Изобретение относится к пассивной радиолокации и может быть использовано в двух- и многопозиционных измерительных комплексах для определения пространственных координат местоположения источников радиоизлучения (ИРИ).
В последнее время уделяется повышенное внимание методам пассивной радиолокации, реализуемым на базе минимально возможного количества измерительных позиций комплекса. Известны ([1], с. 494-497) классические методы пассивной радиолокации ИРИ, реализуемые на базе двухпозиционного измерительного комплекса (ДИК). К ним относятся триангуляционный метод (ТМ) и угломерно-разностно-дальномерный метод (УРДМ). В соответствии с ТМ ([1], с. 494-495; [2]) координаты местоположения ИРИ определяются как точка (без учета ошибок пеленгования) пересечения пеленгов ИРИ, измеренных с разнесенных в пространстве позиций (пеленгаторов) ДИК. Основными недостатками ТМ, ограничивающими его применение, являются низкая точность определения координат местоположения ИРИ при его нахождении в окрестности линии базы и (или) при больших дальностях до ИРИ. УРДМ ([1], с. 497) основан на измерении угловых координат ИРИ и определении разности расстояний от него до позиций ДИК. Основным недостатком УРДМ являются ошибки, вызванные неодновременностью измерений.
Известны также альтернативные методы пассивной локации стационарных и подвижных ИРИ, оперирующие угловыми и энергетическими [3-10] или только энергетическими измерениями [11]. При этом реализация данных методов возможна на базе однопозиционных, двухпозиционных и многопозиционных систем пассивной локации.
К недостаткам данных методов можно отнести следующее:
- методы [3, 4] имеют жесткие ограничения на точность пеленгования и ориентированы, в первую очередь, на узконаправленные и, как следствие, дорогостоящие антенные системы;
- для реализации метода [5] требуется более двух измерительных позиций, распределенных в пространстве строго определенным образом;
- в методах [7, 9, 10] движение ИРИ либо не учитывается, либо применяется модель прямолинейного равномерного движения ИРИ с частично известными параметрами (например, известна величина скорости), а также определяются лишь плоскостные координаты местоположения ИРИ по двум радиоконтактам [7, 10];
- в методах [3-11] не учитывается кривизна Земли, что не позволяет осуществлять координатометрию ИРИ, находящегося на большом удалении, и не учитывается влияние подстилающей поверхности на результаты энергетических измерений.
Известно [12, с. 408, с. 410], что для обнаружения и сопровождения ИРИ на малых углах места необходимо увеличивать высоту размещения приемных антенн относительно поверхности Земли. В этом случае должны учитываться интерференционные явления, обусловленные появлением прямой и отраженной волны на раскрывах данных антенн ([12], с. 403). Однако указанные выше методы [3-11] ориентированы на простейший случай свободного распространения электромагнитных волн от ИРИ до приемных антенн и, как следствие, применимы только для идеализированных (гладких) диаграмм направленности антенн (ДНА). При этом реальные практические задачи могут быть связаны с пассивной локацией низколетящих ИРИ на малых дальностях или высоколетящих (над поверхностью Земли) ИРИ на больших дальностях, что соответствует малым углам места. В первом случае необходимо использовать модель плоской Земли, а во втором - учитывать сферичность Земли ([13], с. 475-476). При этом известно ([1], с. 266), что для малых углов места влияние Земли необходимо учитывать даже для диапазона сантиметровых и миллиметровых длин волн.
Наиболее близким к предлагаемому изобретению (прототипом) является способ определения наклонной дальности до прямолинейно и равномерно движущегося ИРИ на базе однопозиционной измерительной системы [14]. Для реализации указанного способа используются два угловых и два энергетических измерения. При этом рассматриваются ИРИ с частично известными параметрами движения, т.е., когда заданы тип траектории, величины скорости и ускорения. Кроме того, полагается, что временной интервал между двумя соседними моментами измерений настолько мал, что условия проведения измерений угловых и энергетических параметров ИРИ для этих моментов времени одинаковы.
Способ [14] неработоспособен, когда ИРИ находится на большом удалении от однопозиционной измерительной системы и при этом движется на очень малой скорости, так, что угол между двумя соседними пеленгами на ИРИ близок к нулю, а значения мощности принимаемого сигнала на входе системы при первом и втором измерении примерно одинаковы.
Существенными недостатками прототипа [14] является возможность определения только плоскостных координат ИРИ, а также необходимость априорного знания скорости прямолинейного равномерного (плоскостного) движения ИРИ и необходимость использования двух радиоконтактов с ИРИ. Кроме того, прототип не позволяет учитывать влияние подстилающей поверхности (Земли) на результаты энергетических измерений и работоспособен лишь в случае высокоточных измерений угловых координат ИРИ и мощности его излучения.
Задачей изобретения является разработка способа определения пространственных координат местоположения ИРИ, движущегося при малых углах места, по результатам единичных угловых и энергетических измерений, осуществляемых на базе ДИК. При этом метод должен учитывать кривизну Земли для ИРИ, движущихся на больших дальностях, и влияние подстилающей поверхности на результаты энергетических измерений, а также устранить другие недостатки прототипа [14], отмеченные выше.
