S в
3 J /9 С7 ; fff г 131.
ft . I I ГяЬ
Л-ИЭ
трШ ч ф
гз 7
& /jV/
J I
22
-17
сл
о
Изобретение относи ICH к машиностроению, в частности к автоматизированным сборочным .тиниям.
Цель изобретения рас1нирение технологических возможное rci) и 11овы1неиие надежности за счет возможности нереориен- танин изделия при руч}{()й сборке нутем ei o поворота относительно трех осей координат, а также повышения точности остановки н. штформы относите.1ьно сборочной ио- , что нозволяет повысить уровень автоматизации сборочных работ за счет внедрения роботов-манипуляторов.
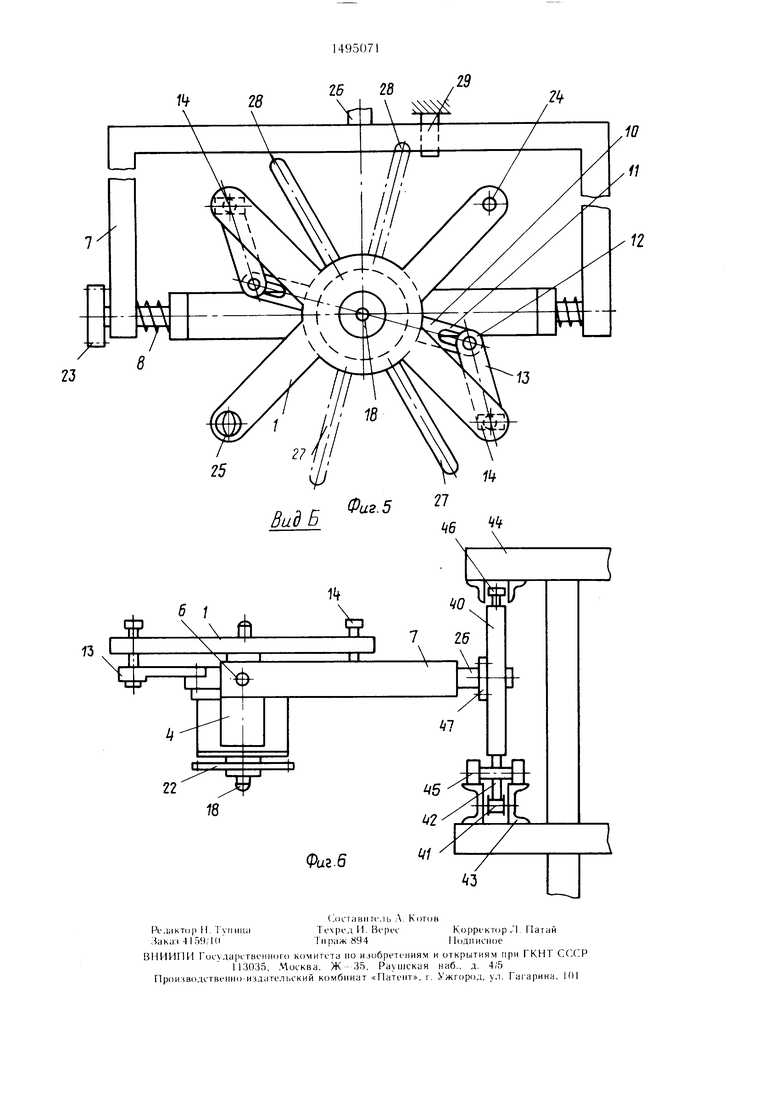
На фиг. 1 представлена предлагаемая система, оби1ий вид; на фиг. 2 то же, вид сверху; на фиг. 3 разрез .4-А на фиг. 2; на фиг . 4 развертка криволинейного паза; на фиг. 5 система с .X-образной нлат- формой, общий вид; на фи. 6 вид Б на фиг. I.
