Изобретение относится к экстремальным системам регулирования с активным поисковым сигналом и может быть использовано в различных областях науки и техники, где необходимо автоматически поддерживать экстремальное значение регулируемого параметра.
Целью изобретения является повышение точности и надежности системы экстремального регулирования за счет исключения поисковых колебаний в экстремуме.
На чертеже изображена схема система экстремального регулирования.
Система экстремального регулирования содержит объект 1 регулирования, сумматор 2, амплитудный ограничитель 3, линейное корректирующее звено 4, фазосдвигающее устройство 5, синхронный детектор 6, исполни- ельный элемент 7.
Соединенные в замкнутый контур линейное звено, амплитудный ограничитель, сумматор и объект регулирования представляют собой автогенератор с изменяющейся амплитудой колебаний. Передаточная функция разомкнутой линеаризованной цепи такого автогенератора
WCn1) /j-v
Wtp; (I2- + 2ЈТр + 1)2 (1)
где К - произведение статических коэффициентов линейного звена и ограничителя в его линейной части; KffC - коэффициент передачи объекта по первой гармонике, величина и знак которого зависит от положения рабочей точки на экстремальной характеристике; Т, - постоянная времени и коэффициент демпфирования колебательного звена; р - оператор Лапласа.
оэ о о со
При замыкании такого звена единичной обратной связью получают автогенератор, амплитуда автоколебания которого зависит от коэффициента К„с, частота - от постоянной времени Т, а скорость затухания колебаний - от коэффициента демпфирования f .Знак коэффициента Кос зависит от знака отклонения от экстремума. В связи с этим контур автогенератора может замыкаться как положительной, так и отрицательной обратной связью. Годограф амплитудно-фазовой характеристики W(p) охватывает как точку (+1, j 0), так и точку (-1, j 0), что гарантирует возникновение автоколебаний как при положительной, так и при отрицательной обратной связи.При приближении к экстремуму Кас (по модулю) уменьшается, годограф стягивается внутрь единичной окружности и автоколебания срываются, Кос при этом стремится к нулю - обратная связь разрывается.
Система работает следующим образом.
При отклонении объекта 1 от экст- 1ремума его статический коэффициент передачи по первой гармонике К0 сотли чен от нуля и равен производной выходного сигнала по регулирующему воздействию dy/dx в точке отклонения. Как было указано выше, в замкнутом контуре: объект 1 - линейное звено 4 - амплитудный ограничитель 3 - сумматор 2 возникают автоколебания, частота которых определяется постоянной времент Т линейного звена 4, а амплитуда - коэффициентом Кас, т.е. величиной отклонения от экстремума и, следовательно, величиной производной dy/dx. Скорость нарастания амплитуды колебаний до установивше- гося значения и спадания по мере приближения к экстремуму определяется коэффициентом демпфирования линейного звена 4. Входной и выходной сигналы перемножают на синхронном детекторе 6. Если необходимо учесть инерционность объекта, то фазу входного сигнала регулируют с помощью фазосдвигающего устройства 5. Выходной сигнал синхронного детектора подают на исполнительный элемент 7, который вырабатывает регулирующее воздействие. Объект приближается к экстремуму, его коэффициент передачи уменьшается (уменьшается отклонение от экстремума, уменьшается
dy/dx) - падгет амплитуда автоколебания. По достижении экстремума,автоколебания срываются, так как Кос dy/dx 0. Обратная связь по первой гармонике разрывается (на других частотах автоколебания не возникают, так как линейное звено 4 является узкополосным фильтром). Движение системы прекращается. Система находится я покое до тех пор, пока не возникнут условия возбуждения автоколебания, т.е. не появятся отклонения от экстремума, что позволяет повысить ее точность и надежность.
Формула изобретения
Система экстремального регулирования, содержащая объект регулирова- ния, синхронный детектор, исполнительный элемент, сумматор, фазосдви- гающий элемент и амплитудный ограничитель, отличающаяся тем, что, с целью повышения ее точности и надежности за счет исключения поисковых колебаний в экстремуме, в нее введено линейное корректирующее звено, вход которого соединен с выходом объекта, а выход - с входами ампли- тудного ограничителя и фазосдвигающего элемента, выход амплитудного ограничителя соединен с первым входом сумматора, подключенного выходом к входу объекта регулирования,первый и второй входы синхронного детектора соединены соответственно с выходом объекта и выходом фазосдвигающего элемента, а выход - с входом исполнительного элемента, соединенного выходом с вторым входом сумматора.