Для решения задачи в предлагаемом способе используют ДИК. На двух приемных позициях комплекса одновременно измеряют мощности излучения ИРИ и на одной из них в этот же момент времени дополнительно измеряют угловые координаты ИРИ. За счет совместной обработки угловых и энергетических измерений определяют координаты местоположения ИРИ в пространстве с учетом влияния отраженного от подстилающей поверхности излучения ИРИ на результаты энергетических измерений. Для ИРИ, находящегося на большой дальности от ДИК, учитывают также кривизну Земли. Значения пространственных координат местоположения ИРИ определяют следующим образом:
вычисляют коэффициент
 ,
,
где p1i=p1(ti) и р2i=р2(ti) - мощности излучения ИРИ, фиксируемые одновременно в момент времени ti∈[0,7] на приемных позициях М1 и М2 ДИК соответственно;
вычисляют дальность до приемной позиции М2
 ,
,
где α2i=α2(ti) - значение азимута ИРИ, измеряемое в момент времени ti∈[0,T] на приемной позиции М2 ДИК, с которой связано начало декартовой базовой системы координат (БСК);
b - известная величина базы ДИК;
вычисляют координаты
хi=R2icosα2i,
yi=R2isinα2i,
zi=R2isinβ2i+h2,
где β2i=β2(ti) - значение угла места ИРИ, измеряемое в БСК в момент времени ti∈[0,T] на приемной позиции М2 ДИК,
h2 - аппликата антенны позиции М2 в БСК;
вычисляют параметр
 ,
,
где Re - радиус Земли; проверяют выполнение условия
 ,
,
если условие выполняется, то вычисляют уточненное значение  аппликаты zi
аппликаты zi
 .
.
Вследствие того, что учитывается кривизна Земли для ИРИ, движущихся на больших дальностях, и влияние подстилающей поверхности на результаты энергетических измерений, повышается точность определения пространственных координат местоположения ИРИ.
Для дальнейшего повышения точности определения пространственных координат местоположения ИРИ используют многопозиционный измерительный комплекс путем построения в нем ДИК, получаемых неповторяющимися парами приемных позиций комплекса. Получают значения пространственных координат местоположения ИРИ на основе каждого такого ДИК. За счет этого формируют избыточность оценок пространственных координат местоположения ИРИ, совместно обрабатывают эти оценки и получают более точные значения пространственных координат местоположения ИРИ.
Предлагаемый способ поясняется чертежом, на котором изображена схема определения пространственных координат местоположения ИРИ на базе ДИК.
В БСК, совмещенной с пассивным ДИК, движется некоторый ИРИ (на фигуре положение ИРИ в момент времени ti∈[0,T] обозначено буквой Ci=C(ti) и наблюдается на временном интервале [0,T] с приемных пунктов Мn (n∈{1,2}) под малыми углами места. Вследствие этого для любой поляризации и длины волны излучения выполняется критерий гладкости участка земной поверхности (4πυψλ-1<0.1, где υ - стандартное отклонение неровностей поверхности от средней высоты поверхности; ψ - угол скольжения электромагнитной волны в радианах относительно горизонтали (в нашем случае ψ≈β); λ - длина волны излучения), существенного при отражении (критерий Релея). В точках расположения антенн приемных позиций возникает интерференция прямой и отраженной компонент волны ([1], с. 252; [12], с. 403; [13], с. 466-470). Существенным при отражении будем считать участок в пределах первой зоны Френеля ([12], с. 409), ограниченный значением радиуса  , где hn - аппликата антенны позиции Мn. Движение ИРИ в БСК на интервале [0,Т] описывается полиномиальной, в общем случае, криволинейной моделью, широко используемой на практике, особенно в условиях маневра ИРИ или отсутствия информации о действующих на него силах ([15], с. 5-11).
, где hn - аппликата антенны позиции Мn. Движение ИРИ в БСК на интервале [0,Т] описывается полиномиальной, в общем случае, криволинейной моделью, широко используемой на практике, особенно в условиях маневра ИРИ или отсутствия информации о действующих на него силах ([15], с. 5-11).
В момент времени ti (где ti∈[0,Т],  - произвольная временная сетка) на приемных позициях М1 и М2 фиксируются энергетические уровни (мощности) излучения p1i=p1(ti) и p2i=p2(ti) соответственно. При этом полагается, что ДНА приемных позиций известны. Кроме того, на второй позиции М2 измеряются азимут α2i=α2(ti) и угол места β2i=β2(ti) наблюдаемого ИРИ (будем считать в дальнейшем, что начало БСК связано с поверхностью Земли и совпадает с абсциссой и ординатой позиции М2). При этом выполняются условия ([12], с. 404; [13], с. 475): hn, zi<<Rni и hn, zi>>λ (где zi=z(ti) - аппликата положения ИРИ в БСК; Rni - наклонная дальность от позиции Мn до ИРИ), обеспечивающие адекватность предположения о том, что на существенный при отражении участок поверхности падает однородная локально плоская электромагнитная волна, и применимо понятие коэффициентов отражения от однородной плоской поверхности. Атмосфера считается однородной непоглощающей средой с относительной диэлектрической проницаемостью ε=1 и удельной проводимостью среды σ=0; поверхность Земли - гладкой и однородной ([13], с. 466).
- произвольная временная сетка) на приемных позициях М1 и М2 фиксируются энергетические уровни (мощности) излучения p1i=p1(ti) и p2i=p2(ti) соответственно. При этом полагается, что ДНА приемных позиций известны. Кроме того, на второй позиции М2 измеряются азимут α2i=α2(ti) и угол места β2i=β2(ti) наблюдаемого ИРИ (будем считать в дальнейшем, что начало БСК связано с поверхностью Земли и совпадает с абсциссой и ординатой позиции М2). При этом выполняются условия ([12], с. 404; [13], с. 475): hn, zi<<Rni и hn, zi>>λ (где zi=z(ti) - аппликата положения ИРИ в БСК; Rni - наклонная дальность от позиции Мn до ИРИ), обеспечивающие адекватность предположения о том, что на существенный при отражении участок поверхности падает однородная локально плоская электромагнитная волна, и применимо понятие коэффициентов отражения от однородной плоской поверхности. Атмосфера считается однородной непоглощающей средой с относительной диэлектрической проницаемостью ε=1 и удельной проводимостью среды σ=0; поверхность Земли - гладкой и однородной ([13], с. 466).
Из четырехугольника CiOiKM1 (см. фигуру) для момента времени ti∈[0,T] следует

