Изобретение относится к измерительной технике и может быть использовано в системах измерения скорости и пройденного пути преимущественно для наземных транспортных средств.
Целью изобретения является повышение точности и надежности измерения.
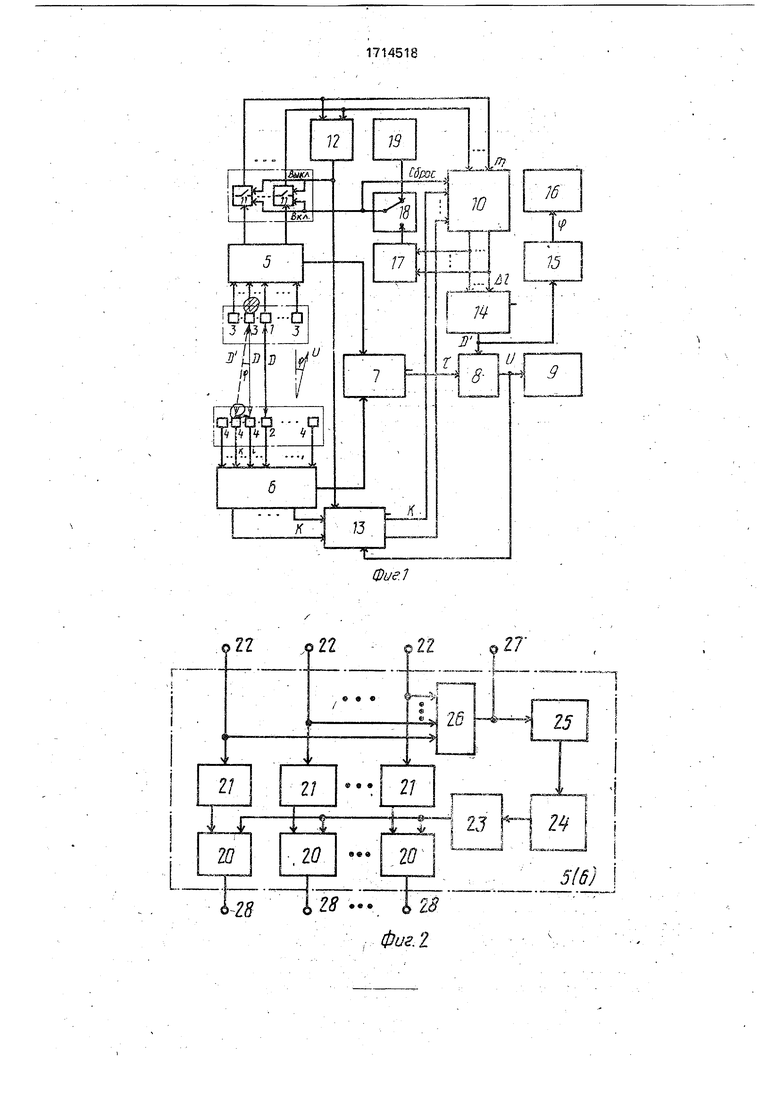
На фиг. 1 представлена структурная схе-ма предлагаемого устройства; на фиг. 2 структурная схема варианта блока выделения сигнала первого сработавшего датчика; на фиг. 3 - вариант выполнения блока временной селекции; на фиг. 4 - вариант выполнения блока определения смещения.
Устройство для измерения скорости и угла рыскания транспортного средства содержит первь1й 1 и второй 2 основные датчики неоднородностей поверхности дороги, расположенные по направлению движения в вертикально-продольной плоскости на известном расстоянии D друг от друга. Дополнительные первые 3 и дополнительные вторые 4 датчики неоднородностей поверхности дороги размещены на известном расстоянии друг от друга на прямых.