U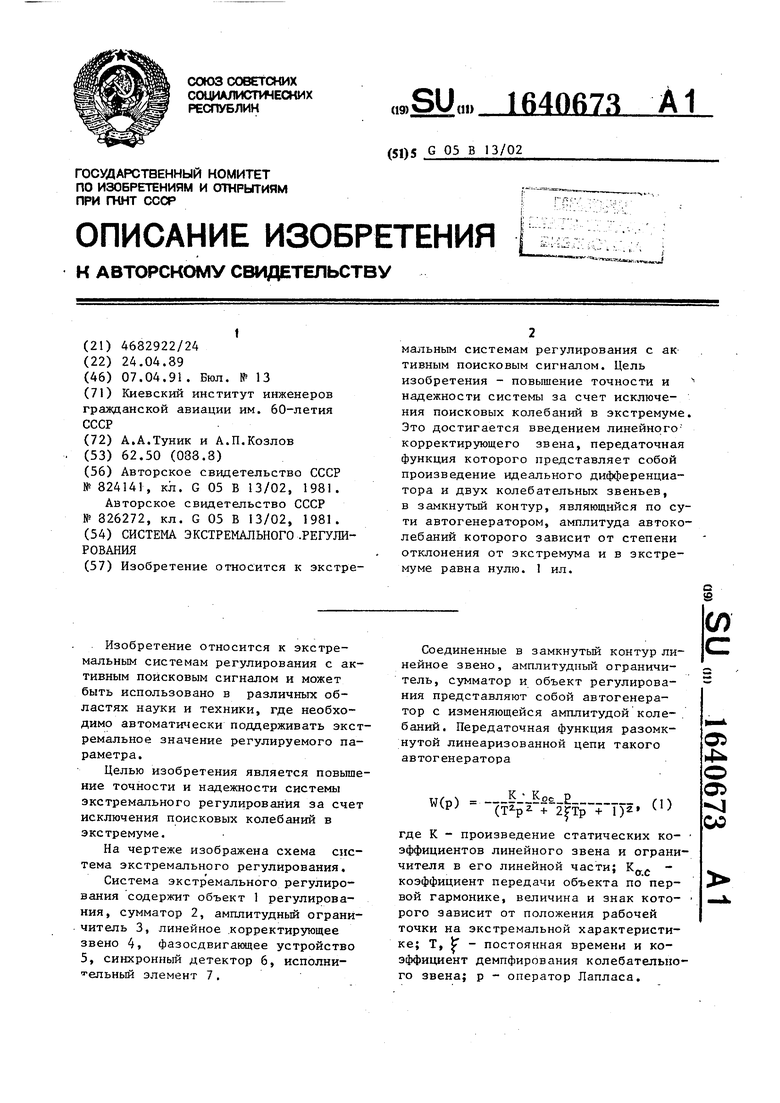

| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальная система экстремального регулирования | 1981 |
|
SU1187147A1 |
| Система экстремального регулирования | 1974 |
|
SU661504A1 |
| Многоканальная система экстремального регулирования | 1974 |
|
SU528544A1 |
| Многоканальная система экстремальногоРЕгулиРОВАНия | 1979 |
|
SU824141A1 |
| Система управления | 1981 |
|
SU996995A1 |
| Двухмерная электромеханическая экстремальная система | 1975 |
|
SU565284A1 |
| Устройство для управления экстремальным объектом с неустойчивой линейной частью | 1980 |
|
SU901995A1 |
| Система экстремального регулирования | 1980 |
|
SU888069A1 |
| УСТРОЙСТВО НЕПРЕРЫВНОГО ЭКСТРЕМАЛЬНОГО РЕГУЛИРОВАНИЯ | 1972 |
|
SU343361A1 |
| Система управления инерционным экстремальным объектом | 1986 |
|
SU1456930A1 |

Изобретение относится к экстремальным системам регулирования с ак тивным поисковым сигналом. Цель изобретения - повышение точности и надежности системы за счет исключения поисковых колебаний в экстремуме. Это достигается введением линейного корректирующего звена, передаточная функция которого представляет собой произведение идеального дифференциатора и двух колебательных звеньев, в замкнутый контур, являющийся по сути автогенератором, амплитуда автоколебаний которого зависит от степени отклонения от экстремума и в экстремуме равна нулю. 1 ил.
| Многоканальная система экстремальногоРЕгулиРОВАНия | 1979 |
|
SU824141A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| 1979 |
|
SU826272A2 | |
| Кипятильник для воды | 1921 |
|
SU5A1 |
