1
(21)4488461/03
(22)29о09.88
(46) 07.04.91. иол. If 13
(71)Государственный проектно-кон- структорский и научно-исследователь- ский институт по автоматизации угольной промышленности ГИГЕРОУГЛЕАВТОМАТИ- ЗАЦИЯ
(72)Ю.Н. Камынин, Л.В. Винокуров и С.Г. Лаевский
(53)622.232.72(088о8)
(56)Авторское свидетельство СССР № 825936, кл. Е 21 С 33/00, 1981.
Авторское свидетельство СССР № 1411399, кл. Е 02 F 9/20, 1985.
(54)ДИСТАНЦИОННЫЙ СПОСОБ УЧЕТА РАБОТЫ ГОРНОЙ НАЫШШ В ЗАБОЕ
(57)Изобретение относится к автоматизации технологических циклов в горной промышленности при дистанционном контроле положения и режима работы горных машин. Цель изобретения - повышение точности учета выполненной работы в однородном по составу породы забое. Способ основан на сейсмоакустических колебаний, генери- руемых ковшом (К) экскаватора горной машины Колебания принимаются шестью
сейсмоприемниками 6, размещенными в вершинах двух равносторонних треугольников (РТ) , Ориентированы РТ в гори- зон альной плоскости на поверхности над забоем. Центры РТ находятся на расстоянии L, а основания РТ располагают по одной прямой. Задают прямоугольную систему координат, центр которой совладает с центром одного из РТ. Ось абсцисс координат проходит через центры Т а ось ординат находится в горизонтальной плоскости. Фиксируют моменты времени достижением фронтом сейсмоакустической волны сей- смоприемников 6 и находят интервалы времени t, t и t 5 между зафиксированными моментами времени в каждом РТ. Определяют первичные значения азимутов К, затем их уточняют и по уточненным значениям азимутов Ц и Cf4. определяют пространственные координаты Ко По найденным значениям координат К определяют его местоположение о Затем по последующим найденным координатам определяют траекторию К и находят объем срезанной ковшом стружки и время резания стружки. 10 ил.
(Л
о -и
| название | год | авторы | номер документа |
|---|---|---|---|
| Сейсмоакустический способ контроля бурения глубоких скважин | 1989 |
|
SU1752942A1 |
| Способ определения местонахождения шахтеров, попавших в завал | 1990 |
|
SU1789019A3 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФЕКТОВ В СТРУКТУРЕ ДЕТАЛЕЙ | 2009 |
|
RU2398225C1 |
| СПОСОБ УСТАНОВКИ НА МЕСТНОСТИ СЕЙСМИЧЕСКОГО ЗОНДА | 2015 |
|
RU2607848C2 |
| СПОСОБ ПАССИВНОЙ РАДИОЛОКАЦИИ ДВИЖУЩЕГОСЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2016 |
|
RU2645712C1 |
| Рабочее оборудование экскаватора | 1986 |
|
SU1435718A1 |
| Способ активной обзорной моноимпульсной радиолокации с инверсным синтезированием апертуры антенны | 2018 |
|
RU2682661C1 |
| Способ обзорной активно-пассивной латерационной радиолокации воздушно-космических объектов | 2019 |
|
RU2713498C1 |
| СЕЙСМИЧЕСКОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2004 |
|
RU2273867C1 |
| СПОСОБ ДИАГНОСТИКИ ПОВРЕЖДЕНИЙ КОНСТРУКЦИЙ И ДЕТАЛЕЙ | 2007 |
|
RU2352931C2 |


Изобретение относится к области автоматизации технологических циклов в горной промышленности, а именно к дистанционному контролю положения и режима работы горных машин„
Цель изобретения - повышение точности учета выполненной работы в однородном по составу породы забое.
В изобретении используется теорема, заключающаяся в том, что если некоторая прямая UV, совпадающая первоначально с одной из биссектрис AD равностороннего треугольника ABC, вращается в плоскости треугольника вокруг его центра 0, то проекции сторон треугольника на эту прямую изменяются по закону синуса.
Способ поясняется фиг. 1-10. На фиг. 1 представлен чертеж, поясняющий суть этой теоремы, где ABC - равносторонний треугольник со сторо- ной I; AD - биссектриса угла Л , UV - прямая, первоначально совпадающая1 с биссектрисой AD; (P - угол между AD и
UV, 5j, S, S jj. - проекции сторон треугольника ABC на прямую UV, которые
1равны S, 1-sin (60° + f), 8г
| 1 sinq, 5Ъ 1 sin (60° - q ).