Транснортная система автоматизированной лииии сб)рки (фи1 . 1 ) содержит спутник, выполненный в 1и1де нлатфор.мы 1, установ,1енн()й на ноди1И11никах 2 в стакане ,Ч, жестко соединенной с коленчатой штангой 4, которая посредством цапф 5 и 6, расно.:|оженных в расточках, взаимодействует с рамой 7 с возможностью вращення н прод().1ьного перемени ния вдоль оси цапф 5 и 6 ) преде. 1ах ун11угой деформации амортизаторов 8.
Механизм фиксации изделий включает стакаи 3, на котором с возможностью по- В(.)рота уетанов.тено кольцо 9, с которым жестко связаны pi)i4aiH И) с пазами 11, ю- средством пальцев 12, неподвижно закреп- ,1енпых на р1)1чагах 1.3, прихватов 14, взаимодействующих с рыча|-ами 13.
Штанга 4 имеет |-нездо 15, взаимо.чей- ствуюшее с фиксаторамн Hi механизма 17 фиксации, установ,:1ен11()1() н-а позициях за- 1фузки и выгрузки изде.тий,а также на сборочных позициях автоматизированной ди- нии сборки.
11ериендику. 1ярно рабочей плоскости нлатфор.мы 1 проходит через сквозное отверстие подпружиненный стержень 18, в свободном состоянии своим буртом поджатый к крьипке пружпной 19, кото1)1з1Й может через рычаг 20 воздействовать на датчик 21 наличия изделия на нлатформе I. Для отсчета и фиксации углов поворота предусмотрены де;1ительные устройства 22 и 23. На платформе I распо, ожены .тементы в виде нальцев различного диаметра круглсм О 24 и срезанного 25 (фиг. 2). П-образная ра.ма жестко связана с горизонта.1ьно рас11о,тоженно11 осью 26.
Новоротное кольцо 9 снабжено для управления зажимным устройством элементами 27 и 28, которые могут взаимодействовать с управлякмцим устройством 29, выполненным, нанример, в виде упора или схвата манииулятора. Прихват 14 жестко
5
0
5
0
5
0
5
0
5
закре11,:1ен на ва. П Ж (фиг. 3), имеюп ем два na;ia - криволинейпый 31 и пря.мой 32 и размешенном в стакане 33 с возможностью пе- ремен1ения вдоль своей нродольной оси. Для предотвращения поворота вала 30 относительно стакана 33 служит палец 34, взаимодействующий с прямым пазом 32. Налец 34 обеспечивает также неподвижное соединение рычага 13 со стаканом 33. Палец 35 взаимодействует с криво. 1инейным пазом 31, неподвижно установлен в нлатформе 1, проходит через секторный паз 36 стакана 33 и нренятствует неремешению вала 30 под действием пружины Л7. Криволинейный про- фи,ть паза 31 содержит два участка, соединенных между собой плавным переходом (фиг. 4), участок 38 обеспечивает быстрый нод1И)д прихвата 14 к зажимаемому изде,:|ик), а ччасток 39 еамотор.можение прихвала при .(ажи.ме изделия.
Н. 1атф(рма 1 может быть выполнена .X-образной (фиг. 5).
Тележка имеет рамную конструкцию 40 (фиг. 6), связана с тяговым органом 41 при помощи сцепного устройства 42 и установлена на направляющих 43 копвейера 44 своими катками 45.
На верхней части те, 1ежки расположена каток-опора 4), предназначенная для удерживания тележки от опрокидывания.
Горизонта.1ьно расположенная ось 2ti разменц на с возможностью поворота отно- сите,1ьно своей геометрической оси рамной конструкции 40 тележки. Для отсчета и фиксации углов новорота оси 26 нредусмот- рено делительное устройство 47.
(лк тема pa6(jTaeT следуюншм образом.
В исходном 11();к)жении нлатформа 1 находится в 1()ри.«)нта,1ьном по. южении, прихваты 14 выдвинуты под действием пружины 37 в преде.т1)Ное вс|)хнее ноложение и строго ориентированы в заданном направлении благодаря тому, что палец 35 находи гея в самой крайне) (нижней на фиг. 4) точке участка 158 криволинейного наза 31. Нод действием пружины 19 стержень 18 выдвинут над базовой плоскостью платформы 1.
