Изобретение-относится к измерительной технике и может быть использовано для измерения скорости и угла рыскания транспортного средства.
Цель изобретения - повышение точности измерения скорости за счет учета непараллельности направления движения транспортного средства и мерной базы, а также измерение угла рыскания, например. для компенсации погрешности токопривод- чикоо.
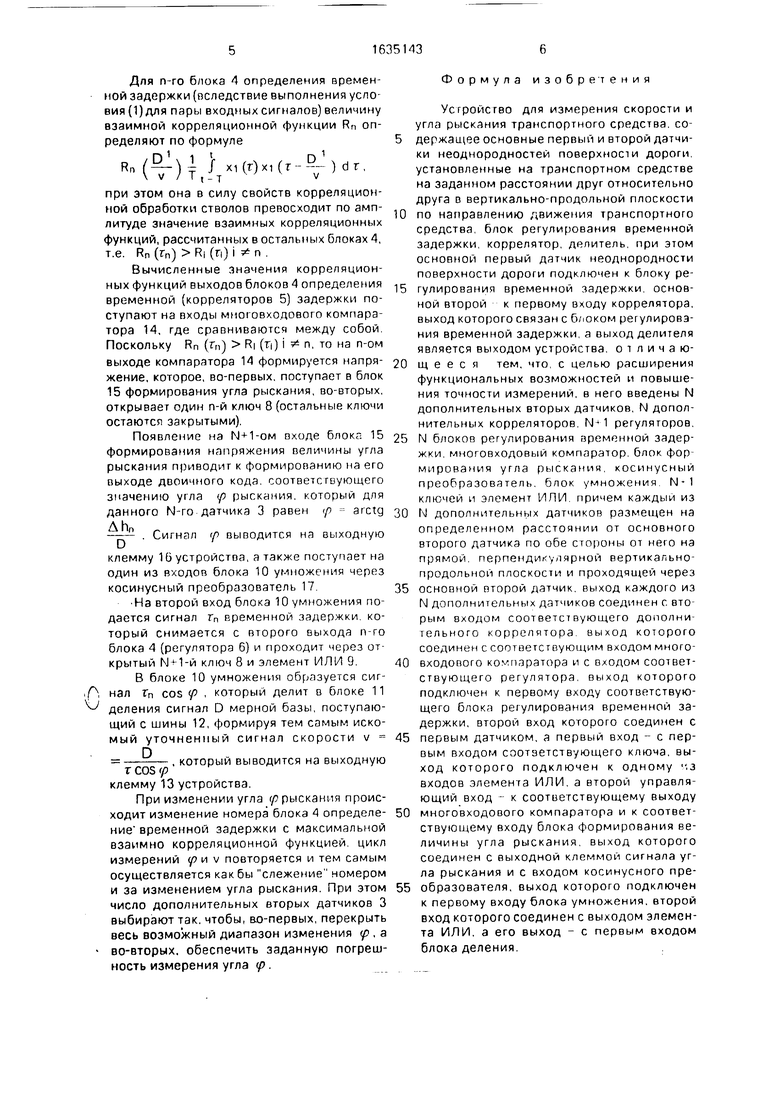
На чертеже изображена структурная схема предлагаемого устройства.
Устройство содержит первый датчик 1 и основной второй датчик 2 неоднородностей поверхности дороги, расположенные по направлению движения в вертикально-продольной плоскости на известной мерной базе D, дополнительные вторые датчики 3. размещенные на известном расстоянии от основного второго датчика 2 на прямой, перпендикулярной к вертикально-продольной плоскости и проходящей через датчик 2. Первый датчик 1 и каждый второй датчик 2(3) подключены к двум входам соответствующего блока 4 определения временной задержки, состоящего из последовательно включенных коррелятора 5, регулятора 6 и блока 7 регулирования временной задерж- ки. При этом один из входов блока 4 через соответствующий ключ 8, элемент ИЛИ 9. блок 10 умножения и блок 11 деления, у которого вход делимого соединен с шиной 12 сигнала величины Д, связан с выходной клеммой 13 сигнала скоросш, а второй выход блока 4 соединен с одним из входов многовходового компаратора 14. Каждый выход многовходового компаратора 14 подключен к управляющему вход оответству- ющего ключа 8, а также связан с одним из входов блока 15 формирования величины угла рыскания, выход которого подключен к выходной клемме 16 сигнала угла рыскания и через косинусный преобразователь 17 со-
единен с вторым входом блока 10 умножения.