перпендикулярных к вертикально-продольной плоскости и проходящих соответственно через основные первый 1 и второй 2 датчики. Причем .соответствующие дополнительные первые 3 и вторые 4 датчики (например, т-й первый и i-й второй датчики) расположены по направлению движения на известной мерной базе D, Каждые первый 1 (3) и второй2 (4) датчики подключены к одному из входов соответственно первого 5 и второго 6 блоков выделения,сигнала первого сработавшего датчика, вторые выходы которых через блок определения временной задержки 7 и блок деления 8 подключены к входу индикатора скорости 9. Первые входы блока определения смещения 10 подключены через управляемые ключи 11 к соответствующим первым выходам блока 5, а также к входам первого элемента ИЛИ 12. Вторые входы блока 10 через блок временной селекцйи 13 связаны с соответствующими первыми выходами блока 6. Выходы блока 10 через блок 14 формирования значения базы и вычислитель угла рыскания 15 соединены с входом индикатора угла рыскания 16, а через второй элемент ИЛ И 17 и двухпозиционный переключатель 18, второй вход которого связан с выходом источника сигнала начальной установки 19, подключен к вторым входам включения ключей 11.
Блок выделения сигнала первого С эаботавшего датчика 5 (6) (см. фиг. 2) может быть выполнен, например, в виде элементов И 20 по числу датчиков, один из входов каждого из которых через соответствующий пороговый элемент 21 подключек к одному первому входу 22 блока 5 (6), а вторые объединенные входы через линию задержки 23, элемент НЕ 24, пороговый элемент 25 и элемент ИЛИ 26 соединены с первыми входами 22 блока 5 (6). Выход элемента ИЛИ 26 соединен с вторым выходом 27 блока 5 (6), а выходы элементов И 20 связаны с соответствующими выходами 28 блока 5 (6).
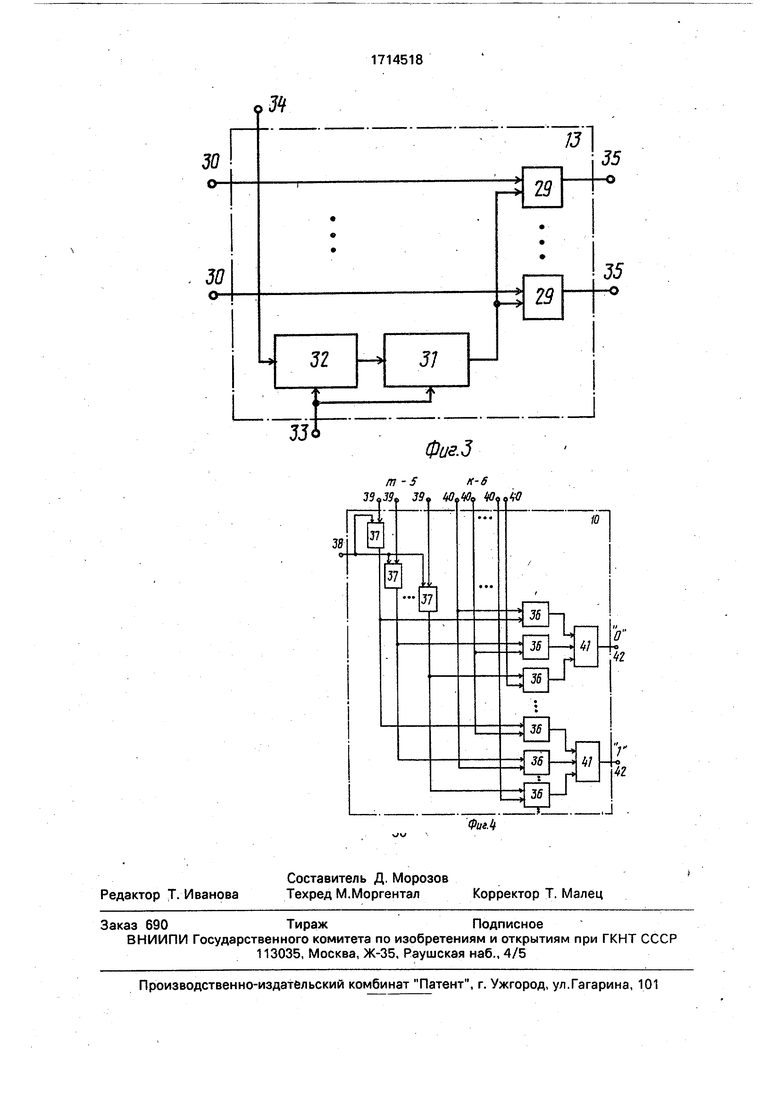
На фиг. 3 показан вариант выполнения блока временной селекции 13 в виде элементов И 29. один вход каждой из которь(1х подключен к одному из первых входов 30 блока 13, а вторы.е объединенные входы через генератор строба 31 и управляемую линию задержки 32, вторые управляющие входы которых связаны с третьим входом
33блока 13, соединены с вторым входом
34блока 13. Выходы элементов И 29 подключены к соответствующим выходам 35 блока 13.