Когда фиксатор 16 паходится в гнезде 15. базовая дста.ть изде.тия (обьекта сборки) устанавливается на н, 1атформе 1 на устано- B04Hi ie пал1)ЦЫ 24 и 25. cBoeii пижней п.юс- костью нажимает на стержень 18, к()Т()рь1Й через рычаг 20 воздействует на датчик 21. Элемент 27 (или 28) унрав,тения, вынолнен- ный, например в виде рукоятки, вручную и,пи схвагом манипу.тятора, действующим по команде от датчика 21, переводится из положения а в ноложение б (фиг. 2). При эт ом кольцо 9 поворачивается но часовой стрелке, перемешает в том же направ.тении рычаги 10, которые воздействуют посредством пальцев 12 на рычаги 13 и поворачивают их против MacoBoii стрелки. Так как
рыч.и 1. /Ki4iK i tH/ii;iH (.(I гт;1к;11И)1 3.i ii)ii помощи iri.ii.u;i .M, Kotn n которой) входит в прямой lUM Л 2 .iii 30, io о.июнрименпо (. iioBopoKiM pi.i iara I. происходит iiono- poi B;I,I;I 3(1 и I laKaiia 33. (,окто|1ный на.) чакаиа 33 оо ч печи nan t (j ciioncnnijiii по- Hopoi in Н(ц-итс.1ьио ii.ui 1(()ормы I, так как палеи 35 п) че|нм crKTO)Mi)iii iiaj и nc прсиятч твуг iioiU)poT стакана 33, а вместе с и вада 30.
IkMiMcinne и.(()де11ствия iia, ibiia ЗГ) с криво,iniiciiiii, iia.toM 31 ва, 1а 30 И()с,ед- иий П(|. од11овре Н ИН() с В|)ип1ате,ты1ы i и 11ост па le,п.нос .1впж(. иие liiini, иpeo.i(i, ii - вая действие Г1)ужины 37. Прихват 14, сД1Моватедьно, в.чн сте с Ba,i().i 30 также со- i)e|iniai i иииговос движение , при :1том ско- )осгь его 1сре импе11ия вдо, i ь вертика,1ьп()й оси две сдупеии в соотвс rci вии с учас1ка |п .W п 39 М. п)ичем участ- KV 38 cool вегс I lucT Г)о,11,п1ая скорость (OI.ICT- рыи подв( д), а учас1к 39 скорость (зажутие) или рабочий ход. Места прижима и(делия, устаиовлеипою иа iia,ib- пы 24 и 2Г), находятся между па:и)вой по- 11Л() п,1агформы I и 11)ижимн()й поверхностью прихваюв 1-} и н)п ходе прихва- гов 14 вни ( ока ывак)тся ирижа11)1М11 к базовой поверхности n.iarijiojnibi I. l a;u )pc)t- то.т- П1инь1 а жимас мо о :1ле 1еита изде,п1я де,1яетс я геомег рическпми размерами участка 39 паза 31. .амопроизво. отжатие Н 1ихва1ов 14 нр(мот | рап1ается выбором уг- ,ia подьема ||р(1фи,1я ччасгка 39, обеспечивающем само1ормож1-иие iia, ibna 35 в па- : 31. Иа iiriv. i (ажима прихватами 14 ||.(де. П1Я иа п, la i Ь пме I, с помощью пиво- ро 1ио-де,1и Л ЬН1)1Х xciponciB ficex трех коор- дппа1П111х осей (а1|и1кс1;рова11иой в ropii.iOH- ia.ii.noM ||о,1ожении, заканчивается.