Устройство работает следующим обра- зом.
При движении транспортного средства неоднородности поверхности дороги сначала фиксируются первым датчиком 1, а затем через определенные задержки времени - вторыми датчиками 2(3) В условиях наличия угла рыскания между скоростью и мерной базой неоднородности движутся от первого датчика 1 по траектории к определенному для данного угла (рп второму датчику 3, а сигнал xi(t) первого датчика 1 и сигнал X2n(t) n-то второго датчика 2 через время задержки, равное тп - ,, оказываются равными
друг другу:
X2n (t) Х1
( -Ј)
(1)
Каждая пара выходных сигналов от датчика 1 и одного из датчиков 2(3) поступает на два входа соответствующего блока 4 определения временной задержки В каждом блоке 4 определениявременной задержки в корреляторе 5 производится вычисление взаимной корреляционной функции RJ по формуле
R, (т,) xi(r)x2,(T-Ti)dt. (2)
1 t- Г
где Т - время наблюдения,
г, - время задержки сигнала xi(t) в i-й регулируемой линии задержки, управляемой i-ым регулятором, при котором величина Ri достигает своего максимального значения
При этом производится непрерывно подстройка регулятором 6 блока 7 регулирования временной задержки так, что на выходе корреллятора 5 поддерживается максимально возможная для данной пары сигналов величина R, (г,).
Для n-ro блока 4 определения временной задержки (вследствие выполнения условия (1) для пары входных сигналов) величину взаимной корреляционной функции Rn определяют по формуле
)ЛХ1(Т)Х1(Т)(1Т1
при этом она в силу свойств корреляционной обработки стволов превосходит по амплитуде значение взаимных корреляционных функций, рассчитанных в остальных блоках 4, т.е. Rn (гп) Ri (ri) i п .
Вычисленные значения корреляционных функций выходов блоков 4 определения временной (корреляторов 5) задержки поступают на входы мноювходового компаратора 14, где сравниваются между собой Поскольку Rn (Гп) RI (TI) i п, то на п-ом выходе компаратора 14 формируется напряжение, которое, во-первых, поступает в блок 15 формирования угла рыскания, во-вторых, открывает один n-й ключ 8 (остальные ключи остаются закрытыми).
Появление на N+1-ом входе блока 15 формирования напряжения величины угла рыскания приводит к формированию на его выходе двоичного кода, соответствующего значению угла р рыскания, который для данного N-ro датчика 3 равен уэ arctg
. Сигнал i/ выводится на выходную
клемму 16 устройства, а также поступает на один из входов блока 10 умножения через косинусный преобразователь 17
На второй вход блока 10 умножения подается сигнал гп временной задержки который снимается с второго выхода n-ro блока 4 (регулятора 6) и проходит через открытый ключ 8 и элемент ИЛИ 9.
В блоке 10 умножения образуется сиг- 4, нал rn cos p , который делит в блоке 11 деления сигнал D мерной базы, поступающий с шины 12, формируя тем самым искомый уточненный сигнал скорости v D
, который выводится на выходную
ь COS (р
клемму 13 устройства.
При изменении угла р рыскания происходит изменение номера блока 4 определение временной задержки с максимальной взаимно корреляционной функцией цикл измерений р и v повторяется и тем самым осуществляется как бы слежение номером и за изменением угла рыскания. При этом число дополнительных вторых датчиков 3 выбирают так. чтобы, во-первых, перекрыть весь возможный диапазон изменения р , а во-вторых, обеспечить заданную погрешность измерения угла р.