где R1i=R1(ti) и r1i=r1(ti) - наклонная и горизонтальная дальности от ИРИ до позиции М1; h1 - аппликата антенны позиции М1 в БСК.
Здесь и далее появление нижнего индекса i означает, что речь идет о моменте времени ti.
Из треугольника OiKS можно найти

где r2i=r2(ti) - горизонтальная дальность от ИРИ до позиции М2; b=x1.
Из треугольника СiLM2, при выполнении условий h1≈h2 или h1, h2<<zi для второго слагаемого в формуле (1) следует

Подставляя (2) и (3) в (1), получим выражение

Из треугольника CiLM2 следует соотношение  . Учитывая, что
. Учитывая, что  и
и  (для нашей геометрии задачи), можно записать
(для нашей геометрии задачи), можно записать

С учетом (5) и допуская, что  , выражение (4) примет вид
, выражение (4) примет вид

Известно ([6], с. 176), что сигнал на выходе поднятой над Землей антенны представляет собой аддитивную смесь, по меньшей мере, трех компонент: прямого сигнала, отраженного от Земли сигнала и компоненты сигнала, обусловленной диффузным рассеянием. Ввиду этого мощность излучения на выходе антенны позиции Mn, n∈{1,2} может быть представлена выражением ([6], с. 179)

где Р - мощность излучения; Gn и  - коэффициенты усиления (КУ) антенн позиции Мn и ИРИ соответственно; χ - коэффициент потерь; Фni=Фn(ti) - интерференционный множитель (множитель влияния Земли). Для малых углов места (когда выполняется условие sin βni≈βni) и в случае слабонаправленных антенн справедлива формула ([12], с. 410; [13], с. 474)
- коэффициенты усиления (КУ) антенн позиции Мn и ИРИ соответственно; χ - коэффициент потерь; Фni=Фn(ti) - интерференционный множитель (множитель влияния Земли). Для малых углов места (когда выполняется условие sin βni≈βni) и в случае слабонаправленных антенн справедлива формула ([12], с. 410; [13], с. 474)

Далее, вводя относительные энергетические коэффициенты
и допуская выполнение условий h1≈h2 и G1≈G2, с учетом (5), (7), (8) получим

В выражении (9) зависимость параметра q2i от второй степени дальности объясняется тем, что поле, создаваемое ИРИ и распространяющееся в горизонтальном направлении к позициям M1 и М2, компенсируется за счет интерференционных явлений полем зеркального ИРИ, у которого ток в антенне почти равен по амплитуде току в антенне истинного ИРИ, а по фазе - противоположен ([12], с. 405; [13], с. 474).
С учетом (9) перепишем выражение (6) в виде

Преобразуя (10), получим приведенное квадратное уравнение относительно R2i вида
 ,
,
где μi=-2bcosα2i(1-q2i)-1 и ηi=b2(1-q2i)-1). Решая уравнение, находим нужный корень

Второй корень уравнения не соответствует геометрии задачи и может не учитываться.
По аналогии с (11) можно записать общее выражение для наклонной дальности

где Rni - дальность от ИРИ до позиции Мn; αni - азимут ИРИ, измеренный с позиции Мn.
Выражение (12) позволяет определять наклонную дальность от ИРИ до позиции Мn в момент времени ti, по известным значениям базы (b) между позициями М1 и М2, азимута (αni), полученного с позиции Мn, и относительного энергетического коэффициента (qni), характеризующего уровень излучения, регистрируемого на указанных приемных позициях.
По найденной дальности Rnj, известным пеленгам αni, βni и в предположении rni≈Rni, можно оценить пространственные координаты ИРИ в БСК следующим образом:
Для второй модели радиотрассы, учитывающей сферичность Земли (когда  ) ([12], с. 411; [13], с. 475), высота ИРИ над поверхностью Земли вычисляется по формуле ([1], с. 267; [12], с. 412)
) ([12], с. 411; [13], с. 475), высота ИРИ над поверхностью Земли вычисляется по формуле ([1], с. 267; [12], с. 412)