Блок определения смещения 10 (фиг. 4) может быть выполнен (приусловии равенства Д1 расстояний между соседними первыми 1 (3) и вторыми 2 (4) датчиками) в виде групп элементов И 36. В каждой группе количество элементов И 36 определяется числом пар датчиков, образованных одним первым 1 (3) и одним вторым 2 (4) датчиками, имеющих одинаковое расстояние между собой. Одним входом элемент И 36 через один из триггеров 37,,вторые входы сброса которых связаны с третьим входом 38 блока 10, подключены к соответствующим первым входам 39 блока 10, а вторым входом - к соответствующим вторым входам 40 блока 10. Выходы элементов И 36 одной группы через элемент ИЛ И 41 подключены к одному из выходов 42 блока 10, при этом число элементов ИЛИ 41 (выходов блока Ю) равно числу возможных значений базы D . В этом случае блок 14 формирования значения базы может быть выполнен в виде диодной матрицы, число входов которой равно числу выходов блока определения смещения 10, а число выходов - числу разрядов, необходимых для кодирования возможных значений базы D
Устройство работает следу|рщим образом.
С началом измерений производятся замыкание управляемых ключей 11 и сброс триггеров 37 блока 10 в нулевое состояние, для чего на их вторые входы с помощью двухпозиционного переключателя 18 подается напряжение от источника сигнала начальной установки 19. Затем переключатель 18 переводится во второе положение, соответствующее замыканию выхода элемента ИЛИ 17с вторым входом ключей 11.
При движении транспортного средства в условиях наличия угла рыскания (f между направлением (скоростью) движения и мерной базой (вертикально-продольной плоскостью) неоднородность поверхности дороги фиксируется сначала т-м первым датчиком 1 (3) и затем соседними к нему первыми датчиками, а через временную задержку Г регистрируется сначала к-м вторым датчиком 2 (4) и затем соседними вторыми датчиками.
Выходные сигналы от сработавших датчиков 1 (3) и 2 (4) поступают на входы соответственно блоков 5 и 6 выделения сигнала первого сработавшего датчика (см. фиг. 2). В блоке 5 (6) сигнал от т-го (к-го) первого, сработавшего датчика первым проходит через элемент ИЛИ 26 и пороговый элемент 25 (который вместе с пороговыми элементами 21 обеспечивает исключение шумового фона из сигналов датчиков), преобразуется в элементе НЕ 24 в сигнал противоположной
полярности, задерживается в линии задержки 23 на время Тф, приблизительно равное времени фронта сигналов датчиков, поступает на вторые входы элементов И 20 и запирает их на все время поступления сигналов отдатчиков. При этом наличие времени Гф обеспечивает прохождение с выхода т-го(к-го) элемента И 20 только фронта сигнала m-ro (ктго) первого сработавшего датчика на соответствующий т-й (к-й) первый выход 28 блока 5 (б).
Поскольку второй выход 27 блока 5 (6) подключен к выходу элемента 26, то на нем формируется суммарный сигнал от сработавших датчиков 1 (3) и 2 (4). Суммарные сигналы датчиков с вторых выходов 27 блоков 5 и 6 с интервалом г поступают на два входа блока определ,ения временной задержки 7, где в обычном порядке определяется временная задержка т. Выходной сигнал т блока 7 подается на вход делителя блока деления 8.
