подключены к блоку 4. К диагоналям М 32 и 33 подключены рабочие полости гидроцилиндров-амортизаторов 2 и 3. Гидрораспределитель 8 подключен к ГЛ 41 и рабочим полостям гидроцилиндра 43 управления. Шток последнего кинематически связан с рычагом 1. Вход датчика 10 подключен к блоку 4. Вход Э 30 Д 31 подкчючен к выходу
первого усилительного блока. Входы Э 6 и 7 подключены к выходам второго и третьего усилительных блоков, По сигналам от датчиков изменяется подача топлива в двигатель и жесткость амортизирующей системы в зависимости от рельефа местности. Это приводит к снижению динамических воздействий на узлы машины. 2 ил.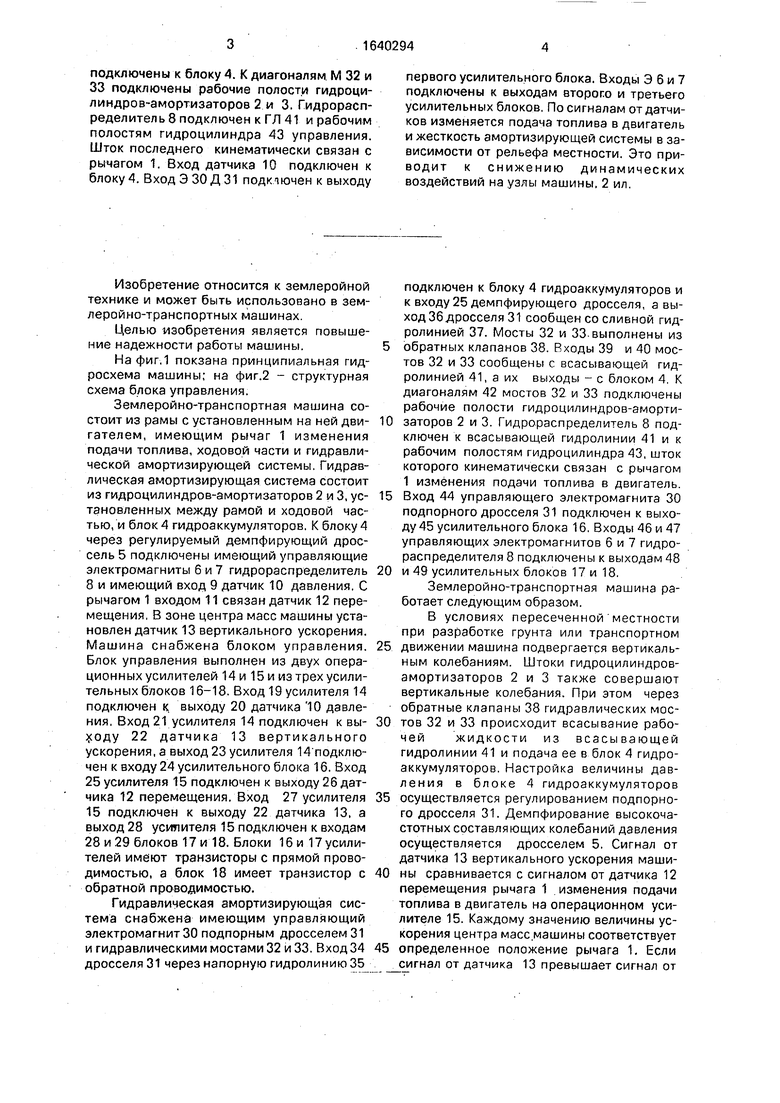
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропневматическое амортизирующее устройство землеройно-транспортной машины | 1986 |
|
SU1460148A1 |
| Транспортное средство с активным прицепом | 1986 |
|
SU1456326A1 |
| Скрепер | 1985 |
|
SU1305264A1 |
| Гибридный электрогидравлический рулевой привод | 2016 |
|
RU2704931C2 |
| ГИДРАВЛИЧЕСКИЙ БЛОК РЕКУПЕРАЦИИ ЭНЕРГИИ | 2018 |
|
RU2688130C1 |
| Устройство для гашения колебаний металлоконструкций роторного экскаватора | 1985 |
|
SU1271941A1 |
| Устройство для автоматической защиты исполнительного органа горной машины от перегрузок | 1982 |
|
SU1044783A1 |
| АМОРТИЗИРУЮЩЕЕ УСТРОЙСТВО РАБОЧЕГО ОБОРУДОВАНИЯ ПОГРУЗОЧНО-ТРАНСПОРТНОЙ МАШИНЫ | 1992 |
|
RU2012742C1 |
| Устройство для автоматической защиты исполнительного органа горной машины от перегрузок | 1983 |
|