В предложенном техническом решении измеряются не проекции сторон тре-г
угольника, а задержки времени t(, tg tj прихода сейсмоакустического сиг нала в вершины равностороннего трег угольника. Если обозначить буквой v скорость распространения сейсмоакустического сигнала, то в общем случае
t S/v,
где S - путь, пройденный сигналом;
t - время,, прохождения пути. . На фиг „ 2 представлен чертеж, поясняющий переход от закона изменения линейных проекций сторон равностороннего треугольника на прямую, вращающуюся вокруг центра треуголь- ника, к закону изменения задержек времени в зависимости от направления прихода сейсмоакустического сигнала к равностороннему треугольнику ABC, в вершинах которого установлены сейсмоприемники. Здесь t| и t задержки времени прихода сигнала к сей- смоприемникам относительно сейсмопри1емняка, принимающего сигналы пер-вым, a tg - задержка между вре-
-менами прихода сигнала ко второму и
-последнему сейсмоприемникам, 0 - цент равностороннего треугольника, Cf - угол между направлением прихода сигнала и началом ответа, N - направле-
прихода сейсмоакустического сигнаAD - биссектриса, начало отсчета,
л °г
л
зарегистрированное текущее время прихода сейсмосигнала к сей- смоприемникам в вершинах треугольни- $0 ка ABC, Т 1/v - времяо
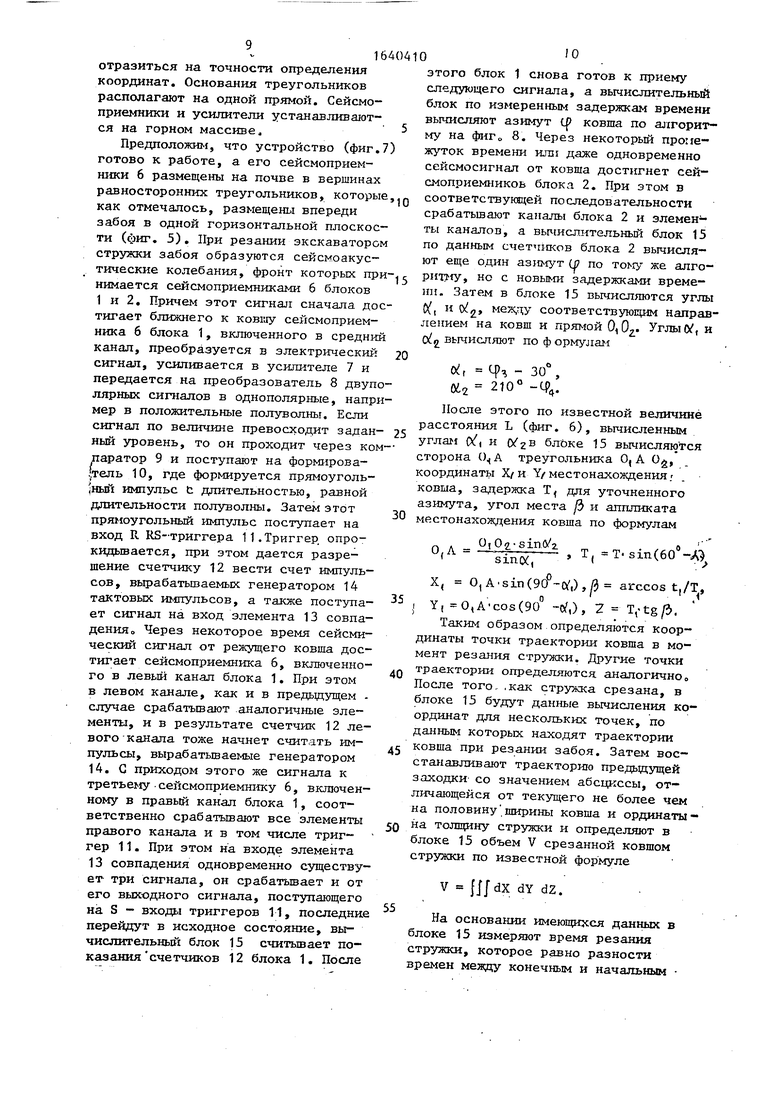
На фиго 3 представлен график, поясняющий изменение задержек и взаимосвязь между азимутами, где - 14, t, t-j - задержки; Cft - первичный азимут; с Чг. вторичный азимут, С| - уточненный азимут.
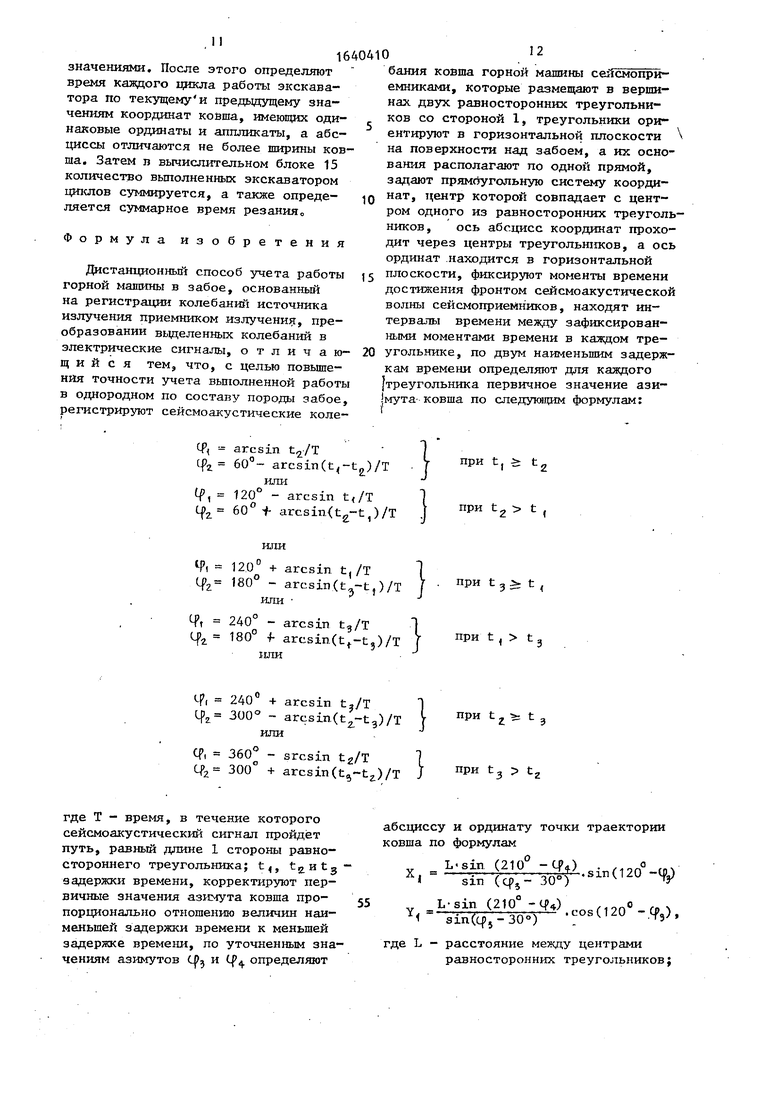
На фиго 4 представлен чертеж, поясняющий нахождение угла места $ ,
0
5 0
0
5
5
0
с
где Р - горизонтальная плоскость; Q - вертикальная плоскость, А, В, С - вершины равностороннего треугольника; IP- уточненный азимут источника сигнала (ковша); t - измеренная задержка времени, в соответствии с фиг. 2, t будет равно t,,; т 4 - задержка времени для уточненного азимута; N - направление прихода сигнала.