11о окоичаиии перечичцения :(.1емента 27 прав,1ения из И),1ожеиия и в по, 1ожение п (или у.темеита 2М) н отвода схвата мани- ихлятора в исходное положеиие дается команда на (|)иксат()ра Hi из гнезда-15. роисходит |)ас(()иксация иггангп 4, кот()|1ая под х прхгих амор i пза I opoB f .ta- нн.мает laBHoBenieH ное по. юженис отно1. И- те.1ьно ра.мь 7, и дается разрен1ение на движение с.и жки к с. К Ду HiiHeii иозипии, I д(. MO/KCI осу 1пс1,д в. |я I ься (. борка изде.тия с кан1о нпем его в ра1.тичн1,1х и,1оск()стях вмес те с п. I; Г(()ормо|1 I без и.меиеиия ус- .lUBnii .(ажатия oaionoii де1 али и с возв|)а- inenni M п. la Г(||ормь; 1 в исходное положеиие по окончаиш процесса сбо)1ки иа данной по- unniH llcu .inc с (ажатой ба.и)вой дета.тью iici)e ieinae rcvi noc. имонате.тьно с одной рабочей nouiiuni ,1пп1111 на другук п|)и ие 1еме- тении пмежск конвейера .ю ;i x пор, пока иа ЛИ1П(И не б.ич (aiu )in(4l прощч с сбо|1кп.
(.()б) П4. псргл гшае i ся на ио- tiiiuno pa.il (ки. стсржсм, 1 (S ч ере i рычаг 20 во (дсчк-1 иа да1чик 21, даюппп) коман i
0
4ч1ксируюшему Mexatiii3M 17 H,I 1|)ик.р1ик1 и,1атформы 1, и фиксатор hi ихо. пч : до 15. При иесовиадеиии оси фикс 11ора И) с осью гнезда 15 фиксатс)1 Hi in рс н И1ае1
П1ганг 4 в направ.1(. нии, napa,:i,iie, ibnoM 11аправ,1енин) движения KouBciiepa, нанфы 5 и ti ско,1Ь(Я1 при i) вд(мь своей оси огио сительис) рамы 7 и происходит упру-гая де- (}м1р 1ация ())тизат()ров 8. Штаига 4 иере мешаегся до ii(),iHoro с()В адения осей фик cai()a М) II гнезда 15, что происходи но окончании хода фиксатора вверх, иос,|е даегся команда иа разжим изделия По ()й команде устройство 20 ncpCMcniaei менг 28 управления и.( по.тожения ч н iio,;io5 жеиие а (и, 1и у, 1емент 27 из исхпожеиия б в 11о,1ожеиие а), 11|К)исх1)Д11т |1ово)от к(),чь- iia 9 вместе с рычагами 10 против часовой стрелки и поворот рычаг ов 13 но часовой стрелке. Вместе с рычагами 13 иоворачива- К)тся стаканы 33 и ва, 1Ы 30 с прихватами 14. Вс,1едств11е взаимодействии криво- ,1инейного иаза 31 ва, 1а 30 с иа,11)Ием 35 происходит поступательное движение ва,1а 30 вверх и осуществляется разжим 11зде,1ия, причем палец 34 скользит по прямому пазу ,32.
5 Пружииы 37 стремятся выто,тк11уть ва, 1Ы 30 вверх, в результате чего обеспечивается гарантированное занятие иальцем 35 исходного ио.южеиия в крайней (нижней) точке паза 38 при заданной д,1ине рабочею хода элемента 27 (нлп 28) управ,1ения ири отжа0 тии, меньшем на 3- 5 д,1ИИ1)1 раб()че1о хода () элемента при .(ажатии д,1Я предотв)а- нгення по,-1омок зажимного ycTjioiicTBa при работе с маиипу,1ятором. 11ри этом обеспечивается заданное ориентированное iio,io жение прихватов 14 в исходном по,1оже5 НИИ и процесс отжима .(аканчивается Пос- ,ie по,|учения команды, 1, игна,п1зиру кицей об окоичаиии ра.жима, соб|)аиное и.симие может быть сиято с платформ) 1 автома- 1ич1.ч К11м манину, 1ятором и отирав,1ено к
Q iecT i 6opa ютовых 11зде,1И11.
