Изобретение относится к станкостроению, в частности к устройствам для регулирования хода сбалансированных приводов для выполнения возвратно-поступательного движения на суперфинишных станках.
Известно устройство для суперфинишной обработки (авт. св. СССР № 812338, кл. В 24 В 35/00, 1981), с помощью которого значение хода возвратно-поступательного движения регулируется путем изменения значения эксцентриситета между эксцентричными втулками и эксцентричными шейками вала. Для этого необходимо ослабить гайку, причем муфта под воздействием пружины немного перемещается налево и вал объединяется с гильзой. Путем вращения шкива вал вращает эксцентричные втулки, соединенные с помощью пальцев с гильзой относительно эксцентричных шеек вапа. Значение хода возвратно-поступательного движения регулируется с помощью лимба. Затем затягивают гайку. Недостатками данного устройства являются сложность регулирования значения хода возвратно-поступательного движения, а также изменения эксцентриситета. Вследствие изменения эксцентриситета расстояние между инструментальными каретками не стабильно.
Цель изобретения - повышение произ- водительностии и упрощение регулирования хода возвратно-поступательного движения.
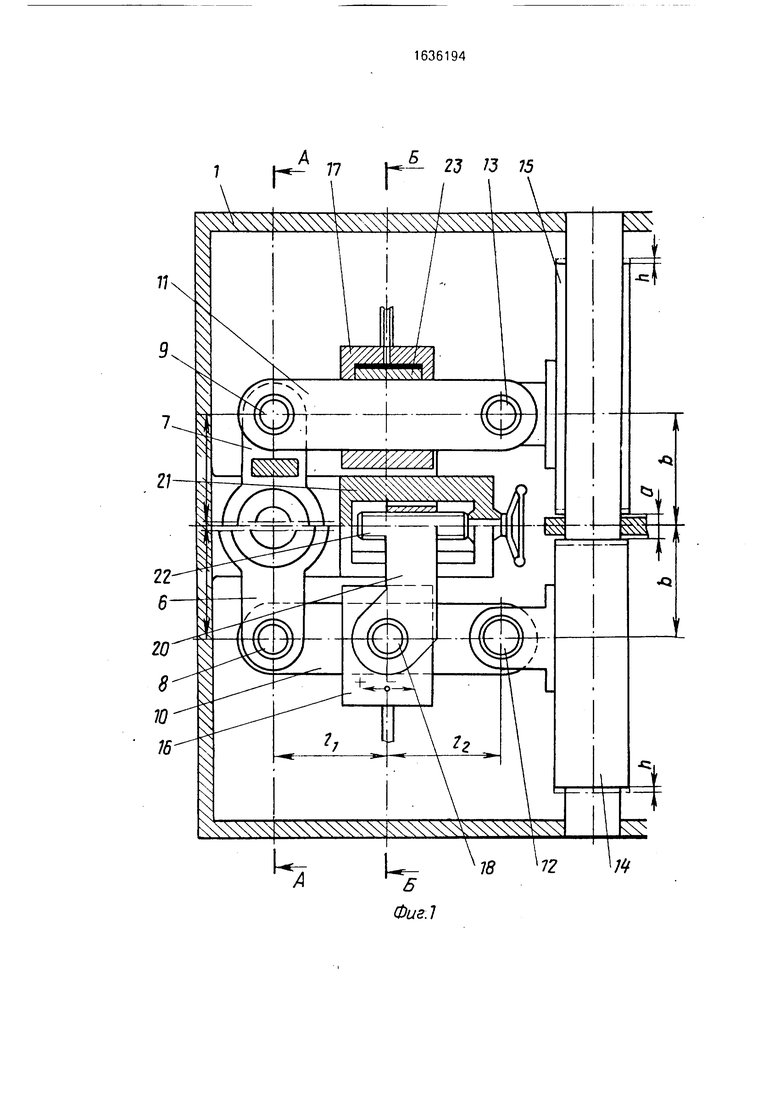
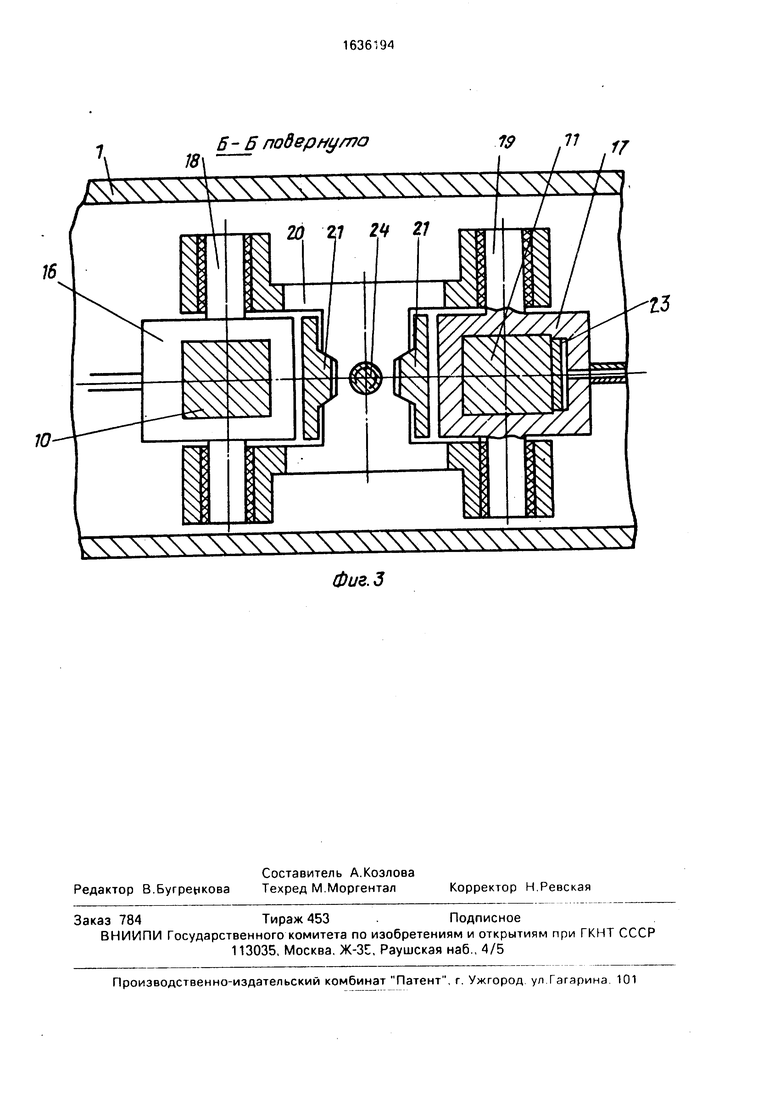
На фиг.1 изображено устройство для регулирования хода, разрез; на фиг.2 - разрез А-А на фиг. 1; на фиг.З - разрез Б-Б на фиг 1.