Параллельно с определением времени задержки производится уточнение мерной базы D Для этого сформированный на т-м первом выходе 28 блока 5 сигнал проходит через замкнутый управляемый ключ 11, элемент ИЛИ 12 и поступает на третьи входы ключей 11 для их размыкания (тем самым обеспечивается защищенность цепей определения D от воздействия других сигналов). Кроме того, указанный сигнал с т-го первого выхода блока 5 подается на т-й первый вход блока определения смещения 10 (см. фиг. 4), где он перебрасывает т-й триггер 37, а также через второй вход 34 блока временной селекции 13 (см. фиг. 3) поступает на вход управляемой линии задержки-32.
Блок временной селекции 13 обеспечивает временную селекцию сигнала с к-го выхода блока 6 для повышения помехозащищенности устройства. В блоке 13 сигнал с тто первого выхода блока 5 задерживается в управляемой линии задержки 32 на величину
г,О.
3 V V
где AV - максимально возможное для данного типа транспортного средства изменение скорости за среднее время г;
V - сигнал скорости, поступающий на управляющий вход 33 линии задержки 32 с выхода блока деления 8.
Задержанный в линии задержки 32 сигнал запускает генератор строба (управляемый одновибратор) 31, который генерирует
селектирующий строб длительностью
AV 2D -2 Селектирующий строб открывает
элементы И 29 для прохождения сигнала с к-го первого выхода блока б на
, D f, Ду
(-(1 временной интервал
V V
fd-b
) ) .. Очевидно, что другие
сигналы, которые могут сформироваться за время г, выступающие как помехи при определении D не проходят через элементы И 29, что повышает помехозащищенность устройства.
Отселектированный в блоке 13 сигнал к-го выхода блока поступает на к-й второй вход 40 блока определения смещения 10 (см. фиг. 4). В самом общем виде блок 10 представляет собой запоминающее устройство, в котором номерам тик ставится в соответствие значение смещения AL.
Блок 10, выполненный для случая равенства расстояний между соседними датчиками Д1, работает следующим образом. Сигнал с к-го второго входа проходит через соответствующий элемент И 36, на второй вход которого подается сигнал от включенного т-м сигналом блока 5 триггера 37, и элемент ИЛИ 41, вследствие чего на одном выходе блока 10, соответствующем смещению AL /i - к/ А|, формируется сигнал.
Сформированный таким образом сиг5нал подается на соответствующий смещению /i - к/ AI вход блока 14 формирования значения базы 14, где он, например, с помощью диодной матрицы преобразуется в соответствующее величине D D + AL
0 значение кода, которое выдается на вход делимого блока деления 8 и на вход вычислителя угла рыскания 15.
В блоке 8 осуществляется деление уточненного значения величины мерной базы D
5 на найденную в обычном порядке величину задержки т. При этом выходной сигнал блока 8, равный искомому значению скорости, отображается на индикаторе 9. В свою очередь, в вычислителе 15 производится вычис0ление угла рыскания, например, по формуле
(р arccos -г после чего найденное значеD
ниеугла рыскания отображается на индика5 торе 16.
При этом сигнал с выхода блока 10 проходит также через элемент ИЛИ 17, замкнутый переключатель 18 и поступает на вторые входы ключей 11 и третий вход блока 10. Он замыкает ключи 11 и сбрасывает
триггеры 37 блока 10 в нулевое состояние, тем самым приводя устройство в исходное состояние для дальнейших измерений.