где  - расстояние прямой видимости между пунктом Мn и положением ИРИ в БСК.
- расстояние прямой видимости между пунктом Мn и положением ИРИ в БСК.
Формулы (1)-(14) составляют математическую основу предлагаемого способа координатометрии ИРИ по единичным (соответствующим одному моменту времени) пеленгационно-энергетическим измерениям, осуществляемым на базе ДИК.
Для осуществления изобретения и достижения заявленного технического результата выполняют следующие действия:
1 в момент времени ti∈[0,T] одновременно на двух приемных позициях М1 и М2 ДИК фиксируются энергетические уровни (мощности) излучения p1i=p1(ti) и p2i=p2(ti) соответственно и в тот же момент времени ti, на второй позиции измеряют азимут α2i=α2(ti) и угол места β2i=β2(ti) ИРИ. Для этого используют один пассивный пеленгатор и два измерителя мощности принимаемого излучении, снабженных антеннами со всенаправленными ДНА.
2 Определяют пространственные координаты xi, yi, zi ИРИ в БСК для момента времени ti. Для этого:
2.1 вычисляют коэффициент  ;
;
2.2 вычисляют дальность  ;
;
2.3 вычисляют координаты
 ;
;
 ;
;
 ;
;
3 Уточняют значение координаты zi. Для этого:
3.1 вычисляют параметр
 ;
;
3.2 проверяют выполнение условия
 ;
;
если условие выполняется, то вычисляют уточненное значение  аппликаты zi
аппликаты zi

Предложенный способ позволяет на базе ДИК по двум энергетическим измерениям и одному пеленгу оценивать пространственные координаты местоположения ИРИ без привлечения априорной информации о частично известных параметрах движения (например, о величине скорости для модели равномерного прямолинейного движения ИРИ) и учитывать влияние Земли на результаты измерений.
Изобретение можно применять и в многопозиционных измерительных комплексах для повышения точности решения задачи пассивной радиолокации за счет формирования информационной избыточности ([1], с. 501-506; [16-18]) на различных измерительных структурах, получаемых неповторяющимися парами приемных позиций комплекса. Например, в многопозиционном комплексе, состоящем из трех позиций, выделяют три независимых ДИК, на которых получают три разные по точности оценки пространственных координат местоположения ИРИ. Затем их совместно обрабатывают и получают более точную оценку пространственных координат местоположения ИРИ. При этом реализация изобретения в пассивных измерительных комплексах не требует существенных финансово-экономических затрат, поскольку изобретение ориентировано на совершенствование программной составляющей измерительных комплексов, осуществляющей обработку входных измерительных данных (угловых координат и мощности принимаемого излучения ИРИ).
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Теоретические основы радиолокации / под ред. Я. Ширмана. М.: Сов. радио. 1970. 561 с.
2. Булычев Ю.Г., Головской В.А. Обработка измерений угломерных систем в условиях априорной неопределенности в регуляризованной постановке // Радиотехника и электроника. 2010. Т. 55. №1. С. 71-77.
3. Уфаев В.А., Афанасьев В.И., Разиньков С.П. Оценка координат источника радиоизлучения на основе измерений амплитуды электромагнитного поля // Радиотехника. 2003. №10. С. 71-73.
4. Евдокимов Ю.Ф., Медведев В.П. Амплитудная система определения местоположения источников излучения с использованием метода наименьших квадратов и исследование ее точности // Телекоммуникации. 2003. №11. С. 34-37.
5. Сытенький В.Д. Пассивная локация на основе амплитудных измерений // Известия ВУЗов России. Радиоэлектроника. 2011. №1. С. 69-75.
