Изобретение относится к строительству и горному делу и может быть использовано для проходки горизонтальных и наклонных скважин с прямолинейной и криволинейной траекториями и неоднократными изменениями направления.
Цель изобретения повышение эффективности работы за счет расширения информативных возможностей.
На фиг. 1 представлен робот-крот в общем виде; на фиг.2 фрагмент задней секции буровой головки; на фиг.3 вид по стрелке А на фиг.2; на фиг.4 общий вид датчика пути и узел его крепления к роботу; на фиг.5 вид по стрелке Б на фиг.4; на фиг.6 сечение В-В на фиг.2; на фиг.7 сечение Г-Г на фиг.2; на фиг. 8 сечение Д-Д на фиг.2; на фиг.9 узел I на фиг.4; на фиг.10 вид по стреле Е на фиг.9; на фиг.11 вариант выполнения механизма прижатия ролика.
Робот-крот содержит буровую головку, состоящую из передней 1 и задней 2 секций, связанных между собой посредством управляемого отклонителя, выполненного в виде трех шарнирных механизмов 3, установленных равномерно (через 120о) по поперечному сечению. Каждый шарнирный механизм снабжен приводом 4, связанным с ним через продольные силовые элементы 5 и дифференциально-винтовые механизмы 6, установленные на задней секции 2 буровой головки. На задней секции установлены также опорные элементы: передний 7 и задний 8, закрепленные на фигурном корпусе 9, в котором выполнены продольные пазы под размещение различных элементов устройства. Между силовыми элементами 5 размещены продольно установленные датчики пути 10, закрепленные на корпусе 9 консольно посредством подвесного узла 11. Всего установлено три датчика пути с корпусами, размещенных между опорными элементами 7 и 8.
Каждый датчик пути содержит два измерительных ролика 12, 13, установленных на валах соответственно 14 и 15, и отсчетное приспособление 16. Измерительные ролики 12, 13 и отсчетное приспособление 16 установлены последовательно между собой в корпусе 17 датчика пути и связаны посредством зубчатой передачи 18-28. Установленные на валах 14 и 15 шестерни 18 и 19 взаимодействуют с одной шестерней 20. Она расположена с шестерней 21 на валу 22. Далее вращение передается шестерне 23 на валу 24 и шестерне 25 на валу 26. Последнее в кинематической цепи зубчатое колесо 27 установлено на оси 28 вместе с шестерней 29 отсчетного приспособления 16.
Подвесной узел 11 представляет собой шарнирный параллелограммный механизм, выполненный в виде замкнутой плоской пружины 30. На гранях параллелограмма закреплены ребра жесткости 31, а ребра параллелограмма остаются неармированными. Одной гранью подвесной узел крепится жестко на корпусе 9 задней секции буровой головки, а на противоположной ее грани жестко закреплен Г-образный кронштейн 32, шарнирно связанный с корпусом 17 датчика со стороны оси устройства. Для этого на корпусе датчика жестко закреплена накладка 33, а на накладке 33 и кронштейне 32 жестко закреплена Г-образная плоская пружина 34.
Для прижатия консольно установленных измерительных роликов 12, 13 к стенкам скважины 35 каждый датчик снабжен механизмом прижатия. Он выполнен в виде закрепленного на внешней поверхности корпуса 17 с боковой стороны тандема последовательно установленных электромагнитов 36 с якорями 37. Электромагниты установлены на корпусе продольно. Якорь последнего магнита является тяговым элементом, связан с ушком 38, шарнирно установленным своей головкой на пальце 39, жестко закрепленном поперек кронштейна 32 в средней части его свободного конца. Таким образом, ось вращения образованного шарнира параллельна оси вращения шарнира на кронштейне 32 и обе они перпендикулярны радиальной оси робота-крота. Для компенсации возникающих нежелательных крутящих моментов и погрешности изготовления головка ушка 38 имеет овальное отверстие под установку пальца 39.