Формула изобретения 1. Устройство для измерения скорости и угла рыскания транспортного средства, содержащее основные первый и второй датчики неоднородностей поверхности дороги, установленные на транспортном средстве на заданном расстоянии друг относительно друга в вертикально-продольной плоскости по направлению движения, дополнительные вторые датчики, размещенные на определенном расстоянии от основного второго датчика по обе стороны от него на прямой, перпен цикулярной к вертикально-продольной плоскости и проходящей через основной второй датчик, управляемые ключи, выходы которых связаны входами первого элемента ИЛИ, блок определения временной задержки, а также блок деления, отличающееся тем, что, с целью повышения точности и надежности измерений, оно снабжено дополнительными первыми датчиками неоднородности, размещенными на определенном расстоянии от основного первого датчика по обе стороны от него на прямой, перпендикулярной вертикальнопродольной плоскости и проходящей через основной первый датчик, первым и вторым блоками выделения сигнала первого сработавшего датчика, блоком определения смещения, блоком формирования значения базы, блоком временной селекции, источником сигнала начальной установки, двухпозиционным переключателем, вторым элементом ИЛИ, вычислителем угла рыскания и индикаторами угла рыскания и скорости, причем соответствующие одинаково размещенные относительно основных датчиков дополнительные первые и вторые датчики расположены друг от друга по направлению движения на известной мерной базе, выходи первых датчиков через первый блок выделения сигнала первого сработавшего датчика связаны со входами управляемых ключей, число которых равно числу первых датчиков , а выходы управляемых ключей через блок определения смещения, вторые входы которого через блок временной селекции и второй блок выделения сигнала первого сработавшего датчика
подключены к выходам вторых датчиков, и блок формирования значения базы подсоединены к первому входу блока деления и входу вычислителя yrjiia рыскания, выход которого соединен с входом индикатора угла
0 рыскания, выходы блока определения смещения также через второй элемент ИЛИ, и двухпозиционный переключатель, второй вход которого coeдинe j с выходом источника сигнала начальной установки, подключены к третьему входу блока определения смещения и вторым входам выключения управляемых ключей, третьи входы выключения которых соединены с выходом первого элемента ИЛИ, при этом второй и третьи
0 входы блока временной селекции связаны соответственно с выходами первого элемента ИЛИ и блока деления, который подключен к входу индикатора скорости, а вторые выходы первого и второго блоков
5 выделения сигнала первого сработавшего датчика подключены соответственно к первому и второму входам блока определения временной задержки, выход которого подключен к второму входу блока деления.
2. Устройство поп. 1,отличающеес я тем, что блок выделения сигнала первого сработавшего датчика неоднородностей выполнен в виде элементов И, число которых
5 равно числу соответствующих датчиков неоднородностей, при этом первый вход каждого из элементов И через пороговый элемент подключен к одному из раздельных входов блока выделения сигнала, а объединенные
0 вторые входы элементов И через линию задержки, элемент НЕ и пороговый элемент соединены с выходом элемента ИЛИ, каждый вход которого подключен к одному из раздельных входов блока выделения сигнала, а
5 выход - к второму входу блока выдедения сигнала, причем выход каждого элемента И подключен к одному из раздельных первых выходов блока выделения сигнала.
: Фиг.г
JJ
Физ.З

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения скорости и угла рыскания транспортного средства | 1988 |
|
SU1635143A1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СВЕРХЗВУКОВОГО НИЗКОЛЕТЯЩЕГО ОБЪЕКТА ПО СЛЕДУ НА МОРСКОЙ ПОВЕРХНОСТИ | 2010 |
|
RU2421751C1 |
| Устройство для определения параметров динамического звена | 1983 |
|
SU1160372A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОБЪЕМНОГО РАСХОДА ЖИДКОСТИ | 1991 |
|
RU2012848C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ПОВЕРХНОСТНОГО ВОЛНЕНИЯ | 1990 |
|
RU2018873C1 |
| УСТРОЙСТВО АДАПТИВНОГО КОДИРОВАНИЯ И ДЕКОДИРОВАНИЯ | 2000 |
|
RU2169431C1 |
| Устройство для автоматической маркировки железнодорожных единиц подвижного состава | 1987 |
|
SU1507633A1 |
| Устройство для измерения чистого запаздывания инерционного звена | 1984 |
|
SU1236430A1 |
| Устройство для измерения скорости движения объекта | 1990 |
|
SU1780015A1 |
| АНАЛИЗАТОР ПАРАМЕТРОВ ДВИЖЕНИЯ ЛОКОМОТИВА | 2012 |
|
RU2526730C2 |
Изобретение относится к измерительной технике. Цель изобретения - повышение точности измерения.скорости и определение угла рыскания преимущественно для наземных транспортных средств. Суммарные сигналы первых 1
| Кипятильник для воды | 1921 |
|
SU5A1 |