6. Мельников Ю.П., Попов С.В. Радиотехническая разведка. Методы оценки эффективности местоопределения источников излучения. М.: Радиотехника, 2008. 432 с.
7. Булычев Ю.Г., Мозоль А.А., Вернигора В.Н. Оперативный метод определения дальности при пеленговании цели с частично известными параметрами // Изв. вузов. Авиационная техника. 2010. №1. С. 24-26.
8. Булычев В.Ю., Булычев Ю.Г., Ивакина С.С. Пассивная локация на основе угловых и мощностных измерений системы пеленгаторов // Изв. РАН. Теория и системы управления. 2014. №1. С. 65-73.
9. Булычев Ю.Г., Булычев В.Ю., Ивакина С.С., Насенков И.Г. Амплитудно-угломерный метод нестационарной пассивной локации с учетом частично известных параметров движения цели // Автометрия, 2015. 51, №3. С. 70-79.
10. Булычев Ю.Г., Вернигора В.Н., Мозоль А.А. Пеленгационно-мощностной метод определения дальности до цели по двум измерениям автономной угломерной системы // Изв. вузов. Радиоэлектроника. 2009. Т. 52. №11. С. 51-60.
11. Булычев Ю.Г., Ивакина С.С., Мозоль А.А., Насенков И.Г. Анализ модификации энергетического метода пассивной дальнометрии // Автометрия, 2016. 52, №1. С. 37-44.
12. Коростелев А.А., Клюев Н.Ф., Мельник Ю.А. и др. Теоретические основы радиолокации / под ред. В.Е. Дулевича. 2-е изд. М.: Сов. радио, 1978. 608 с.
13. Петров Б.М. Электродинамика и распространение радиоволн: учебник для вузов. М.: Радио и связь, 2000. 559 с.
14. Патент РФ №2406098, МПК G01S 3/00, опубл. 10.12.2010. Способ определения наклонной дальности до движущейся цели по минимальному числу пеленгов.
15. Жданюк Б.Ф. Основы статистической обработки траекторных измерений. М.: Сов. радио, 1978. 384 с.
16. Рекомендации по межгосударственной стандартизации / РМГ 64-2003 / Обеспечение эффективности измерений при управлении технологическими процессами / Методы и способы повышения точности измерений. - Москва. ИПК Издательство стандартов. 2004.
17. Обеспечение эффективности измерений при управлении технологическими процессами / Методы и способы повышения точности измерений / МИ 2301-2000. - Москва. ВНИИМС. 2000.
18. Брюханов В.А. Методы повышения точности измерений в промышленности. - М.: Изд-во стандартов, 1991 - 108 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНЫЙ СПОСОБ ПАССИВНОЙ РАДИОЛОКАЦИИ | 2015 |
|
RU2593149C1 |
| ВРЕМЕННОЙ СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО СКАНИРУЮЩЕГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ БЕЗ ИЗМЕРЕНИЯ ПЕЛЕНГА | 2018 |
|
RU2704029C1 |
| ВРЕМЕННОЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ СКАНИРУЮЩЕГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2020 |
|
RU2742581C1 |
| ОДНОПОЗИЦИОННЫЙ МУЛЬТИПЛИКАТИВНЫЙ РАЗНОСТНО-ОТНОСИТЕЛЬНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2016 |
|
RU2643780C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2019 |
|
RU2734108C1 |
| Однопозиционный мультипликативный разностно-относительный способ определения координат местоположения источников радиоизлучения | 2016 |
|
RU2668566C2 |
| ТРИАНГУЛЯЦИОННО-ГИПЕРБОЛИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ РАДИОИЗЛУЧАЮЩИХ ВОЗДУШНЫХ ОБЪЕКТОВ В ПРОСТРАНСТВЕ | 2012 |
|
RU2503969C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ И ПАССИВНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, ИСПОЛЬЗУЕМАЯ ПРИ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2004 |
|
RU2275649C2 |
| Способ одноэтапного адаптивного определения координат источников радиоизлучений | 2021 |
|
RU2768011C1 |
| Способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором | 2020 |
|
RU2758832C1 |

