Изобретение относится к горному делу и строительству и может быть использовано для образования горизонтальных скважин малого диаметра с криволинейной траекторией.
На фиг. 1 изображен проходческий робот, общий вид; на фиг.2 узел I на фиг.1; на фиг.3 сечение А-А на фиг.2; на фиг.4 сечение Б-Б на фиг.2; на фиг. 5 узел II на фиг.1; на фиг.6 сечение В-В на фиг.5.
Проходческий робот содержит буровую головку, состоящую из передней 1 и задней 2 секций, связанных между собой посредством управляемого отклонителя. Управляемый отклонитель состоит из трех шарнирных механизмов, расположенных через 120о по поперечному сечению. Входные звенья 3 шарнирных механизмов связаны с задней секцией 2 буровой головки, а выходные звенья 4 с ее передней секцией 1.
Каждый шарнирный механизм содержит сферический шарнир, состоящий из шара 5 и подпятника 6. Подпятник 6 жестко связан с входным звеном 3 и имеет ширину, несколько меньшую, чем ширина рабочей части шара 5. При этом образованы зазоры 7 и 8 между корпусом подшипника 6 и входным звеном 3. Шар 5 выполнен полым и полостью жестко установлен на пальце 9 по его центру. Ось пальца 9 перпендикулярна радиусу робота, проходящего через этот центр. Палец 9 установлен жестко в эксцентричных втулках 10, являющихся промежуточным звеном. Втулки 10 установлены с возможностью вращения на выходном звене 4, при этом ось вращения втулок относительно звена 4 перпендикулярна радиусу робота и расположена эксцентрично по отношению к поперечной оси сферического шарнира.
Выходное звено 4 выполнено в виде вилки, между щеками которой размещен конец входного звена 3. Для обеспечения необходимой конструктивной жесткости звена 3 при уменьшении продольного габарита шарнирного механизма торец звена 3 упирается в дно вилки звена 4 и выполнен сферическим для возможности обкатывания по дну вилки.
Входные звенья 3 связаны с силовыми элементами, установленными на задней секции буровой головки. Силовые элементы выполнены в виде мотор-редукторов 11 и дифференциальновинтовых механизмов 12 с цилиндром 13. С валом мотор-редуктора 11 жестко связан торсионный вал 14, на другом конце которого по шлицевой посадке установлен винт 15, имеющий на концах резьбу разного шага. На внутренней поверхности цилиндра 13 дифференциального механизма 12 выполнена резьба 16, взаимодействующая с одной резьбой винта 15. Конец входного звена 3 выполнен полым с внутренней резьбой 17 и в нем установлен другой резьбой винт 15, образуя вращательную пару. Звено 3 зафиксировано от проворота посредством шпоночного соединения 18 с цилиндром 13. Поперечная ось вращения шарниров параллельна оси вращательной пары и ориентирована с эксцентриситетом по отношению к ней.
Робот работает следующим образом.
При проходке прямолинейных участков скважины винты 15 всех силовых элементов одинаково ввинчены в полые концы входных звеньев 3 шарнирных механизмов, т. е. все шарнирные механизмы имеют одинаковую длину. При этом система из трех шарнирных механизмов представляет собой жесткую конструкцию, не подвергающуюся "излому" в тот момент, когда по плоскости забоя возникают различные реактивные усилия, вследствие появления на забое твердых включений. Таким образом, искривления скважины не происходит.
При необходимости начала выполнения криволинейного участка скважины изменяют длину одного или двух шарниров путем втягивания или выдвижения входного звена 3 этого шарнира. Для этого включается мотор-редуктор 11, вращение от вала которого передается торсионному валу 14 и связанному с ним винту 15. Вращение винта 15 вызывает его линейное перемещение по резьбе 16 и внутренней резьбе 17 входного звена 3. Так как шаги резьб винта разные, звено 3 получает линейное перемещение, за счет чего изменяется длина этого шарнирного механизма. Так как входные звенья 3 зафиксированы от проворота шпоночным соединением 18, звено не проворачивается, а возникающий крутящий момент воспринимается шпоночным соединением.
Изменение длины одного шарнирного механизма вызывает угловое отклонение звеньев механизмов одно относительно другого во всех шарнирах и жестко связанных с ними передней и задней секций буровой головки. При постоянном воздействии на буровую головку податчика (на чертеже не показан) происходит постепенное и плавное, связанное с величиной продвижения вперед отклонение в заданное направление передней секции и образование криволинейного участка скважины.