На хвостовике ушка 38 установлена винтовая пружина сжатия 40, концами упирающаяся в головку ушка 38 и фланец электромагнита.
Корпусы 17 датчиков пути установлены на корпусе 9 задней секции буровой головки таким образом, чтобы измерительные ролики находились в радиальных плоскостях, а сам корпус был сдвинут в полости продольного паза 41 в корпусе 9. Для этого использованы косые подкладки 42. В свободной полости размещены кабели, необходимые для подвода питания к буровой головке.
На передней секции 1 буровой головки установлен рабочий орган, выполненный в виде двух породоразрушающих инструментов 43, кинематически связанных с приводом вращения, размещенным внутри секции 1 (на чертежах не показан).
Для подачи буровой головки на забой установлен податчик, связанный с задней секцией 2 буровой головки (на чертежах не показан).
Механизм прижатия измерительных роликов к стенкам скважины по второму варианту выполнен в виде пружины сжатия 40, установленной продольно на корпусе 17 датчика 10. Один конец пружины жестко закреплен на корпусе 17, а другой связан с ушком 38. Место установки пружины там же, где установлены электромагниты по первому варианту.
Робот-крот работает следующим образом.
При включении в работу привода вращения рабочего органа и податчика производится бурение скважины 35 породоразрушающими инструментами 43. Измерительные ролики 12, 13 датчиков пути 10 прижимаются к стенкам скважины путем подачи питания на электромагниты 36.
При включении питания на электромагниты 36 их якори 37 притягиваются к катушкам, перемещая связанное с ними ушко 38 с пальцем 39. При этом кронштейн 32, преодолевая силу пружины сжатия 40, будет подтягиваться к корпусу датчика, а угол между этим корпусом и кронштейном будет уменьшаться. Возникающая при этом сила реакции направлена в сторону от корпуса датчика и образует крутящий момент с направлением по часовой стрелке, отжимающий корпус вместе с измерительными роликами к стенкам скважины, т.е. действующий на прижатие измерительных роликов к стенке скважины.
При входе измерительных роликов 12, 13 в контакт со стенками скважины 1 и их принудительном перемещении вместе с роботом они начинают вращаться. Вращение от них передается через шестерни 18, 19 шестерне 20 и от нее через зубчатую передачу 21-28 на зубчатое колесо 27 отсчетного приспособления 16, откуда снимаются показания пройденного пути (на чертежах не показано). Показания отсчетного устройства используются для определения длины и навигационных параметров скважины известными методами.
В процессе бурения происходят небольшие колебания буровой головки вперед-назад. Поскольку подвесной узел 11 датчика выполнен в виде шарнирного параллелограммного механизма, то такие колебания буровой головки частично компенсируются в подвесном узле, в результате чего повышается точность измерения.
При необходимости вывода робота-крота из скважины маневром назад, например для замены инструментов, производится отвод измерительных роликов от стенок скважины. Это необходимо для предупреждения преждевременного износа датчиков и для предотвращения стирания показаний отсчетного устройства. Для отвода роликов отключаются от питания электромагниты 36. Под действием силы пружины сжатия 40 возникает крутящий момент обратного направления, отталкивающий корпус датчика 10 вместе с роликами 12, 13 от стенок скважины, удерживая их в таком состоянии во все время проведения операции вывода-ввода робота. После ввода робота вновь в скважину и доставки буровой головки к забою измерительные ролики вновь прижимаются к стенкам скважины описанным методом и готовы к продолжению работы.
Механизмы прижатия измерительных роликов в виде пружины сжатия используются в случаях, когда нет необходимости обеспечивать особую надежность датчиков. Например, при проходке недлинных скважин, изготавливаемых за время в пределах ресурса одного комплекта инструментов, когда нет необходимости вывода робота для замены инструмента, датчики не подвергаются дополнительному износу. В этих случаях возможно оставление роликов постоянно прижатыми к стенкам. Пружина сжатия 40 создает крутящий момент того же направления, что и включенные электромагниты в первом варианте. На этот крутящий момент действует постоянно, создавая постоянное прижатие измерительных роликов к стенкам.
