнн гроипво работает i- ie i ю щим обра uiv
Ilept i и (Mt in inc м мерон мере носимых цыки нк робота перемещает ( i xBri i нос v i роиv i во к ( IK пиа |ьном с то тл 1 Я н i а точи in t laiiobKii ia/кимных поверх i oi н и )о, 1 (не iiO(atan с набжепн )u н fan мо к in i н ЮМ1ИМИ с
0
ми ( зажимных бок 4 Упоры б выводят Hi проремеи 8, выполненных перпендикуляр- ( Т обратным пазам дополнительных на- правляющих 3 Включают привод захватного устройства на зажим или разжим губок 4, перемещая губки в нужном направ- пении по дополнительным направляющим 3 то совпадения упоров 6 с соответствующими прорезями, выполненными перпендикулярно дополнительных направляющих 3
При снятии роботом захватного устройства со стола наладочной установки упоры 6 освобождаются от действия выступов, под действием пружин 5 заходят в соответствую щие тл 6ления и фиксируют зажимные 4 в новом положении Захватное уст ройство готово для работы с новым типо ра шером деталей
Формула изобретения
0
Захватное стройство промышленного робота, содержащее корпус с приводом ли неиною перемещения, зажимные губки, ра шещенные на опорных направляющих, причем последние расположены в сквозных продотьных Т образных пазах с возмож костью перемещения вдоль них, отличаю щачч тем что, с целью расширения эксп т атационных возможностей, перпендику- тярно Т образным пазам выполнены попеQ речные прорек причем фиксаторы закреп- тс ны на каждой губке посредством планки и ииержат П образный vnop, одна полка которого может располагаться в поперечной прореш а т. взаимодействует с допол нитен.но введенной пружиной, расположен
пои меж и ней if планкой
5