После выполнения необходимого поворота и перехода снова на прямолинейную траекторию включается вновь мотор-редуктор 11, но уже в обратном направлении. При этом происходит обратное перемещение звена 3 выдвинутого шарнирного механизма до установки его в первоначальное положение, одинаковое с положением этих звеньев остальных шарнирных механизмов. "Излом" во всех шарнирных узлах аннулируется, передняя 1 и задняя 2 секции устанавливаются соосно и происходит проходка прямолинейного участка скважины.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОХОДЧЕСКИЙ РОБОТ И ТРАНСПОРТИРУЮЩИЙ МЕХАНИЗМ ПРОХОДЧЕСКОГО РОБОТА | 1988 |
|
SU1549153A1 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ СКВАЖИН | 1988 |
|
SU1561578A1 |
| РОБОТ-КРОТ | 1990 |
|
SU1779086A1 |
| РОБОТ-КРОТ | 1989 |
|
SU1716846A1 |
| СПОСОБ ОБРАЗОВАНИЯ КРИВОЛИНЕЙНЫХ СКВАЖИН | 1988 |
|
SU1547394A1 |
| ПРОХОДЧЕСКИЙ РОБОТ | 1988 |
|
SU1621582A1 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ СКВАЖИН | 1989 |
|
SU1614553A1 |
| БУР ВНЕШНЕРОТОРНЫЙ ЗАБОЙНЫЙ | 2016 |
|
RU2645019C1 |
| Способ управления положением плоскостей искривления героторного двигателя при бурении направленных скважин | 2022 |
|
RU2787045C1 |
| НАПРАВЛЯЮЩИЙ БЛОК ДЛЯ НАПРАВЛЕННОГО БУРЕНИЯ СКВАЖИНЫ (ВАРИАНТЫ) И СПОСОБ НАПРАВЛЕННОГО БУРЕНИЯ СКВАЖИНЫ С ИСПОЛЬЗОВАНИЕМ НАПРАВЛЯЮЩЕГО БЛОКА | 2020 |
|
RU2813617C2 |
Изобретение относится к горному делу и может быть использовано при проходке криволинейных скважин. Цель изобретения - расширение области применения за счет обеспечения проходки скважин малого диаметра. Робот содержит буровую головку, состоящую из передней 1 и задней 2 секций. Последние связаны управляемым отклонителем из трех шарнирных механизмов с входными звеньями 3. Каждый шарнирный механизм содержит сферический шарнир с шаром и подпятником. Шары связаны с входными звеньями 3. Поперечные оси вращения шарниров ориентированы параллельно оси вращательной пары с эксцентриситетом по отношению к ней. При необходимости выполнения криволинейного участка входное звено 3 посредством мотор-редуктора 11 выдвигается и отклонитель изменяет направление бурения. Наличие сферических шарниров повышает подвижность отклонителя, что позволяет изготавливать робот малого диаметра. 6 ил.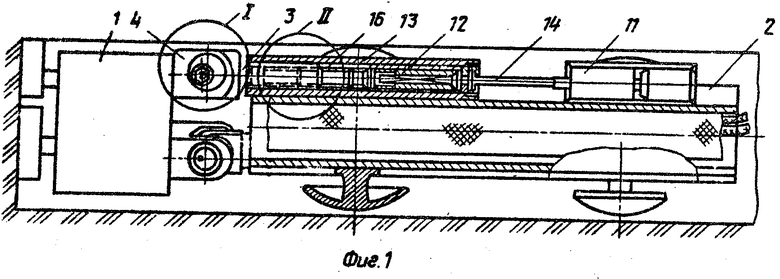
ПРОХОДЧЕСКИЙ РОБОТ, включающий двухсекционную буровую головку с рабочим органом, передняя и задняя секции которой связаны между собой посредством управляемого отклонителя в виде системы шарнирных механизмов, размещенных равномерно по сечению и содержащих вращательную пару с осью вращения, перпендикулярной радиусу рабочего органа, входное звено, установленное на задней секции с возможностью осевого перемещения, и выходное звено, связанное с передней секцией, отличающийся тем, что с целью расширения области применения за счет обеспечения проходки скважин малого диаметра, он снабжен сферическими шарнирами, причем шары связаны с каждым из входных звеньев отклонителя соответственно, а шарнирны установлены с возможностью ориентирования их поперечной оси вращения параллельно оси вращательной пары с эксцентриситетом по отношению к ней.
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ СКВАЖИН | 1988 |
|
SU1561578A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