SU1149008A2 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ЗАХВАТНО-СРЕЗАЮЩИМ УСТРОЙСТВОМ ВАЛОЧНО-ПАКЕТИРУЮЩЕЙ МАШИНЫ | 2013 |
|
RU2529156C2 |

Изобретение относится к землеройной технике и позволяет повысить надежность в работе машины. На раме машины установлен двигатель с рычагом 1 изменения подачи топлива. Гидравлическая амортизирующая система машины состоит из установленных между рамой и ходовой частью .12 гидроцилиндров-амортизаторов 2 и 3 и блока 4 гидроаккумуляторов. К блоку 4 через регулируемый демпфирующий дроссель 5 подключены гидрораспределитель 8 с управляющими электромагнитами (Э) 6 и 7 и датчик 10 давления. С рычагом 1 входом 11 связан датчик 12 перемещения. В зоне центра масс машины установлен датчик вертикального ускорения. Дополнительно машина снабжена блоком управления, который выполнен из двух операционных усилителей и трех усилительных блоков. Амортизирующая система снабжена подпорным дросселем (Д)31 с управляющим Э 30 и выполненными из обратных клапанов 38 гидравлическими мостами (М) 32 и 33. Вход Д 31 поддключен через напорную гидролинию (ГЛ) 35 к блоку 4. Выход Д 31 сообщен со сливной ГЛ 37. Входы 32 и 33 сообщены с всасывающей ГЛ 41, а выходы со С J/ Os 4 О ГО ю Щиг1
Изобретение относится к землеройной технике и может быть использовано в зем- леройно-транспортных машинах
Целью изобретения является повышение надежности работы машины.
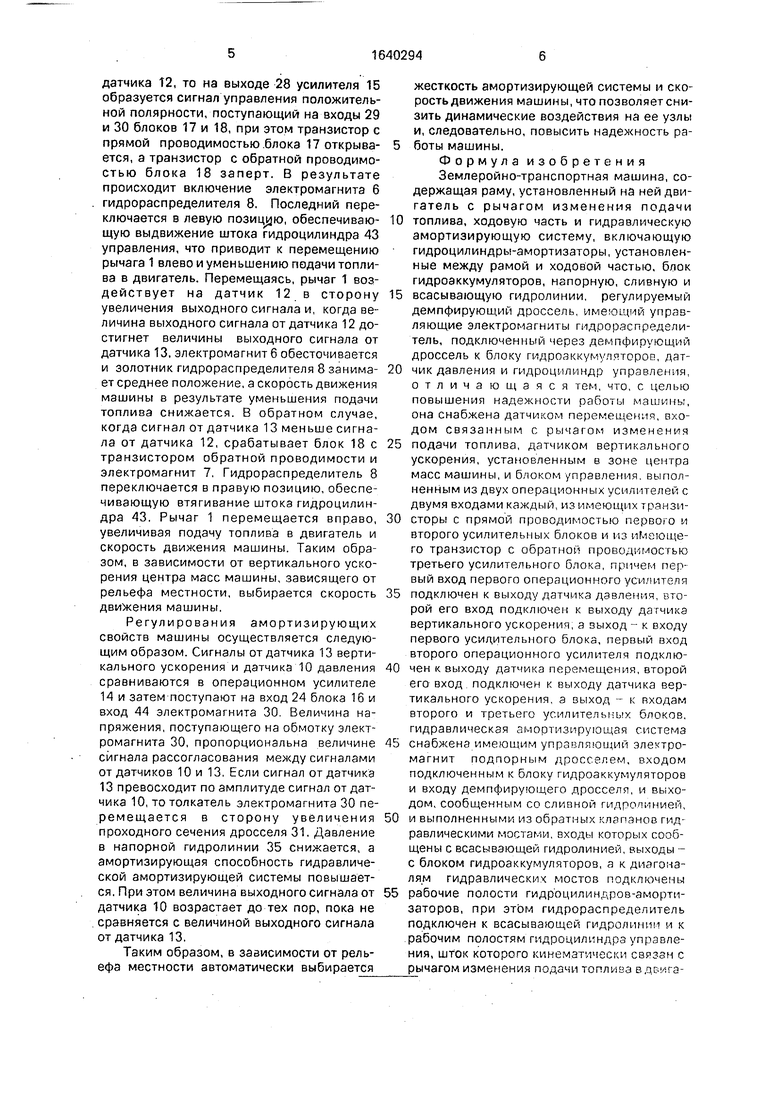
На фиг.1 покзана принципиальная гидросхема машины; на фиг.2 - структурная схема блока управления.