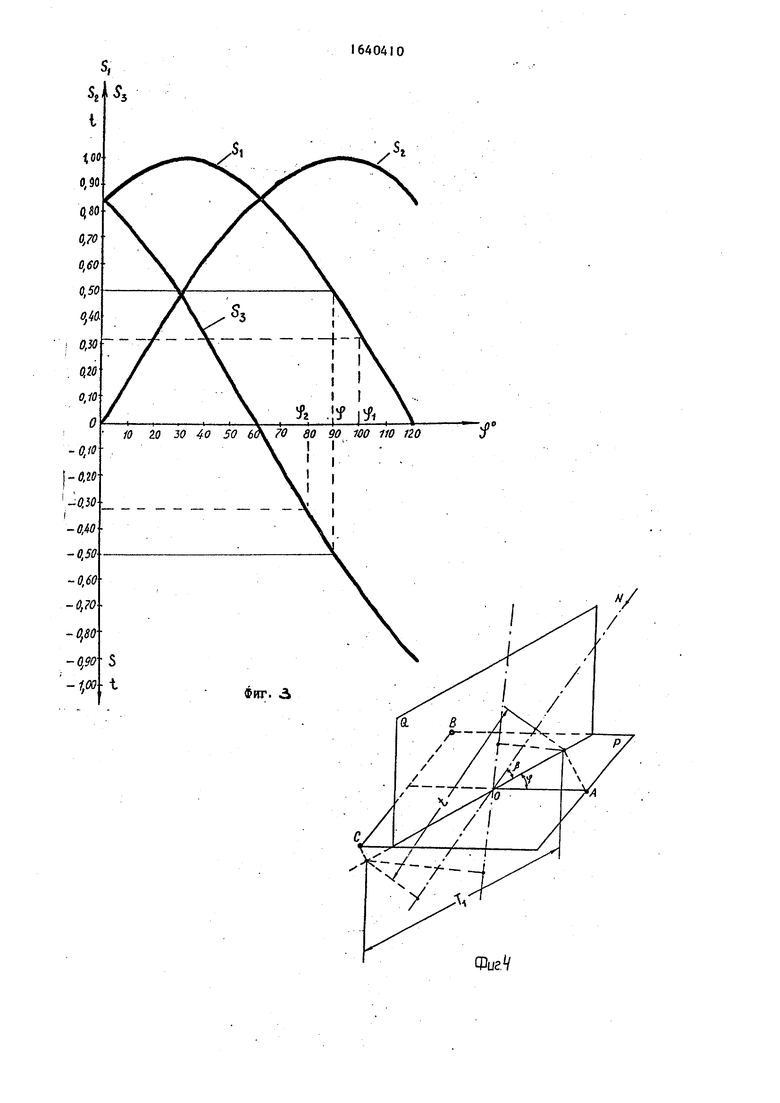
На фиг. 5 представлена схема размещения сейсмоприемников в забое, где А - источник сейсмоакустического сиг- нала; 0„ и центры равносторонних треугольников; ( азимуты; tf, и #2.- углы между азимутальными прямыми и прямой 0« 02,k соединяющей центры равносторонних треугольников; 1 - I расстояние между центрами треугольников
На фиг. 6 представлен треугольник 0 А ОЈ в прямоугольной системе координат X Of Y на плоскости, в которой ось абсцисс совпадает с 0 02, X/ и Y/ - коордшшты (абсцисса и ордината) ис- точника А; оА - углы между азимутальными направлениями на ковш и прямой, соединяющей центры треугольников