Формула изобретения
Устройство для измерения скорости и угла рыскания транспортного средства, содержащее основные первый и второй датчики неоднородностей поверхности дороги установленные на транспортном средстве на заданном расстоянии друг относительно друга в вертикально-продольной плоскости
по направлению движения транспортного средства, блок регулирования временной задержки, коррелятор, делитель, при этом основной первый датчик неоднородности поверхности дороги подключен к блоку регулирования временной задержки основной второй к первому входу коррелятора, выход которого связан с блоком регулирования временной задержки, а выход делителя является выходом устройства, отличающ е е с я тем, что с целью расширения функциональных возможностей и повышения точности измерений, в него введены N дополнительных вторых датчиков, N дополнительных корреляторов. N41 регуляторов,
N блоков регулирования временной задержки многовходовый компаратор блок формирования угла рыскания косинусный преобразователь, блок умножения N-1 ключей и элемент ИЛИ причем каждый из
N дополнительных датчиков размещен на определенном расстоянии от основного второго датчика по обе стороны от него на прямой перпендикулярной вертикально- продольной плоскости и проходящей через
основной второй датчик, выход каждого из N дополнительных датчиков соединен с. вторым входом соответствующего дополнительного коррелятора выход которого соединен с соответствующим входом многовходового компаратора и с входом соответствующего регулятора выход которого подключен к первому входу соответствующего блока регулирования временной задержки, второй вход которого соединен с
первым датчиком, а первый вход - с первым входом соответствующего ключа, выход которого подключен к одному ,з входов элемента ИЛИ, а второй управляющий вход - к соответствующему выходу
многовходового компаратора и к соответствующему входу блока формирования величины угла рыскания, выход которого соединен с выходной клеммой сигнала угла рыскания и с входом косинусного преобразователя, выход которого подключен к первому входу блока умножения, второй вход которого соединен с выходом элемента ИЛИ. а его выход - с первым входом блока деления.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ КОРРЕЛЯТОР | 1991 |
|
RU2051413C1 |
| Коррелятор | 1987 |
|
SU1444813A1 |
| КОРРЕЛЯЦИОННЫЙ РАСХОДОМЕР | 1991 |
|
RU2010167C1 |
| Устройство для измерения скорости и угла рыскания транспортного средства | 1988 |
|
SU1714518A1 |
| Коррелятор | 1976 |
|
SU599272A1 |
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЕТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 1992 |
|
RU2027195C1 |
| Корреляционное устройство для измерения времени задержки | 1990 |
|
SU1795474A1 |
| УСТРОЙСТВО ДЛЯ АДАПТИВНОГО ПОДАВЛЕНИЯ ПОМЕХ | 1990 |
|
SU1802616A1 |
| Коррелятор свч | 1974 |
|
SU490131A1 |
| УСТРОЙСТВО ДЛЯ ГЕОЭЛЕКТРОРАЗВЕДКИ | 1999 |
|
RU2158016C2 |
Изобретение относится к измерительной технике и решает задачи повышения точности измерения скорости и определения угла рыскания и расширения функциональных возможностей для наземных транспортных средств Целью изобретения является повышение точности измерения При движении транспортного средства каждая пара сигналов от первого датчика 1 и от основного 2 или одного из дополнительных вторых датчиков 3 неоднородностеи поверхности дороги, расположенных так. что датчики 1 и 2 размещены в вертикально- продольной плоскости на известной мерной базе, а датчики 3 - на известном расстоянии от датчика 2 по обе стороны от него на прямой, перпендикулярной вертикально- продольной плоскости проходит корреляционную обработку в блоках 4 определения
| Белоглазое И Н , и др Основы навигации по геофизическим полям | |||
| М : Наука, 1985 | |||
| с | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