В автоматическом режиме разжатие ii.i- дс,1ия может 11|1оисх()дить таКЖ1 во время ие- ремеп1ения п,|атформы I с iioc.UMiieii рабо- че11 позиции иа ра.м рузочную. 1 этом c,iy- час э,1С Мент 28 у 11рав,1ения, находящийся
5 в но.южеини п. наезжает на унрав,1яюиич у гво 29 (в виде у nopal, хстаиов, icii- ное в этом с,тучае неподвижно, и ii|)n .твиже- нии те,1ежк11 вираво иерехнмцаегся ivu Bo, поворачивая ко,1ьцо 9 против 4acoBoii стре,|- кн. Поворот кольца 9 оканчивается по дос0 тиженин э,1емент()м 28 управ,тения по,1ож1 - пня а. при KorojMJM он выхо.игг из (а шчг И нпя с упо|)()М и можс проходи гь мимо iieio. 5 этом с,тучае с)трезок пути, 11ача,:о Koiopoio опреде,1яется моментом И1,|хода 11)ав,1яю|цег 10 устройства 29 (в видс nopai из .taniMi- лепия с э,1ементом 28, а KOIHTIгочкои
по ишпонирован ия на по.мщии ра., пдс.1И1 проходиг на n,iaTi) 1
в ранжиюм по.южснии, удор/киваясь от смешения относительно нлатформы установочными и;ит1 ца 1и 24 и 25. С.оответствую- HUIM )()м I еометрнческих параметров уирав.тяк)1нс 1 о ycijioiiciBa 29 в виде упора и элемента 28 :пог отрезок и|)актически может Г)ыть сведен к вес1Л1а ма.И)й ве.тичине, что в сочетании с прави;|ьи1)1м выбором скорости конвейера обеспечивает 6e;ioiiaciiyKj и безаварийную работу иред. 1а1 aeMoii систем1 1 на иочицни выгрузки.
1(рмула И липрсIснчя
. Траиснортная сиетеми автома i изиро- ванио) .1И11ИИ сборки, с()держан1ая конвейер, вдо.п, которого размеи1еиы сборочные иози- ции с те.тс жка 1И, каждая из KoTopiiix име- ei Bepiика.н.ио усганов. К них i на oiio|iHi)i н иаирав.1ЯК)1ни кагках. расно. южени ы.х е возможностью иеремепичшя но иаирав.тяюшим трассы KOHBciicpa. рамную конструкцию с размеи1енно11 на Heii с возможностью поворота иериеидику.тяри( |аи)ав.1ению сч иеремеик ния горн.юн la.ibHoii ос1)Ю. на кого- j)oit смонтирована также новоротная отно- сите.1ьно вергика. iiiHoii оси п.тагформа для креи.к иня собираемых и дели11. отличто- ща.чс.ч тем. чго. с ие.тью |)асн1ирения гех- но.тогических возможнос теГ н иовьииеиня надежности, KOHiieiiep снабжен механизмом фиксации и. 1ат(()()рм о i иосите.тьио сборочиых иозицнй, а каждая из те.тежек снабжена мехаиизмом 1)иксании нзде. шя на и.кпфор- ме н механизмом поворота 1,тат()орм1,| от- носите.тьио (nopoii i ()ризонта,1ьиой оси, пер- иендику..тярной к вышеуномянутой горизон- та.тьиои оси, выно.чиенным в внде , ось KoTopoii нара.ькмьна наирав.тению дви- /кения ге,1С Жки. и иаи()ы И1таигн установ- .leiH) в расточках П-образной рамы, жесгко связанной с I )ризонта.1Ы1О11 осью с возможностью HOBojioTa и нродо. установочного cMCHieiHui нианги.