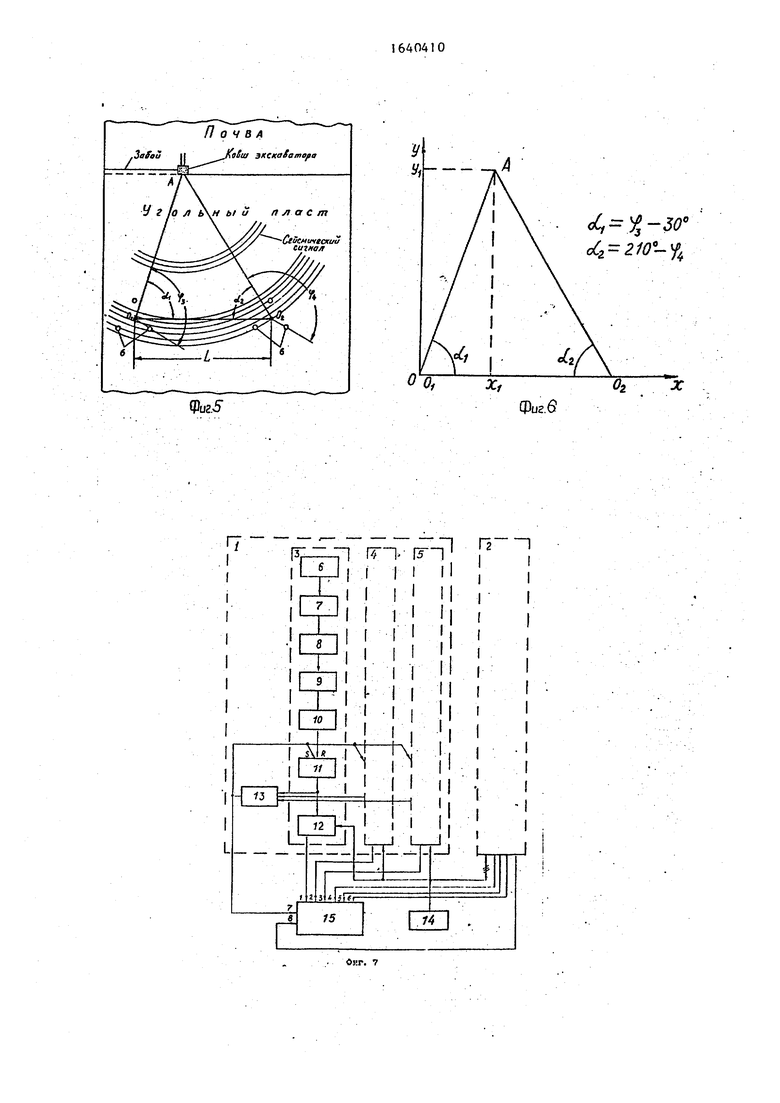
На фиго 7 представлено устройство, реализующее способ, где 1 и 2 - блоки передачи информации и измерения задержек времени поступления сигналов в различные каналы приема соответственно; 3, 4 и 5 - каналы приема сейс- мосигналов и измерения задержек времени; 6 - сейсмоприемники; 7 - усилитель;; 8 - преобразователь; 9 - компаратор; 10 - формирователь; 11 - RS- триггер; 12 - двоичный счетчик, 13 - элемент совпадения; 14 - генератор тактовых импульсов; 15 - вычислительный блОК о
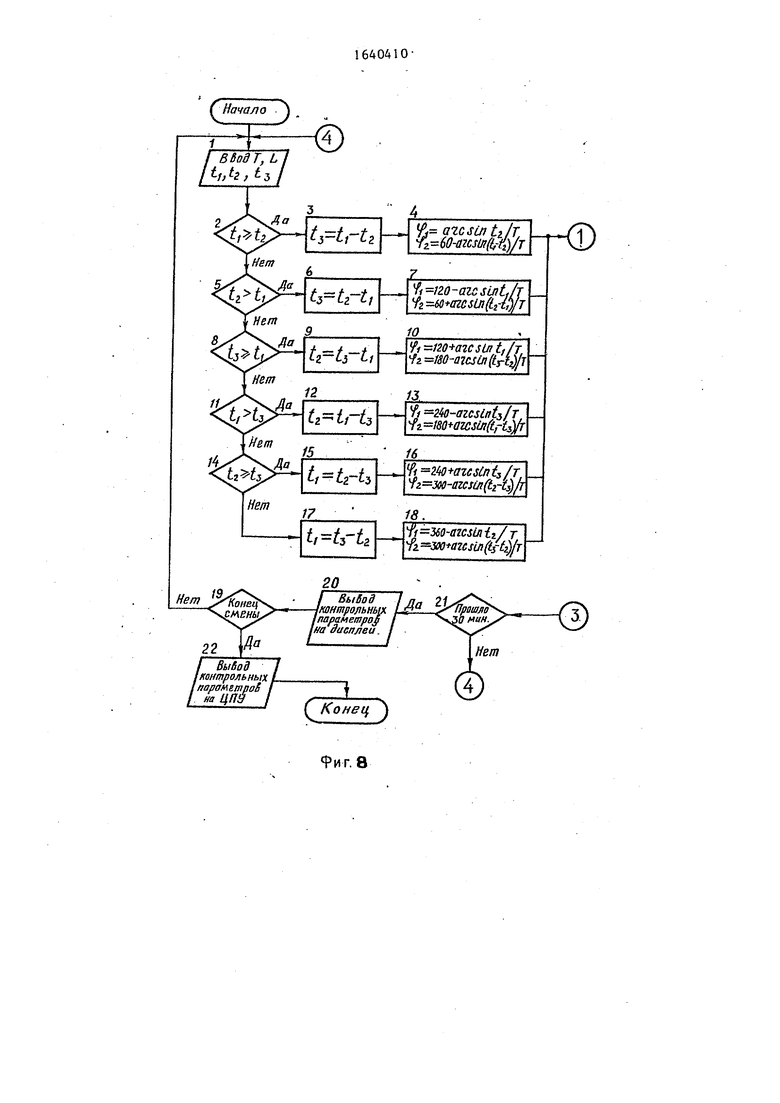
На фиг. 8, 9, 10 представлены алгоритмы работы вычислительного блока .