Землеройно-транспортная машина состоит из рамы с установленным на ней дви- гателем, имеющим рычаг 1 изменения подачи топлива, ходовой части и гидравлической амортизирующей системы. Гидравлическая амортизирующая система состоит из гидроцилиндров-амортизаторов 2 и 3, ус- тановленных между рамой и ходовой частью, и блок 4 гидроаккумуляторов. К блоку 4 через регулируемый демпфирующий дроссель 5 подключены имеющий управляющие электромагниты 6 и 7 гидрораспределитель 8 и имеющий вход 9 датчик 10 давления, С рычагом 1 входом 11 связан датчик 12 перемещения, В зоне центра масс машины установлен датчик 13 вертикального ускорения. Машина снабжена блоком управления. Блок управления выполнен из двух операционных усилителей 14 и 15 и из трех усилительных блоков 16-18. Вход 19 усилителя 14 подключен к выходу 20 датчика 10 давления. Вход 21 усилителя 14 подключен к вы- ходу 22 датчика 13 вертикального ускорения, а выход 23 усилителя 14 подключен к входу 24 усилительного блока 16. Вход 25 усилителя 15 подключен к выходу 26 датчика 12 перемещения. Вход 27 усилителя 15 подключен к выходу 22 датчика 13, а выход 28 усилителя 15 подключен к входам 28 и 29 блоков 17 и 18. Блоки 16 и 17 усилителей имеют транзисторы с прямой проводимостью, а блок 18 имеет транзистор с обратной проводимостью.
Гидравлическая амортизирующая система снабжена имеющим управляющий электромагнит 30 подпорным дросселем 31 и гидравлическими мостами 32 и 33. Вход 34 дросселя 31 через напорную гидролинию 35
подключен к блоку 4 гидроаккумуляторов и к входу 25 демпфирующего дросселя, а выход 36 дросселя 31 сообщен со сливной гидролинией 37. Мосты 32 и 33 выполнены из обратных клапанов 38. Входы 39 и 40 мостов 32 и 33 сообщены с всасывающей гидролинией 41, а их выходы - с блоком 4 К диагоналям 42 мостов 32 и 33 подключены рабочие полости гидроцилиндров-амортизаторов 2 и 3. Гидрораспределитель 8 подключен к всасывающей гидролинии 41 и к рабочим полостям гидроцилиндра 43, шток которого кинематически связан с рычагом 1 изменения подачи топлива в двигатель Вход 44 управляющего электромагнита 30 подпорного дросселя 31 подключен к выходу 45 усилительного блока 16. Входы 46 и 47 управляющих электромагнитов 6 и 7 гидрораспределителя 8 подключены к выходам 48 и 49 усилительных блоков 17 и 18.
Землеройно-транспортная машина работает следующим образом.
В условиях пересеченной местности при разработке грунта или транспортном движении машина подвергается вертикальным колебаниям. Штоки гидроцилиндров- амортизаторов 2 и 3 также совершают вертикальные колебания. При этом через обратные клапаны 38 гидравлических мостов 32 и 33 происходит всасывание рабочей жидкости из всасывающей гидролинии 41 и подача ее в блок 4 гидроаккумуляторов. Настройка величины давления в блоке 4 гидроаккумуляторов осуществляется регулированием подпорного дросселя 31. Демпфирование высокочастотных составляющих колебаний давления осуществляется дросселем 5. Сигнал от датчика 13 вертикального ускорения машины сравнивается с сигналом от датчика 12 перемещения рычага 1 изменения подачи топлива в двигатель на операционном усилителе 15. Каждому значению величины ускорения центра масс машины соответствует определенное положение рычага 1. Если сигнал от датчика 13 превышает сигнал от
датчика 12, то на выходе 28 усилителя 15 образуется сигнал управления положительной полярности, поступающий на входы 29 и 30 блоков 17 и 18, при этом транзистор с прямой проводимостью блока 17 открывается, а транзистор с обратной проводимостью блока 18 заперт. В результате происходит включение электромагнита 6 гидрораспределителя 8. Последний переключается в левую позицию, обеспечивающую выдвижение штока гидроцилиндра 43 управления, что приводит к перемещению рычага 1 влево и уменьшению подачи топлива в двигатель. Перемещаясь, рычаг 1 воздействует на датчик 12 в сторону увеличения выходного сигнала и, когда величина выходного сигнала от датчика 12 достигнет величины выходного сигнала от датчика 13, электромагнит 6 обесточивается и золотник гидрораспределителя 8 занимает среднее положение, а скорость движения машины в результате уменьшения подачи топлива снижается. В обратном случае, когда сигнал от датчика 13 меньше сигнала от датчика 12, срабатывает блок 18 с транзистором обратной проводимости и электромагнит 7, Гидрораспределитель 8 переключается в правую позицию, обеспечивающую втягивание штока гидроцилиндра 43. Рычаг 1 перемещается вправо, увеличивая подачу топлива в двигатель и скорость движения машины. Таким образом, в зависимости от вертикального ускорения центра масс машины, зависящего от рельефа местности, выбирается скорость движения машины.