0
5
0
5
ма, п)ичем механизм фиксации изде.чия иа платформе выполнен в виде жестко закреи- леии1)1х на иоследией устансжочных элементов и но крайней мере дву.х поворотиы.х 11|)ихватов, каждый из которых закреи.теи на вертикальном отиосите.() нлатформы ва- ,ту с криволииейнь1м и иродольиым иаза.мн но ()б)азую1ней, размен1еииом в стакане, иронушенном сквозь отверстия в н.татфор- ме и нлече дву11.1ечего рычага, установ.тен- ного иод и.татф()рмо11, ири этом стакан жестко связан с двуи.течнм j)i i4aroM иосред- ством пальца, одии конец которого иро- .ходит сквозь oTiu i ciiU в с такане i возможностью взаимодействия с иродольным ца- зом вала, и расположен с возможностью поворота относительно платформы, для чего в платформе закреплен enie один na. ieu. цронушеиньп сквозь секгориый паз. В1)1ио.1ненный в сгакане. с возможностью взаимодействия одним коицом с криво,1иней- нь1м назом Ba.ia. иричем на втором н.к че двунлечего )i,i4aia также |)азмен1ен иа.тец с возможност1,К1 взаимоде1К тв11Н с нр()до.и.нь1м назом дру|-()го рычага, жестко закреилеино- |() с уст аиов. К иным соосио оси 1И)вор()га н.1аи|)ормы 1акж(. и()во|К)1 |ц,1м ко.тьцом с возможностью обеснечеиия при иовороте ко,)- ца иоворога-выдвижеиия и,1и иоворота- задвижкн Ba.ia, нрижим oi носите.тьио ц,|ат- фо|)М1,1. а механизм (}1иксации и.1атф(фм относите.1ьно сборочн1 гх нозицнй .111ен в виде .|ожениьгх на штангах 1не(д и разме|цен1П)1х иа сборочиьгх иозициях с возможностью взаимоде1и-твия с гне.дами соответствующих н,1атформ выдвижнь1х фикса горов.
2.(л1стема но н. 1. агличающаяся тем. что установочные элемент1 1 выно.чнены в виде на.тьцев разного диаметра.
3.( истема по нн. 1 н 2, отличающаяся тем. что HI Ганга, на KOTOpoii размещена 11,та 1(, вЫ1И1Лиена ко.чснчато г
нн. 1 3. (гличан 1ци.яся
;v
J7

| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для изготовления из проволоки деталей типа штырей | 1984 |
|
SU1252008A1 |
| Многоцелевой гидравлический экскаватор А.Н.Абрамова и С.Г.Иноземцева | 1983 |
|
SU1265250A1 |
| Центробежная установка для испытания образцов | 1984 |
|
SU1249389A1 |
| Устройство для исследования вестибулярной системы животных | 1986 |
|
SU1466703A1 |
| Транспортное средство для перевозки сыпучих и штучных грузов | 1987 |
|
SU1495166A1 |
| Устройство для крепления канатной арматуры | 1986 |
|
SU1414945A1 |
| Устройство для кантования строительных изделий | 1987 |
|
SU1530472A1 |
| Многопозиционный станок для двусторонней обработки концов трубчатых электронагревателей | 1985 |
|
SU1344518A1 |
| Поворотный круг | 1983 |
|
SU1110701A1 |
| Подъемно-передаточное устройство | 1982 |
|
SU1063744A1 |

Изобретение относится к машиностроению ,в частности, к автоматизированным сборочным линиям. Цель изобретения - расширение технологических возможностей и повышение надежности. Это обеспечивается возможностью переориентации изделия при ручной сборке, для остановки платформы относительно сборочных позиций, что позволяет повысить уровень автоматизации сборочных работ за счет внедрения роботов- манипуляторов. Устройство содержит тележки, каждая из которых включает платформу 1, установленную на подшипниках 2 в стакане 3, жестко соединенную с коленчатой штангой 4, которая взаимодействует с П-образной рамой 7. Механизм фиксации изделия на платформе 1 имеет установочные элементы и поворотные прихваты 14, взаимодействующие с рычагами 13, каждый прихват 14 смонтирован жестко на подпружиненном валу, имеющем криволинейный паз, который обеспечивает фиксированное положение прихвата 14 при отжиме и самоторможении при зажиме. Для предотвращения поворота вала относительно стакана служит палец, взаимодействующий с прямым пазом. Палец проходит через сквозной секторный паз и препятствует перемещению вала под дествием пружины. 3 з.п. ф-лы, 6 ил.
Фие.З
31
Ik Фиг 5
Вид Б ,,c v
6
Z
1Q
,,c
6