В соответствии с определениями (фиг. 2) можно записать
t, Й3 1 Т-sin (60° +Cf),
Ч /&з T.eincp,
t3 €г -С, T-sin (60 -Ср).
Если, например, требуется определить азимут ковша с точностью не хуже 0,5 ,,то сначала обращаемся к математической таблице вычисленных синусов и вблизи нулевой точки определяем
р
0,5°-sin 0 0,0087-0,0000 0,0087,
а затем по экспериментальной вычисляем частоту f в кГц
12
И.
f -4
Of, + )/2.
Если учесть, что сейсмосигнал к равностороннему треугольнику может приходить в плоскости с любого направления, то по аналогии с вращающейся прямой формулы для задержек.времени будут
t, i sin(60°-(p), sinCf,
A. «
tl i sin (60°-Cf).
Если задержки времени каким-либо етодом измерены, то согласно фиг.2 гол Ср определяется однозначно
(f -60+arcsin Cf arcsin s
(f 60 - arcs in - , I
35
40
45
де Т время, в течение которого сейсмоакустический сигнал -пройдет путь, равный длине стороны равностороннего треугольника 1, которая определяется по экспериментальной формуле
1/100 v/f,
де v - скорость распространения сей- 55 смоакустических импульсов в массиве горных пород, который выбран для установки сейсмо- приемников
50
1640410
ле
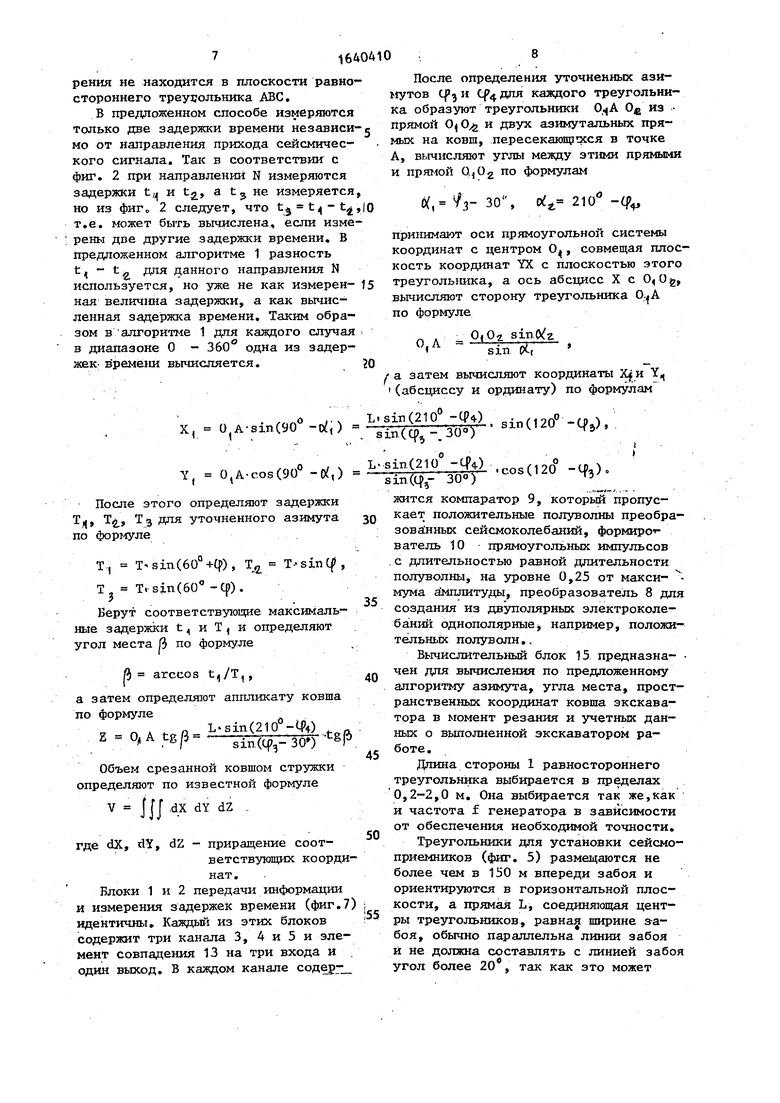
Азимут ковиа экскаватора для кажт дог о равностороннего треугольника определяется по алгоритму 1
ПрИ t j 5: t 2
при
tz
при t з
t.
при t , t.
при t3 tz
0
5
0
Ј - частота следования электрических имлульсов, служащих для измерения задержек времени.