Регулирования амортизирующих свойств машины осуществляется следующим образом. Сигналы отдатчика 13 вертикального ускорения и датчика 10 давления сравниваются в операционном усилителе 14 и затем поступают на вход 24 блока 16 и вход 44 электромагнита 30 Величина напряжения, поступающего на обмотку электромагнита 30, пропорциональна величине сигнала рассогласования между сигналами от датчиков 10 и 13. Если сигнал от датчика 13 превосходит по амплитуде сигнал от датчика 10, то толкатель электромагнита 30 перемещается в сторону увеличения проходного сечения дросселя 31. Давление в напорной гидролинии 35 снижается, а амортизирующая способность гидравлической амортизирующей системы повышается. При этом величина выходного сигнала от датчика 10 возрастает до тех пор, пока не сравняется с величиной выходного сигнала отдатчика 13.
Таким образом, в зависимости от рельефа местности автоматически выбирается
жесткость амортизирующей системы и скорость движения машины, что позволяетсни- зить динамические воздействия на ее узлы и, следовательно, повысить надежность работы машины.
Формула изобретения Землеройно-транспортная машина, содержащая раму, установленный на ней двигатель с рычагом изменения подачи
0 топлива, ходовую часть и гидравлическую амортизирующую систему, включающую гидроцилиндры-амортизаторы, установленные между рамой и ходовой частью, блок гидроаккумуляторов, напорную, сливную и
5 всасывающую гидролинии, регулируемый демпфирующий дроссель, имеющий управляющие электромагниты гидрораспределитель, подключенный через демпфирующий дроссель к блоку гидроаккум л«торор, дат0 чик давления и гидроцилиндр управления, отличающаяся тем, что, с целью повышения надежности оаботы машинь1, она снабжена датчиком перемещения, входом связанным с рычагом изменен к ч
5 подачи топлива, датчиком вертикального ускорения, установленным в зоне центра масс машины, и блоком управления выполненным из двух операционныл усилителей с двумя входами каждый, из имеющих транзи0 сторы с прямой проводимостью nepBOio и второго усилительных блоков и из пМеюще- го транзистор с обратной проводимостью третьего усилительного блока, причем первый вход первого операционного уси итепя
5 подключен к выходу датчика давления, второй его вход подключен к выходу датчика вертикального ускорения, а выход - к входу первого усилительного блока, первый вход второго операционного усилителя подклю0 чен к выходу датчика перемещения, второй его вход подключен к выходу датчика вертикального ускорения а выход - к входам второго и третьего усилителььыу блоков, гидравлическая амоотчзирующая система
5 снабжена имеющим управляющий магнит подпорным дросселем, входом подключенным к блоку гидроаккумуляторов и входу демпфирующего дросселя, и выходом, сообщенным со сливной гидропинией,
0 и выполненными из обратных клапанов гид равлическими мостами входы которых сообщены с всасывающей гидролинией, выходы - с блоком гидроаккумуляторов, а к диагоналям гидравлических мостов подключены
5 рабочие полости гидроцилиндров-амортизаторов, при этом гидрораспределитель подключен к всасывающей гидролинии ч к рабочим полостям гидроцилиндрз управления, шток которого кинематически связан с рычагом изменения подачи топлива вдБ гатель. вход датчика давления подключен к блоку гидроаккумуляторов, вход управляющего электромагнита подпорного дросселя подключен к выходу первого усилительного
Фиг. 2
блока, а входы управляющих электромагнитов гидрораспределителя подключен к выходам второго и третьего усилительных блоков.
| Скрепер | 1983 |
|
SU1086081A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Гидропривод землеройно-транспортной машины | 1987 |
|
SU1465512A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