В корпусе 1 расположен коленчатый вал 2 в неподвижных корпусах подшипников 3. Коленчатый вал 2 имеет эксцентриковую цапфу 4 и две противолежащие ей эксцентриковые цапфы 5. На эксцентриковой цапфе 4 расположен шатун 6, а на эксцентриковой цапфе 5 - шатун 7. Шатуны 6 и 7 находятся на эксцентриковых цапфах 4 и 5 в подшипниках качения или в гидростатических подшипниках. Через цапфы 8 и 9 шатунов рычаги 10 и 11 связаны с шатунами 6 и 7.
Противоположные концы рычагов связаны с помощью болтов 12 и 13 с резцовыми салазками 14 и 15. Рычаги 10 и 11 установлены в подшипниках 16 и 17. которые охватывают рычаги 10 и 11 в виде манжет и в свою очередь своими коренными цапфами 18 и 19 находятся в Н-образном корпусе подшипника 20. Корпус подшипника 20 расположен вертикально в неподвижной направляющей 21 и может перемещаться в вертикальном направлении с помощью ходового винта 22. Этим регулированием перемещаются цапфы 18 и 19 подшипников 16 и 17 и рычаги 10 и 11. В результате этого меняются длины И и 2 и коэффициент
трансформации между ходом шатуна е и ходом h резцовых салазок 14 и 15.
После регулирования величины хода h подшипники 16 и 17 зажимаются с рычагами 10 и 11 гидравлически с помощью зажимных
поршней 23 или другим способом, например механически с помощью нажимной пружины. Цапфы 8,9,18 и 19 и болты 12 и 13 находятся в гидростатических подшипниках или посредством эластичной опоры (например сайлентвтулки или других подходящих опор) связаны с. соответствующей сопряженной деталью.