Частоту электрических импульсов f определяют исходя из точности, которую требуется получить при вычислении азимутальных значений ковша экскаватора в момент резания
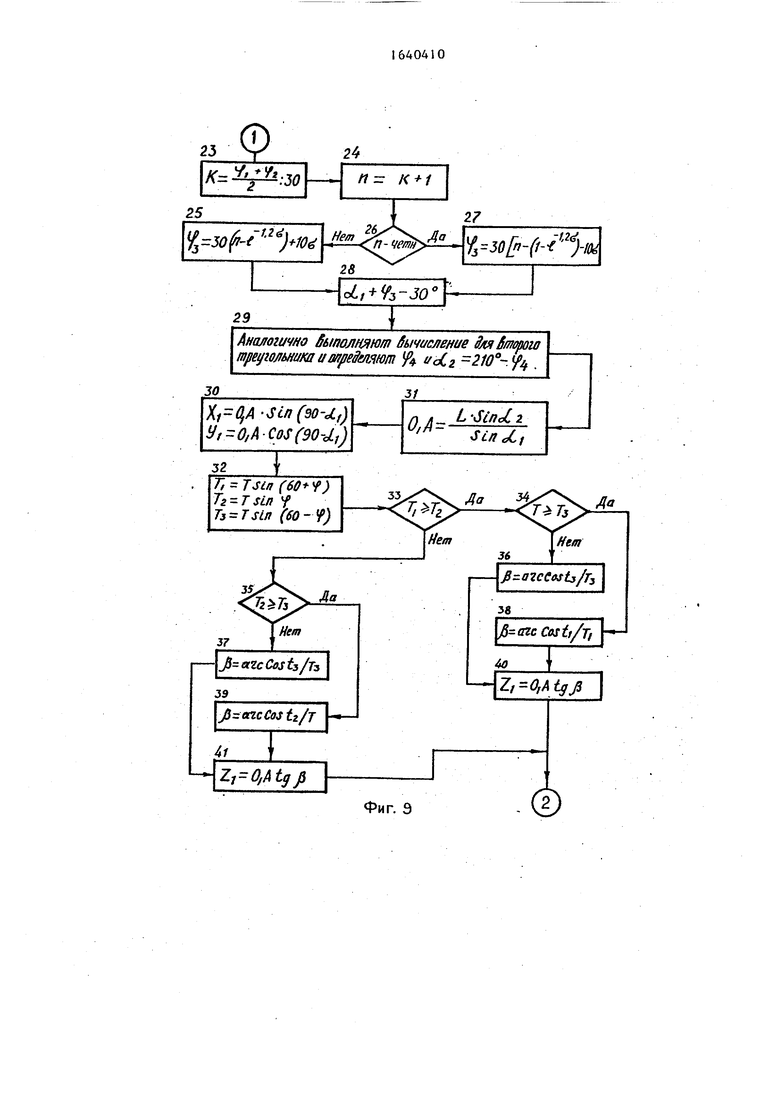
В последнем случае ер определяется с некоторой ошибкой. Для устранения этой ошибки принимают центр равностороннего треугольника за центр окружности, разбивают эту окружность, начиная от биссектрисы начала отсчета, на 12 секторов по 30° каждый, определяют грубо порядковый номер п сектора, в котором находится найденный угол Ср по формуле п К-Н , где К - целая часть частного от
ления
представлен нечетным числом, то азимутальный угол определяется по формулег/ГCf 30 п -(1 - е ) + ,
а если п - представлен четным числом по формуле
ц 30 fn - (1 - е (2(Г) - IDS ,
где
наименьшая задержка
меньшая задержка Различные значения Ср, и , оказываются в том случае, если угол места /э не равен нулю, т.е. точка резания (режущая кромка ковша) в момент иэмерения не находится в плоскости равностороннего треусольника ABC.
В предложенном способе измеряются только две задержки времени независи-с мо от направления прихода сейсмического сигнала. Так в соответствии с фиг. 2 при направлении N измеряются задержки t и t, a t не измеряется, но из фиг „ 2 следует, что tj t,(t,|0 т.е. может быть вычислена, если измерены две другие задержки времени. В предложенном алгоритме 1 разность
t t для данного направления N
используется, но уже не как измерен- 15 нал величина задержки, а как вычисленная задержка времени. Таким образом в алгоритме 1 для каждого случая в диапазоне 0 - 360° одна из задержек- в ремени вычисляется.
X, 0 A-sin(90° -tfi)
Y( 0{A-cos (90° -tft)
После этого определяют задержки Trt тЈ T3 Д™1 уточненного азимута по формуле
Т, T.sin(60°+Cp), Тд T sinq, Т Т. sin(60° ).
Берут соответствующие максимальные задержки t, и Т , и определяют угол места ft по формуле
ft arccos t,,/T,,
а затем определяют аппликату ковша по формуле
„ п . Q L sin(210e-tPO .
z q, A tgp. .tgp
Объем срезанной ковшом стружки определяют по известной формуле
V JJJ dX dY dZ
где dX, dY, dZ - приращение соответствующих координат.
Блоки 1 и 2 передачи информации и измерения задержек времени (фиг.7) идентичны Каждый из этих блоков содержит три канала 3, 4 и 5 и элемент совпадения 13 на три входа и один выход. В каждом канале содер-
После определения уточненных азимутов и Ч74 Д кажД°г° треугольника образуют треугольники Ол из прямой OjO,Ј и двух азимутальных прямых на ковш, пересекаюпцосся в точке А, вычисляют углы между этими прямыми и прямой QjOg по формулам
К,- /3- 30, 0 210° -QV
принимают оси прямоугольной системы координат с центром 0, совмещая плоскость координат YX с плоскостью этого треугольника, а ось абсцисс X с , вычисляют сторону треугольника О.А по формуле
О
- .