Изобретение относится к пассивной радиолокации и может быть использовано в двух- и многопозиционных измерительных комплексах для определения пространственных координат местоположения источников радиоизлучения (ИРИ). Достигаемый технический результат - определение пространственных координат местоположения ИРИ, наблюдаемого под малыми углами места, с высокой точностью. Указанный результат достигается за счет того, что способ осуществляют на базе пассивного двухпозиционного измерительного комплекса., при этом на двух приемных позициях комплекса измеряют мощности излучения ИРИ и на одной из них - угловые координаты ИРИ для одного момента времени. Далее проводят совместную обработку угловых и энергетических измерений и получают пространственные координаты местоположения ИРИ с учетом влияния подстилающей поверхности на результаты энергетических измерений, причем, если ИРИ находится на большой дальности, то учитывают также и кривизну Земли. 1 з.п. ф-лы, 1 ил.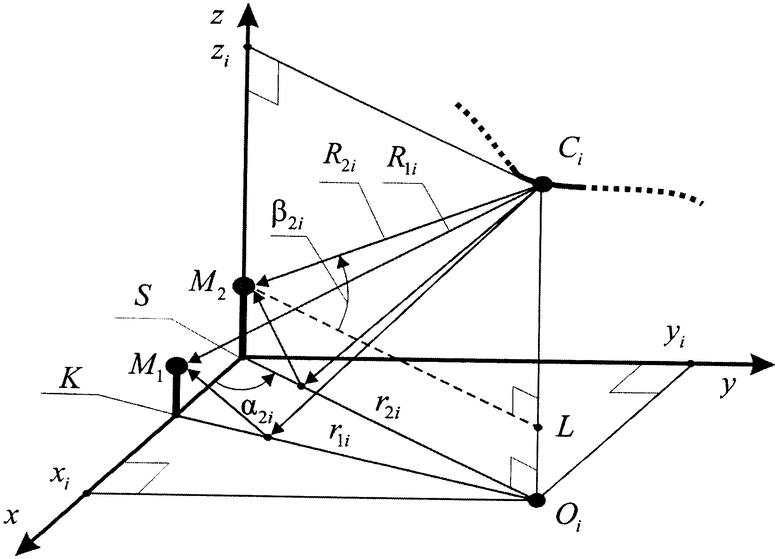
1. Способ пассивной радиолокации движущегося источника радиоизлучения (ИРИ), включающий измерение мощности излучения и угловых координат ИРИ, совместную обработку этих измерений, отличающийся тем, что в качестве измерительного комплекса используют двухпозиционный измерительный комплекс (ДИК), измерение мощности излучения ИРИ осуществляют на двух приемных позициях комплекса, а угловых координат ИРИ - на одной из них одновременно, определяют координаты местоположения ИРИ в пространстве с учетом влияния отраженного от подстилающей поверхности излучения ИРИ на результаты энергетических измерений, причем для ИРИ, находящегося на большой дальности от ДИК, учитывают также кривизну Земли, при этом значения пространственных координат местоположения ИРИ определяют следующим образом:
вычисляют коэффициент
где p1i=p1(ti) и p2i=p2(ti) - мощности излучения ИРИ,
фиксируемые одновременно в момент времени ti∈[0,T] на приемных позициях М1 и М2 ДИК соответственно;
вычисляют дальность до приемной позиции М2