Эксцентриситет с цапф 4 и 5 подшипника выбран как среднее геометрическое
значение между минимальным и максимальным ходами h. Таким образом можно найти самые благоприятные длины рычагов И и 2 и длину перемещения центров цапф 18 и 19. Длина шатуна определяется
как разность между расстоянием центра вращения b и эксцентриситетом е цапфы. Таким образом минимальное расстояние а между резцовыми салазками остается неизменным и не зависит от регулируемого
размера хода h. Четко находящиеся друг против друга цапфы 4 и 5 достигают точной балансировки(в условиях точного определения массы и центровки), так что система внешне остается стабильной.
Формула изобретения Устройство регулирования хода сбалансированных приводов возвратно-поступательного движения. содержащее
коленчатый вал 2 с эксцентриковыми цапфами 4 и 5. несущими шатуны 6 и 7, установленные с возможностью взаимодействия посредством своих цапф 8 и 9 с резцовыми салазками 14 и 15. отличающееся тем,
что, с целью упрощения регулирования хода и повышения производительности, устройство снабжено Н-образным корпусом 22. рычагами 10 и 11, размещенными между цапфами шатунов 6 и 7 и резцовыми салазками. и установленными с возможностью перемещения на рычагах 10 и 11 и фиксации с помощью механических или гидравлических средств охватывающими рычаги хомутами 16 и 17 с коренными цапфами 18 и 19,
расположенными в Н-образном корпусе, смонтированном с возможностью перемещения на введенных в устройство неподвижных направляющих 23 посредством ходового винта 24