Л sin pt,
5 0
/ а затем вычисляют координаты Y4 (абсциссу и ординату) по формулам
«.sinOZO -CW,
cos(120 -tf3)
в in (210° -ЦЧ) sin(tf5- 30°)
жится компаратор 9, который пропус- кает положительные полуволны преобра- зова нньк сейсмоколебаний, формиро - ватель 10 прямоугольных импульсов с длительностью равной длительности полуволны, на уровне 0,25 от макси- х- мума амплитуды, преобразователь 8 для создания из двуполярных электроколе- баншг однополярные, например, положительных полуволн..
Вычислительный блок 15 предназна- чен для вычисления по предложенному алгоритму азимута, угла места, пространственных координат ковша экскаватора в момент резания и учетных данных о выполненной экскаватором работе.
Длина стороны 1 равностороннего треугольника выбирается в пределах 0,2-2,0 м. Она выбирается так же,как и частота f генератора в зависимости от обеспечения необходимой точности.
Треугольники для установки сейсмо- приемников (фиг. 5) размещаются не более чем в 150 м впереди забоя и ориентируются в горизонтальной плоскости, а прямая L, соединяющая центры треугольников, равная ширине з-а- боя, обычно параллельна линии забоя и не должна составлять с линией забоя угол более 20 , так как это может
16404
отразиться на точности определения координат. Основания треугольников располагают на одной прямой. Сейсмо- приемники и усилители устанавливаются на горном массиве.
Предположим, что устройство (фиг.7) готово к работе, а его сейсмоприем- ники 6 размещены на почве в вершинах равносторонних треугольников, которые,.- как отмечалось, размещены впереди забоя в одной горизонтальной плоскости (фиг. 5). При резании экскаватором стружки забоя образуются сексмоакустические колебания, фронт которых при-..,- , но с новыми задержками време-
нимается сейсмоприемниками 6 блоков 1 и 2. Причем этот сигнал сначала достигает ближнего к ковшу сейсмолрием- ника 6 блока 1, включенного в средний канал, преобразуется в электрический 20 сигнал, усиливается в усилителе 7 и передается на преобразователь 8 двупо- лярных сигналов в однополярные, например в положительные полуволны. Если
сигнал по величине превосходит задан- 25 /
углам (Xi и (У 7 в блоке 15 вычисляются ныи уровень, то он проходит через ком-- J
ни. Затем в блоке 15 вычисляются углы С(, и метсду соответствующим направ лением на ковш и прямой 0,0,. Углы(У( и вычисляют по ф ормулам
X, 44 - зо°,
Oi2 210° -%.
После этого по известной величине расстояния L (фиг. 6), вычисленным
сторона О., А треугольника О, А 0, координаты X/ и Y/местонахождения - . ковыа, задержка Т для уточненного азимута, угол места 3 и аппликата 30 местонахождения ковша по формулам
паратор 9 и поступают на формирова- тель 10, где формируется прямоуголь- 1ный импульс с длительностью, равной длительности полуволны. Затем этот прямоугольный импульс поступает на вход R RS-триггера 11.Триггер, опрокидывается, при этом дается разрешение счетчику 12 вести счет импульсов, вырабатываемых генератором 14 тактовых импульсов, а также поступает сигнал на вход элемента 13 совпадения о Через некоторое время сейсмический сигнал от режущего ковша достигает сейсмоприемника 6, включенного в левый канал блока 1. При этом в левом канале, как и в предыдущем - случае срабатывают аналогичные элементы, и в результате счетчик 12 левого канала тоже начнет считать импульсы, вырабатываемые генератором 14. С приходом этого же сигнала к третьему сейсмоприемнику 6, включенному в правый канал блока 1, соответственно срабатывают все элементы правого канала и в том числе триггер 11. При этом на входе элемента 13 совпадения одновременно существует- три сигнала, он срабатывает и от его выходного сигнала, поступающего на S - входы триггеров 11, последние перейдут в исходное состояние, вычислительный блок 15 считывает показания счетчиков 12 блока 1. После
/0
этого блок 1 снова готов к приему следующего сигнала, а вычислительный блок по измеренным задержкам времени вычисляют азимут tp ковша по алгоритму на фиго 8. Через некоторый пропе- жуток времени или даже одновременно сейсмосигнал от ковша достигнет сей- смоприемникоь блока 2. При этом в соответствующей последовательности срабатывают каналы блока 2 и элементы каналов, а вычислительный блок 15 по данным счетчиков блока 2 вычисляют еще один азимут (0 по тому же алгоpin iy, но с новыми задержками време-
/
ни. Затем в блоке 15 вычисляются углы С(, и метсду соответствующим направлением на ковш и прямой 0,0,. Углы(У( и вычисляют по ф ормулам
X, 44 - зо°,
Oi2 210° -%.