где α2i=α2(ti) - значение азимута ИРИ, измеряемое в момент времени ti∈[0,T] на приемной позиции М2 ДИК, с которой связано начало декартовой базовой системы координат (БСК);
b - известная величина базы ДИК;
вычисляют координаты
xi=R2icosα2i,
yi=R2isinα2i,
zi=R2isinβ2i+h2,
где β2i=β2(ti) - значение угла места ИРИ, измеряемое в БСК в момент времени ti∈[0,T] на приемной позиции М2 ДИК,
h2 - аппликата антенны позиции М2 в БСК;
вычисляют параметр

где Re - радиус Земли;
проверяют выполнение условия
если условие выполняется, то вычисляют уточненное значение  аппликаты zi
аппликаты zi

2. Способ по п. 1, отличающийся тем, что пространственные координаты местоположения ИРИ определяют с помощью многопозиционного измерительного комплекса путем построения в нем ДИК, получаемых неповторяющимися парами приемных позиций комплекса, получения значений пространственных координат местоположения ИРИ на основе каждого такого ДИК, формирования за счет этого избыточности оценок координат местоположения ИРИ и последующей совместной обработки этих оценок.
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ДО ДВИЖУЩЕЙСЯ ЦЕЛИ ПО МИНИМАЛЬНОМУ ЧИСЛУ ПЕЛЕНГОВ | 2009 |
|
RU2406098C1 |
| АДАПТИВНЫЙ СПОСОБ ПАССИВНОЙ РАДИОЛОКАЦИИ | 2015 |
|
RU2593149C1 |
| ТЕРКА ДЛЯ СВЕКЛЫ | 1933 |
|
SU38509A1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ И ПАССИВНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, ИСПОЛЬЗУЕМАЯ ПРИ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2004 |
|
RU2275649C2 |
| US 6577272 B1, 10.06.2003 | |||
| US 6275189 B1, 14.08.2014 | |||
| WO 2004011955 A2, 05.02.2004. | |||