По сравнению с прототипом предлагаемый проходческий робот является более информативным, так как он снабжен датчиками пути, по показаниям которых можно непрерывно или дискретно определять длину и навигационные параметры скважины в процессе ее проходки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОХОДЧЕСКИЙ РОБОТ И ТРАНСПОРТИРУЮЩИЙ МЕХАНИЗМ ПРОХОДЧЕСКОГО РОБОТА | 1988 |
|
SU1549153A1 |
| РОБОТ-КРОТ | 1990 |
|
SU1779086A1 |
| ПРОХОДЧЕСКИЙ РОБОТ | 1989 |
|
SU1637394A1 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ СКВАЖИН | 1988 |
|
SU1561578A1 |
| РОБОТ БУРОВОЙ УНИВЕРСАЛЬНЫЙ | 2016 |
|
RU2608136C1 |
| ПРОХОДЧЕСКИЙ РОБОТ | 1988 |
|
SU1621582A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТОЛЩИНЫ ПРОКАТА | 1992 |
|
RU2034234C1 |
| Автомат для приварки к торцам труб элементов соединительной арматуры | 1974 |
|
SU640830A1 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ СКВАЖИН | 1989 |
|
SU1614553A1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ УДАРНОГО БУРЕНИЯ СКВАЖИН | 2021 |
|
RU2766989C1 |
Изобретение относится к горному делу и может быть использовано при проходке криволинейных наклонных скважин. Цель изобретения повышение эффективности работы за счет расширения информативных возможностей. Робот-крот содержит буровую головку с рабочим органом, состоящую из передней 1 и задней 2 секций, связанных между собой посредством управляемого отклонителя. Задняя секция 2 содержит фигурный корпус (К) 9, на котором установлены передний 7 и задний 8 опорные элементы. Дополнительно роботкрот снабжен датчиками 10 пути, каждый из которых содержит измерительные ролики (ИР) 12, 13 и отсчетное приспособление; последние установлены последовательно в К 17, который установлен продольно на задней секции 2 буровой головки между опорными элементами 7, 8. Датчик 10 закреплен на К 9 консольно и связан с ним посредством кронштейна который связан с К 17 датчика шарнирно. Механизм прижатия ИР 12 и 13 закреплен на К 17 датчика и содержит тяговый элемент, расположенный продольно вдоль К 17 и связанный шарнирно своим концом с центром кронштейна. При этом оси шарниров параллельны между собой и перпендикулярны радиальной оси роботкрота. Механизм обжатия ролика служит для отжатия последнего при извлечении из скважины. При проходке ИР 12 и 13 обкатываемой стенки скважины, поступает информация о пройденном пути. 3 з. п. ф-лы, 11 ил.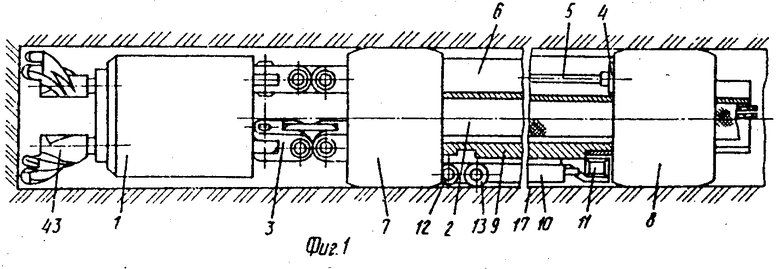
| ПРОХОДЧЕСКИЙ РОБОТ И ТРАНСПОРТИРУЮЩИЙ МЕХАНИЗМ ПРОХОДЧЕСКОГО РОБОТА | 1988 |
|
SU1549153A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