После этого по известной величине расстояния L (фиг. 6), вычисленным
углам (Xi и (У 7 в блоке 15 вычисляютс J
сторона О., А треугольника О, А 0, координаты X/ и Y/местонахождения - . ковыа, задержка Т для уточненного азимута, угол места 3 и аппликата местонахождения ковша по формулам
л л QI О г-sin (У 2. ° Л sinK,
Т. Т- sin(60 -Л)
Х( О, A sinOO0-,), arccos t,/T, , Y, 0,A cos(90° -of,), 2 T, tg/5,
Таким образом определяются координаты точки траектории ковша в момент резания стружки. Другие точки траектории определяются аналогично После того ,как стружка срезана, в блоке 15 будут данные вычисления координат для нескольких точек, по данным которых находят траектории ковша при резании забоя. Затем восстанавливают траекторию предыдущей заходки со значением абсциссы, отличающейся от текущего не более чем на половину ширины ковша и ординаты - на толщину стружки и определяют в блоке 15 объем V срезанной ковшом стружки по известной формуле
V fjj dX dY dZ.
На основании имеющихся данных в блоке 15 измеряют время резания стружки, которое равно разности времен между конечным и начальным
значениями. После этого определяют время каждого цикла работы экскаватора по текущему и предыдущему значениям координат ковша, имеющих одинаковые ординаты и аппликаты, а абсциссы отличаются не более ширины ковша. Затем в вычислительном блоке 15 количество выполненных экскаватором циклов суммируется, а также определяется суммарное время резания
Формула изобретения
Дистанционный способ учета работы горной машины в забое, основанный на регистрации колебаний источника излучения приемником излучения, преобразовании выделенных колебаний в электрические сигналы, отличаю- щ и и с я тем, что, с целью повышения точности учета выполненной работы в однородном по составу породы забое, регистрируют сейсмоакустические коле
arcsin
60°- arcsin()/T
или
120° - arcsin 60°+ arcsin t2-t,)/T
Ipi 120° + arcsin t,/T 1 tfe 180° - arcsin(tyt,)/T )
или
Iff 240° - arcsin t,/T
If4 180° f arcsin(tt-t,)/T
или
240° + arcsin t,/T 300° - arcsin(tz-t3)/T или
360 - srcsin t2/T 300° + arcsin (t5-tz)/T
где Т - время, в течение которого сейсмоакустический сигнал пройдет путь, равный длине 1 стороны равностороннего треугольника; t«, задержки времени, корректируют первичные значения азимута ковша пропорционально отношению величин наименьшей задержки времени к меньшей задержке времени, по уточненным значениям азимутов ср и Ср определяют
0
бания ковша горной машины сеисмопри- емниками, которые размещают в вершинах двух равносторонних треугольников со стороной 1, треугольники ориентируют в горизонтальной плоскости на поверхности над забоем, а их основания располагают по одной прямой, задают прямоугольную систему координат, центр которой совпадает с центром одного из равносторонних треугольников, ось абсцисс координат проходит через центры треугольников, а ось ординат находится в горизонтальной 5 плоскости, фиксируют моменты времени достижения фронтом сейсмоакустической волны сейсмоприемников, находят интервалы времени между зафиксированными моментами времени в каждом треугольнике, по двум наименьшим задержкам времени определяют для каждого треугольника первичное значение ази- мута ковша по следующим формулам:
при t, t2
при tz t (
при t g t f
}
при t , t 3
} }
при tz t э
при t3 tz
абсциссу и ординату точки траектории ковша по формулам
х, - ь ±)-;й)- °°-%
,1 : ч -ч« ™ -ъгде L - расстояние между центрами
равносторонних треугольников;
определяют максимальную задержку Т t для уточненного азимута, определяют угол места ковша б по формуле
arccos t /T, находят аппликату ковша по формуле
„ L sin(210°-q 4) L sin(lp3- 30°)
ФИГ. I
и по найденным значениям координаты, местоположения ковша определяют его местоположение, по последующим найденным координатам ковша определяют траекторию ковша и находят объем срезанной ковшом стружки породы и время резания стружки.
А
I
X
5
Фиг 2
ПОЧВА
.Safou || J(aCia эхскаХатора
Фиг5
Л
Ј, %-зо°
оС2 210 -%
Фиг в
С Начало Л .
/ ВыВод 1
{контрольных L
j параметров Г
(Конец Л
Фиг. 8
23
24
25
29
L
Аналогично дыполняют бычисление Злябторого треугольника и мреЗеляют % i/aCz 210°-%
зо
Xf qA-Siff(90-ctf) y O/A-CoSCdO-jLj)
32
I
T, Tsia (60+ Y)
T2-T sin У
T3 Tsin (60-Y)
J aZcCost3/T3
39
JS arc Costz/J
T.
г
()-Ш
L
j/
0,A
L -St/iaC 2 Jiffcitt
ft-azceestj/T3 |
зв
Costi/j,
to Т ,AtyJ3 |
Фиг. Э
42
Определение траектории 8Јишния ко$ша по координатам тачек этой траектории при значении абсциссы X
43
L
ВосстаноВмние траектории дЈиженця кз/ша
предыдущей шоЯки яри значении а/ециссы X,
лежащей Sпределах (х+0,5и/к)Хг(х 0,5шк).
Вычисление объема V срезанной ко/гшом стрижки
У Ш dx dy dz
Суммирование 0/ьемоВ срезанных, ковшам экскабатора стружвк
Измерение Времена резания стружек Тгг С f где Tj и -йремя начала и конца резанцр.
fyMMa/was бремя резания
гг
Определение /ремени цик/га tц работы экскаватора.
Счет количестНа це/к/юИpafn/пы экскаНалюра
Гц
1640410
-
2
L