П
23 3 К
14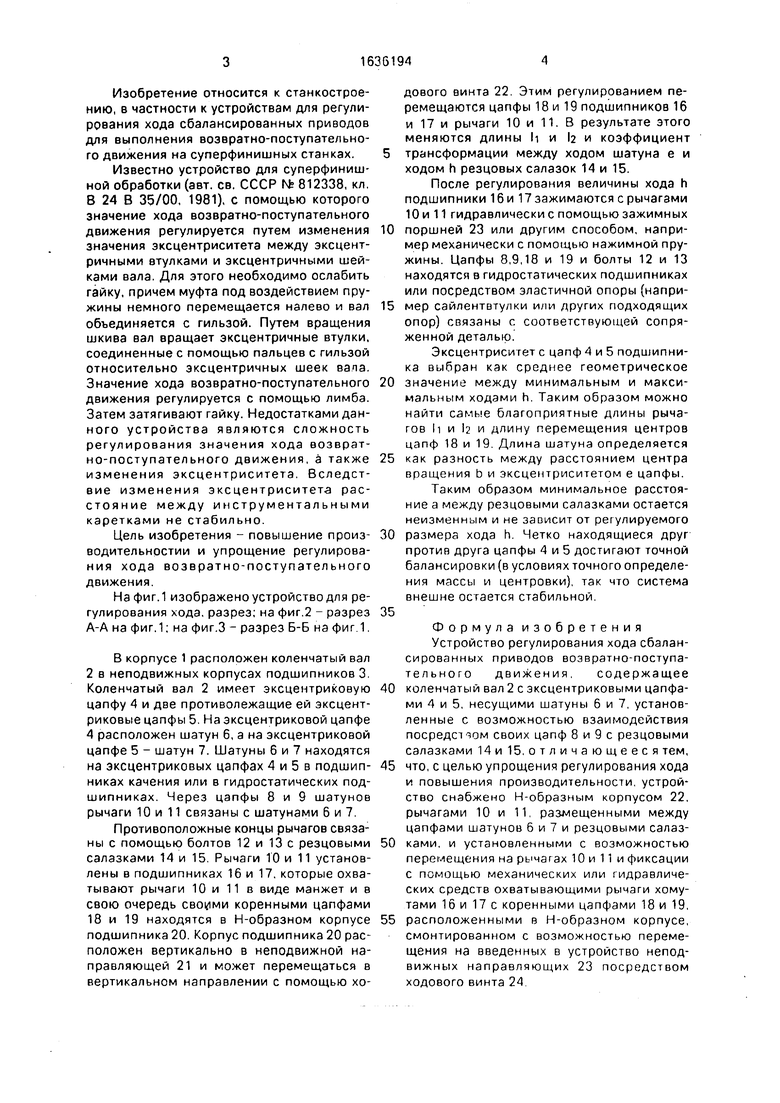
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для суперфиниширования | 1985 |
|
SU1291377A1 |
| Устройство для суперфиниширования | 1979 |
|
SU812538A2 |
| ИСПЫТАНИЙ НА УСТАЛОСТЬ | 1967 |
|
SU192452A1 |
| Поршневая машина Потапова | 2021 |
|
RU2756798C1 |
| ШЕСТЕРЕННЫЙ БЕСШАТУННЫЙ МЕХАНИЗМ С МНОГОКОЛЕНЧАТЫМ ВАЛОМ | 2013 |
|
RU2537073C1 |
| Станок для контурного кругового строгания зубчатых деталей | 1981 |
|
SU1024188A1 |
| Устройство для суперфинишной обработки деталей | 1986 |
|
SU1404300A1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ С БЕССТУПЕНЧАТЫМ РЕГУЛИРОВАНИЕМ ДЛИНЫ ХОДА ВЫХОДНОГО ЗВЕНА | 1992 |
|
RU2067234C1 |
| Осциллятор для генерирования продольных механических колебаний | 2021 |
|
RU2751497C1 |
| ПОРШНЕВАЯ МАШИНА | 2001 |
|
RU2254488C2 |
Изобретение относится к станкостроению и может быть использовано на суперфинишных станках. Цель изобретения - повышение производительности и упрощение регулирования-хода возвратно-поступательного движения. На эксцентриковой цапфе 4 расположен шатун 6, а на эксцентриковой цапфе 5 - шатун 7. Через цапфы 8 и 9 шатунов рычаги 10 и 11 связаны с шатунами 6 и 7. Рычаги 10 и 11 установлены в подшипниках, которые охватывают рычаги 10 и 11 в виде манжет и своими коренными цапфами находятся в Н-образном корпусе подшипника. 3 ил. . (Л С о СО О о 4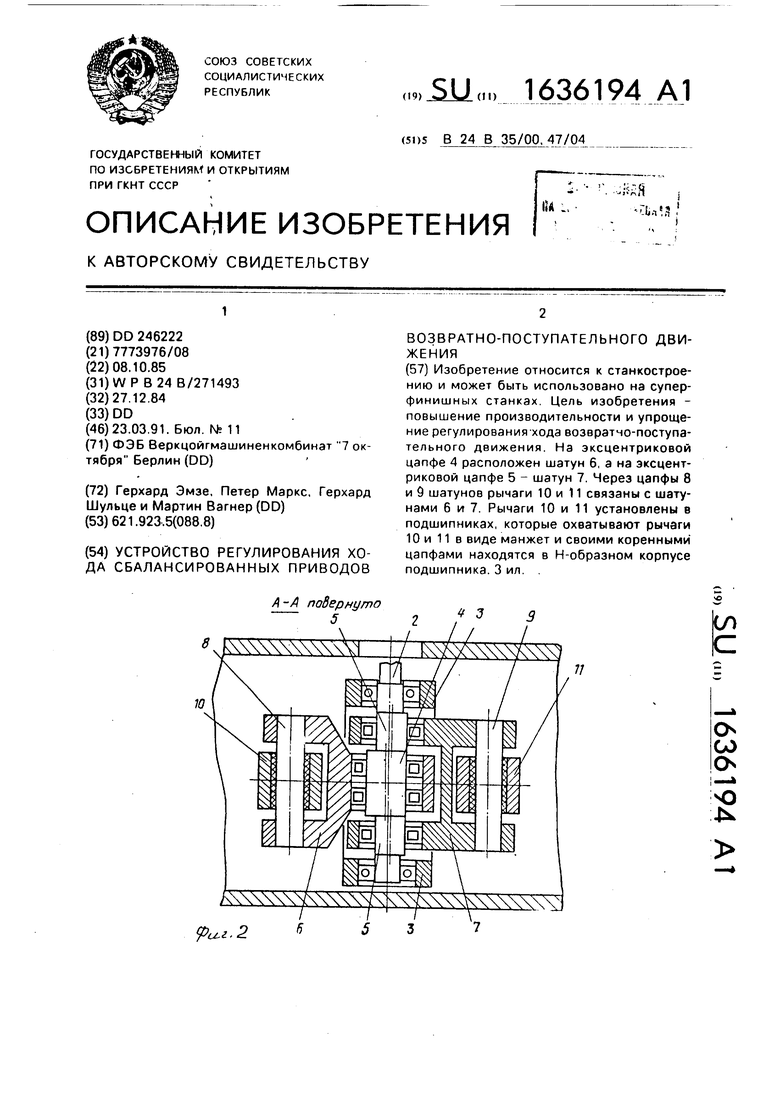
Фиг.1
Б- Б подернуто
Фиг.З
19
77
